用于半导体器件缺陷的定位方法、处理器及存储介质与流程
本申请涉及半导体,具体涉及一种用于半导体器件缺陷的定位方法、处理器、存储介质及计算机设备。
背景技术:
1、半导体器件,例如光电探测器、半导体led芯片、太阳电池等,在晶体生长、工艺制备和组件封装过程中不可避免引入位错、杂质、划痕、裂纹等,这种缺陷将半导体器件的性能降低,例如使得太阳能电池器件的光电转换效率降低等。因此,如何准确地检测出半导体器件存在的缺陷是亟需解决的技术难题。
2、现有技术中,提供了一种采用光致发光(pl)成像定位缺陷的方法。具体地,该方案是通过滤镜得到pl图像,同样采用灰度算法进行缺陷定位。pl图像呈现的太阳电池发光为黑白图,发光区为白色,栅线不发光区域为黑色。当存在缺陷时,缺陷区域在pl下呈现一定大小的黑色圆斑,此圆斑大小和光亮度的强弱有关。然而,当电池片存在翘曲使得距离光源高度不一或者缺陷大小不一,使得缺陷导致的黑斑大小不一,边缘不明显,因此会导致使用传统算法时对于图像的灰度判断非常不准确,进而导致pl定位不准确。特别地,当多个缺陷叠加在同一片区域,如圆的边缘定位不清晰,进一步定位缺陷大小时(大概10um)将变得十分困难,使得针对于缺陷的定位准确率较低。
技术实现思路
1、本申请实施例的目的是提供一种用于半导体器件缺陷的定位方法、处理器、存储介质及计算机设备。
2、为了实现上述目的,本申请第一方面提供一种用于半导体器件缺陷的定位方法,包括:
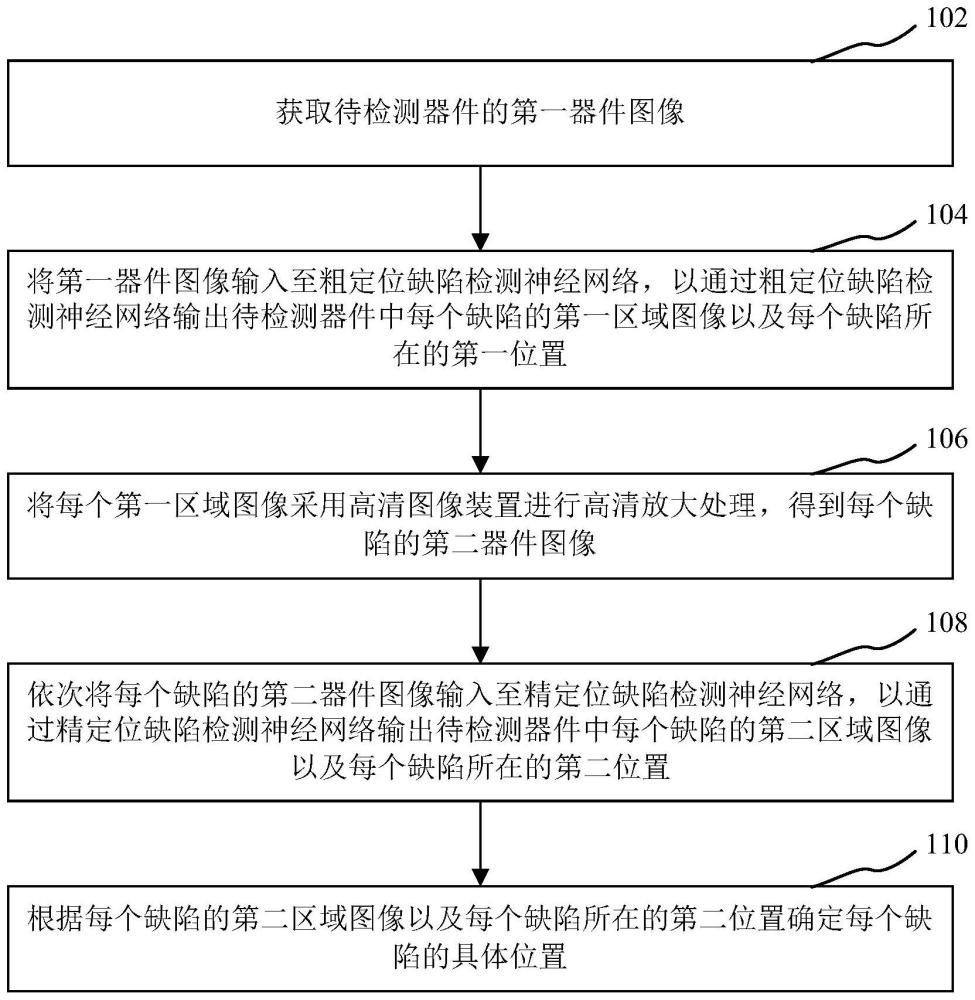
3、获取待检测器件的第一器件图像;
4、将所述第一器件图像输入至粗定位缺陷检测神经网络,以通过所述粗定位缺陷检测神经网络输出所述待检测器件中每个缺陷的第一区域图像以及每个缺陷所在的第一位置;
5、将每个第一区域图像采用高清图像装置进行高清放大处理,得到每个缺陷的第二器件图像;
6、依次将每个缺陷的第二器件图像输入至精定位缺陷检测神经网络,以通过所述精定位缺陷检测神经网络输出所述待检测器件中每个缺陷的第二区域图像以及每个缺陷所在的第二位置;
7、根据每个缺陷的第二区域图像以及每个缺陷所在的第二位置确定每个缺陷的具体位置。
8、在本申请实施例中,定位方法还包括:在根据每个缺陷的第二区域图像以及每个缺陷所在的第二位置确定每个缺陷的具体位置之后,根据每个缺陷的第二区域图像以及每个缺陷所在的第二位置确定每个缺陷的缺陷类型;在所述缺陷类型不是预设的功能缺陷类型的情况下,对所述缺陷进行钝化操作,其中,所述钝化操作包括切割,物理局部隔离,化学处理中的至少一者;采用预设的合适波长光源,利用光致发光原理激发钝化后的待检测器件,并采集所述钝化后的待检测器件的第三器件图像;将所述第三器件图像再次输入至所述粗定位缺陷检测神经网络,以通过所述粗定位缺陷检测神经网络检测所述钝化后的待检测器件中是否存在缺陷;在通过所述粗定位缺陷检测神经网络检测到所述钝化后的待检测器件中存在缺陷的情况下,表明钝化操作失败;在通过所述粗定位缺陷检测神经网络未检测到所述钝化后的待检测器件中存在缺陷的情况下,表明钝化操作成功。
9、在本申请实施例中,根据每个缺陷的第二区域图像以及每个缺陷所在的第二位置确定每个缺陷的缺陷类型包括:获取缺陷类型表,所述缺陷类型表中包括多种类型的缺陷的缺陷参数,所述缺陷参数包括所述缺陷的尺寸大小和所述缺陷相对于所在半导体器件的位置;将每个缺陷的第二区域图像以及每个缺陷所在的第二位置与所述缺陷类型表中的数据进行匹配,以确定每个缺陷所对应的缺陷类型。
10、在本申请实施例中,第一器件图像为pl图像,所述获取待检测器件的第一器件图像包括:确定所述待检测器件的制造材料;根据所述制造材料确定针对所述待检测器件进行检测的光源的目标波长;使用所述目标波长的光源激发所述待检测器件,并通过图像采集装置获取所述待检测器件通过滤光片的pl图像。
11、在本申请实施例中,定位方法还包括针对所述粗定位缺陷检测神经网络的训练步骤,所述训练步骤包括:获取多个半导体器件的器件图像,并对每个器件中存在缺陷的位置进行标注,以得到每个半导体器件的样本图像;对所述样本图像进行数据增强处理;将增强处理后的样本图像依次输入至所述粗定位缺陷检测神经网络,以对所述粗定位缺陷检测神经网络进行训练。
12、在本申请实施例中,待检测器件为薄膜太能电池。
13、在本申请实施例中,粗定位缺陷检测神经网络与所述精定位缺陷检测神经网络均为yolox模型。
14、本申请第二方面提供一种处理器,被配置成执行上述的用于半导体器件缺陷的定位方法。
15、本申请第三方面提供一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如上述的用于半导体器件缺陷的定位方法的步骤。
16、本申请第四方面提供一种机器可读存储介质,该机器可读存储介质上存储有指令,该指令在被处理器执行时使得所述处理器被配置成执行上述的用于半导体器件缺陷的定位方法。
17、本申请第五方面提供一种用于半导体器件缺陷的定位装置,包括:
18、粗定位图像采集模块,用于获取待检测器件的第一器件图像;
19、粗定位缺陷检测模块,用于将所述第一器件图像输入至粗定位缺陷检测神经网络,以通过所述粗定位缺陷检测神经网络输出所述待检测器件中每个缺陷的第一区域图像以及每个缺陷所在的第一位置;
20、精定位图像采集模块,用于将每个第一区域图像采用高清图像装置进行高清放大处理,得到每个缺陷的第二器件图像;
21、精定位缺陷检测模块,用于依次将每个缺陷的第二器件图像输入至精定位缺陷检测神经网络,以通过所述精定位缺陷检测神经网络输出所述待检测器件中每个缺陷的第二区域图像以及每个缺陷所在的第二位置;
22、缺陷定位模块,用于根据每个缺陷的第二区域图像以及每个缺陷所在的第二位置确定每个缺陷的具体位置。
23、本方案中,将神经网络算法与传统的图像处理的方法结合,以对需要进行缺陷定位的半导体器件进行缺陷检测与定位,可以有效地提高检测与定位的准确率。并且,本方案中可以精确地确定每个缺陷的大小,使得后续对缺陷进行钝化操作时可以实现钝化面积最小化,极大程度上保留了电池的有效收取光的面积。
24、本申请实施例的其他特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种用于半导体器件缺陷的定位方法,其特征在于,所述定位方法包括:
2.根据权利要求1所述的用于半导体器件缺陷的定位方法,其特征在于,所述定位方法还包括:
3.根据权利要求2所述的用于半导体器件缺陷的定位方法,其特征在于,所述根据每个缺陷的第二区域图像以及每个缺陷所在的第二位置确定每个缺陷的缺陷类型包括:
4.根据权利要求1所述的用于半导体器件缺陷的定位方法,其特征在于,所述第一器件图像为pl图像,所述获取待检测器件的第一器件图像包括:
5.根据权利要求1所述的用于半导体器件缺陷的定位方法,其特征在于,所述定位方法还包括针对所述粗定位缺陷检测神经网络的训练步骤,所述训练步骤包括:
6.根据权利要求1所述的用于半导体器件缺陷的定位方法,其特征在于,所述待检测器件为薄膜太能电池。
7.根据权利要求1所述的用于半导体器件缺陷的定位方法,其特征在于,所述粗定位缺陷检测神经网络与所述精定位缺陷检测神经网络均为yolox模型。
8.一种用于半导体器件缺陷的定位装置,其特征在于,包括:
9.一种处理器,其特征在于,被配置成执行根据权利要求1至7中任意一项所述的用于半导体器件缺陷的定位方法。
10.一种机器可读存储介质,该机器可读存储介质上存储有指令,其特征在于,该指令在被处理器执行时使得所述处理器被配置成执行根据权利要求1至7中任一项所述的用于半导体器件缺陷的定位方法。
技术总结
本申请实施例提供一种用于半导体器件缺陷的定位方法、装置、处理器及存储介质。该方法包括:获取待检测器件的第一器件图像;将第一器件图像输入至粗定位缺陷检测神经网络,以通过粗定位缺陷检测神经网络输出待检测器件中每个缺陷的第一区域图像以及每个缺陷所在的第一位置;将每个第一区域图像采用高清图像装置进行高清放大处理,得到每个缺陷的第二器件图像;依次将每个缺陷的第二器件图像输入至精定位缺陷检测神经网络,以通过精定位缺陷检测神经网络输出待检测器件中每个缺陷的第二区域图像以及每个缺陷所在的第二位置;根据每个缺陷的第二区域图像以及每个缺陷所在的第二位置确定每个缺陷的具体位置。
技术研发人员:孙浩然,褚君浩,李华,王伟明
受保护的技术使用者:江苏宜兴德融科技有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!