一种模拟水下航行体近冰面航行的冰水池试验装置
本发明属于低温拖曳冰水池模型试验,涉及一种模拟水下航行体近冰面航行的冰水池试验装置。
背景技术:
1、航行性能、稳性和操纵性是评价水下航行体整体效能的重要方面,目前学界和工程界常用的研究方法包括理论分析、数值模拟和模型试验等。其中,水下流场环境的复杂性和结构型式的多样性使得很难通过理论分析得到准确的解析解。随着近些年计算流体力学理论的快速发展和高性能计算机的不断进步,数值模拟方法在水下航行体的研究中得到了越来越多的应用,但航行体在水下复杂的流固耦合作用,使得数值模拟结果与真实情况之间总是存在一定差异,需要现场实测或模型试验的验证和优化。与理论分析和数值模拟方法相比,模型试验仍是目前水下航行体研究中的主要方法,兼顾了规律性成果的可靠性和研究成本。
2、针对水下航行体开展的模型试验主要包括阻力试验、稳性试验和操纵性试验等。其中,阻力试验常在拖曳水池中进行,多使用水上拖车强制拖曳或自航模型试验装置。当使用水上拖车试验装置时,常通过单剑或双剑将水下航行体模型固定在拖车底部,依靠升降平台调节模型浸深,由水上拖车以一定速度拖曳模型在水下航行。水下航行体模型可自带动力系统,但航速是由水上拖车控制的。2005年,racine在美国海军水面作战中心(nswc)拖曳水池采用强制拖曳方式对nbor型非回转艇型进行了阻力试验。2011年,李刚在哈尔滨工程大学拖曳水池对一型穿梭潜器进行了拖曳阻力测试。另一种情况下,当使用自航模型试验装置时,水下航行体模型需自带完整的动力系统和控制系统,以完全自浮的状态在水下自航。2008年,roddy在美国大卫泰勒水池使用自航模型试验装置对nnemo-1和nnemo-2型回转体进行了阻力试验。2020年,王文晋在华中科技大学拖曳水池使用自浮自航模型试验装置测试了德国标准艇模的航行阻力。
3、水下航行体的稳性试验常在水池和风洞实验室中进行,其中,水池试验中水下航行体模型常为自浮自航式试验装置;风洞试验中一般将模型结构固定,通过调节风场测试结构稳性。2023年,彭亮斌在中国船舶科学研究中心的风洞实验室中测试了一型非回转扁平航行体在流场中的稳性。操纵性试验需要较大的水池空间,一般在大尺寸的方形水池或旋臂水池中进行。2011年,keegan等在美国大卫泰勒水池操纵和控制分部,对dtmb66型航行体进行了操纵性试验。彭亮斌(2023)也在旋臂水池中开展了部分操纵性测试。
4、除上述水下航行体的阻力试验、稳性试验和操纵性试验外,俄罗斯肖洛姆州立大学的研究团队针对水下航行体的兴波破冰问题开展了长期的研究工作,并开展了多系列水下航行体近冰面航行的冰水池试验。由于水池被冰盖覆盖,水下航行试验常用的水面拖车拖曳装置无法使用。另一方面,冰水池水深一般较浅,冰盖会对遥控信号产生阻隔作用,试验操作规程也不允许自浮自航式水下航行体进行近冰面航行,导致这类试验装置不能在冰水池中使用。据此,俄罗斯研究团队设计了一套通过钢丝绳驱动航行体模型在近冰面航行的牵引试验装置,通过沿轴心穿透航行体模型的钢丝绳和滑轮组,在伺服电机驱动下牵引航行体模型在冰下运动。
5、综上所述,目前常用于模拟水下航行体航行的试验装置,包括水上拖车拖曳系统、自浮自航模型装置和钢丝绳牵引系统等,在用于模拟水下航行体近冰面航行的冰水池模型试验时均存在一定问题。其中,水上拖车拖曳系统需要通过穿越冰面的剑与模型连接,会对模型冰盖造成破坏。自浮自航模型装置需配备高精度的控制系统和动力系统,模型体积和重量较大,成本较高,冰水池的水深条件难以满足该类装置的使用要求;同时,试验操作规程也不允许自浮自航式水下航行体进行近冰面航行。钢丝绳牵引系统可以避免使用穿越冰面的连接构件,但钢丝绳的柔性难以有效限制水下航行体的垂荡和横荡运动,在航行体航速稳定性和航行姿态稳定性的保持上存在缺陷;同时,该装置在牵引系统中布置阻力测量传感器也存在一定的技术困难。因此,需研发一种新的模拟水下航行体近冰面航行的冰水池试验装置,能够在不破坏冰盖的情况下,实现对模型航速、姿态、浸深的准确控制和保持,并可以方便的测量航行阻力。
技术实现思路
1、本发明的目的是提供一种能够有效模拟航行体近冰面航行的试验装置。该试验装置以水下有轨运动平台为核心,将水下航行体模型固定在运动平台上,通过传动链条驱动平台运动,从而实现在不破坏冰盖的情况下,准确调控水下航行体模型的航速、姿态和浸深,并同步测量模型的航行阻力。技术方案如下:
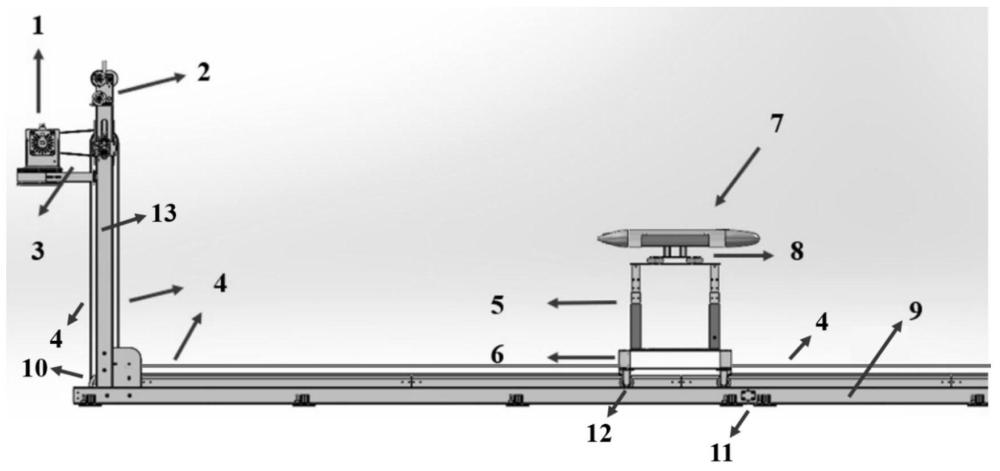
2、一种模拟水下航行体近冰面航行的冰水池试验装置,包括水下轨道9、运动平台6、闭合回路式传动链条4、伺服驱动系统1,其中,
3、水下轨道9,铺设在冰水池底部,包括两排拼接而成的轨道,拼接处通过预制连接件11固定;
4、运动平台6,底部通过两排轨道轮12置于水下轨道9上,用于模拟水下航行体的直线航行,在运动平台6上设置有高度可调的连接支架5,连接支架用于固定水下航行体模型;
5、闭合回路式传动链条4,作为运动平台的主要传动构件,其一端与运动平台的前部相连,绕整个水下轨道和池壁一端固定支架13一周,传动链条另一端连接在运动平台后部,其中,固定支架13立于冰水池一端池壁旁,上部设置有齿轮组2,底部设置有传动齿轮10,闭合回路式传动链条即通过上部的齿轮组和下部的传动齿轮环绕固定支架一周,并在底部传动齿轮处由垂向转为沿水平向延伸;
6、伺服驱动系统,通过动力来源传动链条3与齿轮组2相连,从而驱动闭合回路式传动链条4带动运动平台6沿水下轨道9运动。
7、进一步的,所述轨道为矩形管轨道。
8、进一步的,所述预制连接件分别预制两排轨道的固定位置,与两排轨道组成框架结构,并设置有用于调节轨道高度的调节部件用以保证轨道上表面高度、直线度、两排轨道间距指标满足设计要求。所述调节部件包括固定螺栓。
9、进一步的,水下轨道预制连接件的布置间隔不大于1m。
10、进一步的,水下轨道用配重块压稳固定。
11、进一步的,还包括测力传感器8,测力传感器8设置在连接支架与水下航行体模型7之间,用于测量航行体航行过程中受到的阻力。
12、进一步的,闭合回路式传动链条4可调节为张紧或松弛状态。
13、本发明的实质性特点为:①该冰水池试验装置可在不破坏模型冰盖的情况下,保证水下航行体模型的航速、姿态和浸深准确、稳定,并能同步测量模型的航行阻力。②整套试验装置拆装灵活,适应性强,可适用于各冰水池。
技术特征:
1.一种模拟水下航行体近冰面航行的冰水池试验装置,包括水下轨道(9)、运动平台(6)、闭合回路式传动链条(4)、伺服驱动系统(1),其中,
2.根据权利要求1所述的冰水池试验装置,其特征在于,所述轨道为矩形管轨道。
3.根据权利要求1所述的冰水池试验装置,其特征在于,所述预制连接件分别预制两排轨道的固定位置,与两排轨道组成框架结构,并设置有用于调节轨道高度的调节部件用以保证轨道上表面高度、直线度、两排轨道间距指标满足设计要求。
4.根据权利要求3所述的冰水池试验装置,其特征在于,所述调节部件包括固定螺栓。
5.根据权利要求1所述的冰水池试验装置,其特征在于,水下轨道预制连接件的布置间隔不大于1m。
6.根据权利要求1所述的冰水池试验装置,其特征在于,水下轨道用配重块压稳固定。
7.根据权利要求1所述的冰水池试验装置,其特征在于,还包括测力传感器(8),测力传感器(8)设置在连接支架与水下航行体模型(7)之间,用于测量航行体航行过程中受到的阻力。
8.根据权利要求1所述的冰水池试验装置,其特征在于,闭合回路式传动链条(4)可调节为张紧或松弛状态。
技术总结
本发明涉及一种模拟水下航行体近冰面航行的冰水池试验装置,包括水下轨道、运动平台、闭合回路式传动链条、伺服驱动系统,其中,水下轨道,铺设在冰水池底部,包括两排拼接而成的轨道,拼接处通过预制连接件固定;运动平台,底部通过两排轨道轮置于水下轨道上,在运动平台上设置有连接支架,用于固定水下航行体模型;闭合回路式传动链条,作为运动平台的主要传动构件,其一端与运动平台的前部相连,绕整个水下轨道和池壁一端固定支架一周,传动链条另一端连接在运动平台后部;伺服驱动系统链条,通过动力来源传动链条与齿轮组相连,从而驱动闭合回路式传动链条带动运动平台沿水下轨道运动。
技术研发人员:田育丰,黄焱,孙剑桥,朱本瑞
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!