一种用于凸极永磁电机的位置传感器零位校正方法及系统
本发明属于电机控制领域,更具体地,涉及一种用于凸极永磁电机的位置传感器零位校正方法及系统。
背景技术:
1、永磁电机因其功率密度大、效率高、结构简单而被广泛应用于现代驱动系统中。在对成本不太敏感而对控制性能要求较高的场合,一般会在电机中安装测量转子位置的有较高精度的传感器,如旋转变压器、光电编码器、磁编码器等,来准确测量转子机械角度位置,进而计算得到转子的电角度位置。受限于制造成本和安装工艺,实际电机的位置传感器在安装时与转子实际位置有一定的机械角度偏差,称为零位偏差。对于规模量产的电机型号,在出厂前一般会进行调零检测工序,并记录偏差值以供电机控制器实现软件算法修正;对于实验用样机,该偏差有时可以为任意角度,需要自行进行零位偏差测量标定。而电机拆装维修、位置传感器故障、驱动控制器更换以及软件数据更新等问题都可能导致位置传感器零位信息丢失或失效,需要重新标定。实际应用中采用的电机一般是高极对数电机,转子机械角度零位偏差的标定误差换算为电角度时将成倍增加。因此,高可操作性、高精度的永磁电机位置传感器的零位偏差校正方法对于永磁电机控制具有重要意义。
2、目前,主要的位置传感器零位偏差校正方法主要有以下几种:一是预定位法,即在电机空载情况下通入给定的电压或电流,使得电机转子在恒定定子磁场的作用下旋转到设计位置,可由此时的位置传感器测量值得到零位偏差。此类方法操作简单,应用最广,但估计精度受电机负载转矩的影响,且估计过程转子会发生不定向的转动。二是通过无位置传感器控制技术来估计转子初始位置,进而获得零位偏差,主要原理是通过脉冲电压注入来获得电机饱和效应或凸极效应中含有的转子位置信息。此类算法可保持电机静止,但算法较为复杂,对控制器计算性能要求较高,且由于逆变器和电机的非线性特性及电传感器噪声问题而精度较低。三是借助外部台架反拖电机,通过电机反电动势或三相短路电流来校准零位偏差。该类方法精度较高,但对外部设备要求较高,适用范围有限。四是通过电机在矢量控制时的电流来计算零位偏差,该类方法需让电机运行于设计工况,精度受限于电流采样精度,且要求初始偏差不能太大。校正的关键是确定转子位置并和与之对应的位置传感器的测量值进行比较。
3、近年来,带有凸极性的永磁电机,如内嵌式永磁同步电机、永磁辅助型同步磁阻电机等,由于其相较于隐极式同步电机具有转子机械强度更高、磁钢成本更低、恒功率范围更宽、故障容错能力更强等优点,受到越来越多的关注。在该类电机上使用传统的预定位算法时,电机的电磁转矩除了永磁分量还有由凸极性带来的磁阻分量。磁阻分量转矩将降低传统方法的定位精度,使得该方法在特定电机上效果较差。
技术实现思路
1、针对现有技术的缺陷和改进需求,本发明提供了一种用于凸极永磁电机的位置传感器零位校正方法及系统,其目的在于,提高凸极永磁电机的位置传感器零位偏差校正的精度,且尽量便于实际工程现场实施。
2、为实现上述目的,本发明一方面提供了一种用于凸极永磁电机的位置传感器零位校正方法,包括以下步骤:
3、由永磁体磁链ψm、直轴电感ld、交轴电感lq计算定子电流的第一阈值isthd1和第二阈值isthd2;
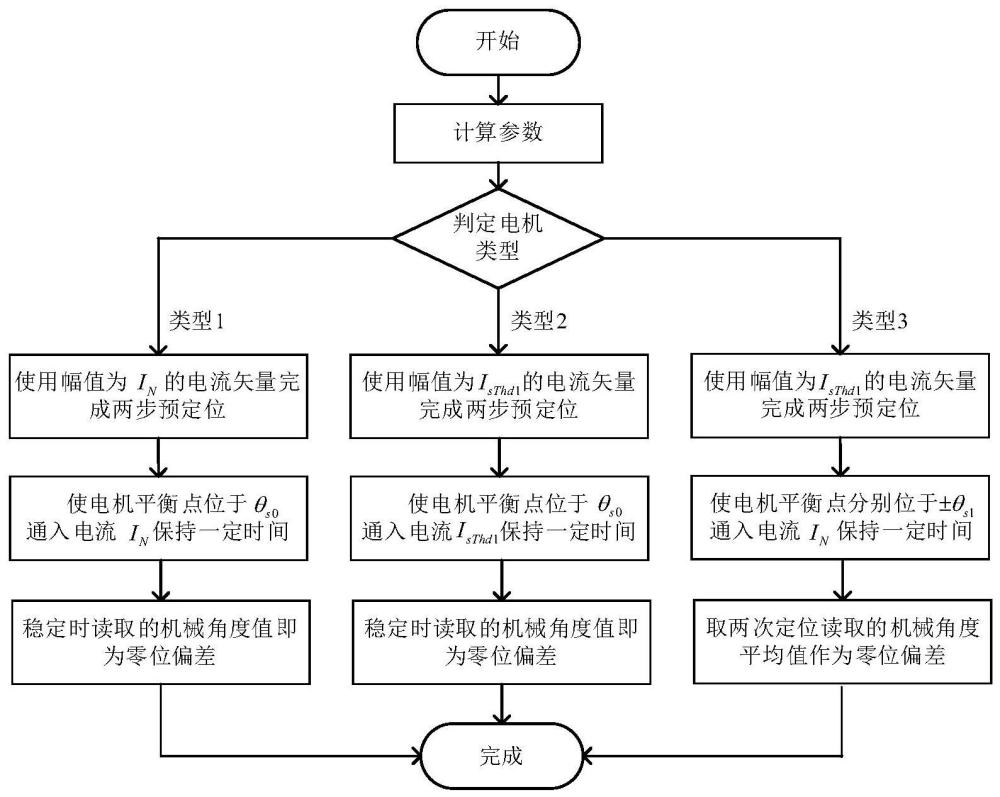
4、判断额定定子电流in与所述isthd1和isthd2的关系,将凸极永磁电机分为3种类型:若in≤isthd1,归为类型1;若isthd1<in≤isthd2,归为类型2;若isthd2<in,归为类型3;
5、对于类型1:设定定子电流的给定值的电角度幅值is*=in,使控制器进入电流闭环,保持t1时间;再设定is*=in,使控制器进入电流闭环,保持t1时间;再设定is*=in,使控制器进入电流闭环,保持t2时间;读取转子的机械角度值,即为零位偏差角度θms;
6、对于类型2:设定定子电流的给定值的电角度幅值is*=isthd1,使控制器进入电流闭环,保持t1时间;再设定is*=isthd1,使控制器进入电流闭环,保持t1时间;再设定is*=isthd1,使控制器进入电流闭环,保持t2时间;读取转子的机械角度值,即为零位偏差角度θms;
7、对于类型3:设定定子电流的给定值的电角度幅值is*=isthd1,使控制器进入电流闭环,保持t1时间;再设定is*=isthd1,使控制器进入电流闭环,保持t1时间;再设定is*=in,使控制器进入电流闭环,保持t2时间;读取转子的机械角度值θm1;再设定is*=isthd1,使控制器进入电流闭环,保持t1时间;再设定is*=in,使控制器进入电流闭环,保持t2时间;最后读取转子的机械角度值θm2;则零位偏差角度
8、其中,所述第一阈值isthd1和第二阈值isthd2为:
9、特别地,若θm1和θm2分布在角度区间[0,2π)两端,此时,
10、进一步地,θs1表示为:
11、进一步地,t1为2~5秒。
12、进一步地,t2为3~10秒。
13、本发明另一方面提供了一种用于凸极永磁电机的位置传感器零位校正系统,包括:计算机可读存储介质和处理器;
14、所述计算机可读存储介质用于存储可执行指令;
15、所述处理器用于读取所述计算机可读存储介质中存储的可执行指令,执行上述的用于凸极永磁电机的位置传感器零位校正方法。
16、通过本发明所构思的以上技术方案,与现有技术相比,由于考虑了凸极永磁电机永磁转矩和磁阻转矩随电流变化的特点,针对不同凸极率、额定电流和磁链大小的电机实施不同的校正步骤,能够取得降低负载转矩对零位偏差校正过程干扰,提高电机零位偏差校正精度的有益效果。
技术特征:
1.一种用于凸极永磁电机的位置传感器零位校正方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,所述第一阈值isthd1和第二阈值isthd2为:
3.根据权利要求1所述的方法,其特征在于,对于类型3,若θm1和θm2分布在角度区间[0,2π)两端,此时,
4.根据权利要求1所述的方法,其特征在于,θs1表示为:
5.根据权利要求1所述的方法,其特征在于,t1为2~5秒。
6.根据权利要求1所述的方法,其特征在于,t2为3~10秒。
7.一种用于凸极永磁电机的位置传感器零位校正系统,其特征在于,包括:计算机可读存储介质和处理器;
技术总结
本发明公开了一种用于凸极永磁电机的位置传感器零位校正方法及系统,属于电机控制领域。本发明考虑了凸极永磁电机永磁转矩和磁阻转矩随电流变化的特点,针对不同凸极率、额定电流和磁链大小的电机实施不同的校正步骤,能够取得降低负载转矩对零位偏差校正过程干扰,提高电机零位偏差校正精度的有益效果。本发明在永磁磁链较小的凸极永磁同步电机上具有更高的校正精度,且操作便捷,在通用电机变频器上即可实现,无需新增硬件。
技术研发人员:曲荣海,谭越瑾,宋康健,严晨,李子旻,刘子睿,孔武斌
受保护的技术使用者:华中科技大学
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!