一种航向确定方法、装置、设备及介质与流程
本发明涉及无人机,尤其涉及一种航向确定方法、装置、设备及介质。
背景技术:
1、无人机一般优先rtk(real-time kinematic,实时动态)载波相位差分技术天线作为航向源,但是常常存在rtk信号不稳定的情况。
2、磁罗盘因其体积小、低功耗、成本低等优点正被广泛应用于无人机航向测量系统中,将磁罗盘作为备选航向源可以来弥补rtk信号不稳定的情况。
3、然而作为无人机飞控系统中的核心部件,其测量地磁场矢量比较容易受到外界环境的干扰。无人机的电机电流与载荷电流都比较大,所产生的磁场干扰就比较严重,对于无人机基于磁罗盘的航向确定精度影响较大,最终导致无人机无法稳定飞行,甚至坠机。尤其无人机在飞行过程中电机与载荷的状态复杂多变,对磁罗盘测量值的干扰无法直接估测与去除。
技术实现思路
1、本发明提供了一种航向确定方法、装置、设备及介质,以实现对无人机航向的准确确定。
2、根据本发明的第一方面,提供了一种航向确定方法,包括:
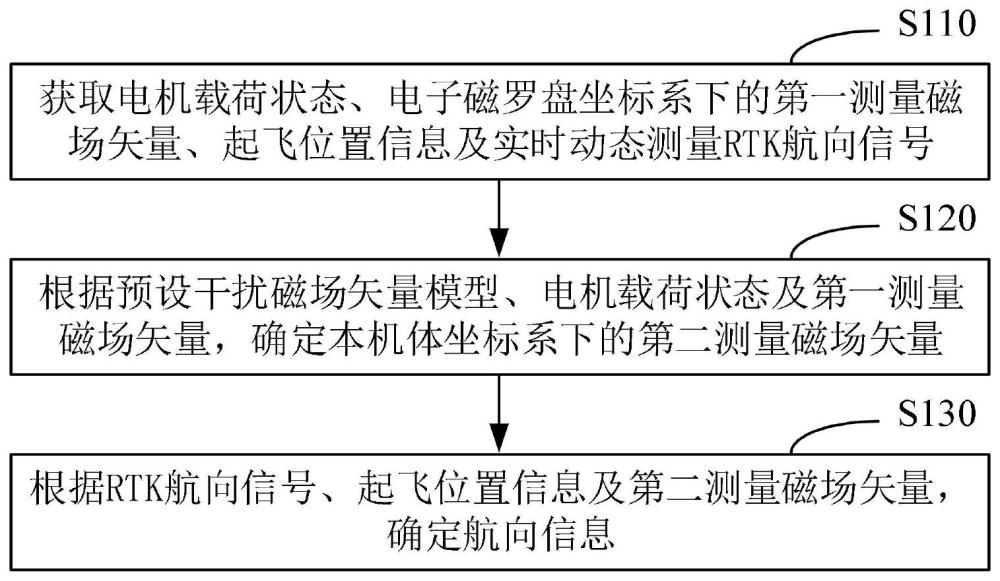
3、获取电机载荷状态、电子磁罗盘坐标系下的第一测量磁场矢量、起飞位置信息及实时动态测量rtk航向信号;
4、根据预设干扰磁场矢量模型、所述电机载荷状态及所述第一测量磁场矢量,确定本机体坐标系下的第二测量磁场矢量;
5、根据所述rtk航向信号、起飞位置信息及所述第二测量磁场矢量,确定航向信息。
6、根据本发明的第二方面,提供了一种航向确定装置,包括:
7、信息获取模块,用于获取电机载荷状态、电子磁罗盘坐标系下的第一测量磁场矢量、起飞位置信息及rtk航向信号;
8、磁场矢量确定模块,用于根据预设干扰磁场矢量模型、所述电机载荷状态及所述第一测量磁场矢量,确定本机体坐标系下的第二测量磁场矢量;
9、航向确定模块,用于根据所述rtk航向信号、起飞位置信息及所述第二测量磁场矢量,确定航向信息。
10、根据本发明的第三方面,提供了一种电子设备,所述电子设备包括:
11、至少一个处理器;以及
12、与所述至少一个处理器通信连接的存储器;其中,
13、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的航向确定方法。
14、根据本发明的第四方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的航向确定方法。
15、本发明实施例的技术方案,通过获取电机载荷状态、电子磁罗盘坐标系下的第一测量磁场矢量、起飞位置信息及实时动态测量rtk航向信号;根据预设干扰磁场矢量模型、电机载荷状态及第一测量磁场矢量,确定本机体坐标系下的第二测量磁场矢量;根据rtk航向信号、起飞位置信息及第二测量磁场矢量,确定航向信息。通过预设干扰磁场矢量模型、电机载荷状态及第一测量磁场矢量,确定出滤除了干扰磁场的第二测量磁场矢量,进而通过rtk航向信号、起飞位置信息及第二测量磁场矢量,确定航向信息。实现了在无rtk航向信号时,对航向信息的确定,解决了现有电子磁罗盘判别航向不准确的问题,提高了航向确定的准确性。
16、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种航向确定方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据预设干扰磁场矢量模型、所述电机载荷状态及所述第一测量磁场矢量,确定本机体坐标系下的第二测量磁场矢量,包括:
3.根据权利要求1所述的方法,其特征在于,所述根据所述rtk航向信号、起飞位置信息及所述第二测量磁场矢量,确定航向信息,包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述第二测量磁场矢量及所述理论地磁场矢量,确定当地坐标系下的第二干扰磁场矢量,包括:
5.根据权利要求3所述的方法,其特征在于,所述根据所述第二干扰磁场矢量、所述理论地磁场矢量及所述第二测量磁场矢量,确定航向信息,包括:
6.根据权利要求5所述的方法,其特征在于,所述根据所述第二可测地磁场矢量及所述第二测量磁场矢量,确定所述航向信息,包括:
7.根据权利要求1所述的方法,其特征在于,所述预设干扰磁场矢量模型的建立步骤包括:
8.一种航向确定装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的航向确定方法。
技术总结
本发明公开了一种航向确定方法、装置、设备及介质。该方法包括:获取电机载荷状态、电子磁罗盘坐标系下的第一测量磁场矢量、起飞位置信息及实时动态测量RTK航向信号;根据预设干扰磁场矢量模型、电机载荷状态及第一测量磁场矢量,确定本机体坐标系下的第二测量磁场矢量;根据RTK航向信号、起飞位置信息及第二测量磁场矢量,确定航向信息。通过预设干扰磁场矢量模型、电机载荷状态及第一测量磁场矢量,确定出滤除了干扰磁场的第二测量磁场矢量,进而通过RTK航向信号、起飞位置信息及第二测量磁场矢量,确定航向信息。实现了在无RTK航向信号时,对航向信息的确定,解决了现有电子磁罗盘判别航向不准确的问题,提高了航向确定的准确性。
技术研发人员:刘子健,李少斌
受保护的技术使用者:拓攻(南京)机器人有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!