一种3D扫描测量设备及采用该设备进行测量的方法与流程
本申请涉及3d测量,尤其是一种3d扫描测量设备及采用该设备进行测量的方法。
背景技术:
1、3d扫描测量设备是一种用于获取物体表面几何尺寸和特征的设备。涡轮是一种旋转的机械部件,通常由叶片和轮盘组成,涡轮的叶片形状一般具有弯曲的叶面和复杂的曲线的特点。
2、因为涡轮的形状复杂,3d测量设备的测量探针很难测量到叶片内部的形状结构,此时需要一个辅助3d测量设备测量的系统,可以辅助测量探针伸入叶片的底部去测量叶片结构。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例,在本部分以及本申请的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述和/或现有技术中所存在的问题,提出了本发明。
3、为解决上述技术问题,本发明提供如下技术方案:
4、一种3d扫描测量设备,包括三坐标测量系统,所述三坐标测量系统包括测试探针,其特征在于:
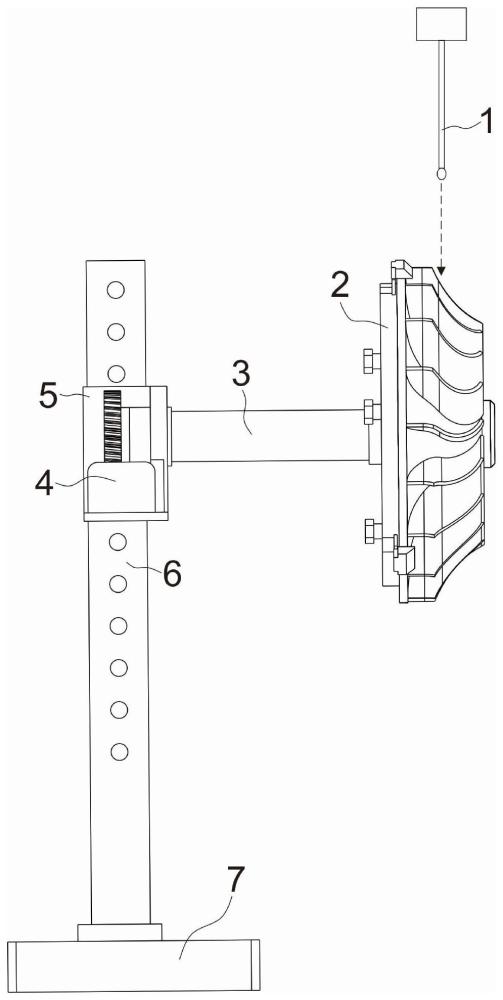
5、还包括测量辅助系统,所述测量辅助系统包括一涡轮转动系统;
6、涡轮转动系统包括一电动机,所述电动机驱动联接到一转轴,所述转轴上设置有固定涡轮的固定机构;
7、所述测试探针的指向方向与转轴的轴向方向垂直设置;
8、还包括一电动驱动系统,电动驱动系统控制联接所述电动机;
9、还设置有微处理器系统,所述微处理器系统的信号输入端连接到红外测距模块,所述微处理器系统的信号输出端连接到所述电动驱动系统的信号输入端;
10、所述红外测距模块的感应光口探测方向与测量探针方向一致;
11、感应光口与测量探针的间距小于2mm。
12、首先,本发明对一种3d扫描测量设备进行了优化,优化后,红外测距模块可以感应涡轮的叶片底部距离,红外测距模块测到涡轮叶片底部最大距离时,测量探针可深入叶片中测量叶片结构的结构,如此可以辅助测量探针伸入叶片的底部去测量叶片结构;其次,利用涡轮转动系统控制电动机运动,其转轴转动精度更高,防止涡轮转动过量影响测量精度。
13、优选,所述电动机固定安装在安装台上,所述转轴转动配合安装在安装台上,所述安装台连接在支撑架上;本发明对一种3d扫描测量设备中的电动机和转轴结构进行了优化,优化后用安装台安装电动机和转轴,使电动机和转轴运行的更稳定。
14、优选,所述安装台上设置有所述电动机上设置有驱动蜗杆,所述转轴上设置有蜗轮,所述驱动蜗杆与所述蜗轮啮合;本发明对一种3d扫描测量设备中的电动机和转轴进行了优化,优化后电动机传动更稳定,且电机停止后转轴自锁不会转动。
15、优选,所述支撑架下方设置有固定座,所述固定座至少有一个侧面可用于校平的金属座,且此面与所述转轴轴向平行;本发明对一种3d扫描测量设备中的支撑架进行了优化,优化后支撑架更稳定且方便用校表将固定座校平。
16、优选,所述转动杆呈水平状态设置;本发明对一种3d扫描测量设备中的转动杆进行了优化,优化后转动杆水平设置其精度更高。
17、优选,所述固定机构上设有螺纹连接的夹爪;本发明对一种3d扫描测量设备中的固定机构进行了优化,优化后夹爪用螺纹连接在固定机构上方便涡轮在夹起时对其位置校准。
18、优选,所述固定机构上设置有微调螺栓;本发明对一种3d扫描测量设备中的固定机构进行了优化,优化后可用微调螺栓对涡轮位置调整,防止涡轮没有夹平。
19、优选,所述红外测距模块的测距范围大于30cm;本发明对一种3d扫描测量设备中的红外测距模块进行了优化,使红外测距模块测距距离大于探针长度,防止测试时碰坏探针。
20、优选,采用一种3d扫描测量设备进行测量的方法包括s1、将需要测量的涡轮固定到涡轮转动系统中用固定机构固定;s2、所述三坐标测量系统控制测试探针运行到需要测量的零件上方,测量辅助系统开始工作,红外测距模块沿测试探针方向测试并记录下感应光口到涡轮的距离并发送给微处理器系统,电驱动系统驱动电动机带动固定着涡轮的转轴旋转;s3、微处理器系统将红外测距模块测量的距离数据对比,选取最大距离位置微处理器系统发出停止指令使所述电动驱动系统控制所述电动机停止运行;s4、停止后红外测距模块继续测量并将距离数据发送给未处理器系统,微处理器系统将停止后的数据与记录中是最大距离进行对比,距离达到最大则发送开始测量指令给三坐标测量系统;微处理器系统发出停止指令给电动驱动系统控制,停止后红外测距模块继续测量的距离未达最大,则微处理器系统根据记录发送调整指令给电动驱动系统控制电动机调整涡轮位置,然后继续对比距离,直到达到最大距离发出开始测量指令;通过采用一种3d扫描测量设备进行测量的方法更精确的控制涡轮,使涡轮停止位置为最佳测试探针测量探入位置。
技术特征:
1.一种3d扫描测量设备,包括三坐标测量系统,所述三坐标测量系统包括测试探针,其特征在于:
2.根据权利要求1所述的一种3d扫描测量设备,其特征在于:所述电动机固定安装在安装台上,所述转轴转动配合安装在安装台上,所述安装台连接在支撑架上。
3.根据权利要求2所述的一种3d扫描测量设备,其特征在于:所述电动机上设置有驱动蜗杆,所述转轴上设置有蜗轮,所述驱动蜗杆与所述蜗轮啮合。
4.根据权利要求3所述的一种3d扫描测量设备,其特征在于:所述支撑架下方设置有固定座,所述固定座至少有一个侧面可用于校平的金属座,且此面与所述转轴轴向平行。
5.根据权利要求4所述的一种3d扫描测量设备,其特征在于:所述转轴呈水平状态设置。
6.根据权利要求5所述的一种3d扫描测量设备,其特征在于:所述固定机构上设有螺纹连接的夹爪。
7.根据权利要求6所述的一种3d扫描测量设备,其特征在于:所述固定机构上设置有微调螺栓。
8.根据权利要求1-7中任意一项所述的一种3d扫描测量设备,其特征在于:所述红外测距模块的测距范围大于30cm。
9.采用一种3d扫描测量设备进行测量的方法,根据权力要求1所述的一种3d扫描测量设备,其特征在于:
10.根据权利要求9所述的采用一种3d扫描测量设备进行测量的方法,其特征在于:微处理器系统发出停止指令给电动驱动系统控制,停止后红外测距模块继续测量的距离未达最大,则微处理器系统根据记录发送调整指令给电动驱动系统控制电动机调整涡轮位置,然后继续对比距离,直到达到最大距离发出开始测量指令。
技术总结
本申请涉及3d测量技术领域,尤其是一种3D扫描测量设备及采用该设备进行测量的方法,包括一种3D扫描测量设备,包括三坐标测量系统,还包括测量辅助系统,所述测量辅助系统包括一涡轮转动系统;涡轮转动系统包括一电动机,所述电动机驱动联接到一转轴,所述转轴上设置有用于固定涡轮的固定机构;所述测试探针的指向方向与转轴的轴向方向垂直设置;还包括一电动驱动系统,电动驱动系统控制联接所述电动机;还设置有微处理器系统,所述微处理器系统的信号输入端连接到红外测距模块,所述微处理器系统的信号输出端连接到所述电动驱动系统的信号输入端;所述红外测距模块的感应光口探测方向与测量探针方向一致。
技术研发人员:许郭亮,董昌盛,朱永昌,陈博文,陆敏
受保护的技术使用者:上海万泽精密铸造有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!