激光雷达的飞行时间测量方法及装置与流程
本技术涉及激光雷达,并且更具体地,涉及激光雷达中的一种激光雷达的飞行时间测量方法及装置。
背景技术:
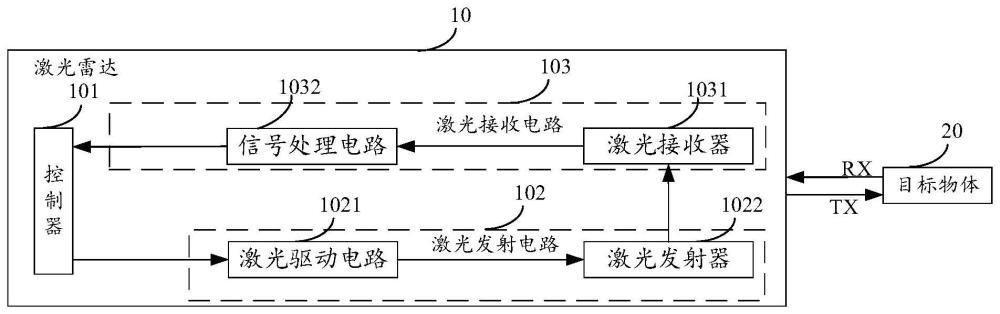
1、激光雷达,是一种通过发射出射激光探测目标物体的位置、速度等特征量的雷达系统。激光雷达的工作原理是通过向目标物体发射探测信号(出射激光),并接收从目标物体反射回来的回波信号,然后根据探测信号的发射起始时间和回波信号的接收时间确定激光传播时长(飞行时间),进而根据激光传播时长确定目标物体与激光雷达之间的距离。
2、然而,在实际应用中,在通过电信号传输电路触发探测信号触发,以及通过电信号传输电路进行回波信号传输的过程中,由于电信号传输电路本身具有一定的信号延时,且电信号传输电路的信号延时随温度变化而变化,因此,导致所得到的飞行时间存在较大的不确定性的延迟,进而降低了激光雷达的测量准确度。
技术实现思路
1、本技术提供了一种激光雷达的飞行时间测量方法及装置,该方法能够避免电信号传输电路的信号延时对目标物体对应的飞行时间的影响,有效提高激光雷达的测量准确度。
2、第一方面,提供了一种激光雷达的飞行时间测量方法,该方法包括:
3、控制延时电路的延时时间;
4、获取测量信号在参考电路中的第一测量时间,以及所述测量信号在测量电路中的第二测量时间;其中,所述参考电路或所述测量电路包括所述延时电路;
5、根据所述延时时间、所述第一测量时间和所述第二测量时间,确定目标物体对应的飞行时间。
6、结合第一方面,在某些可能的实现方式中,所述参考电路包括激光驱动电路、所述延时电路和信号处理电路,所述延时电路的控制端与控制器连接,所述延时电路的输入端与所述激光驱动电路的输出端连接,所述延时电路的输出端分别与所述信号处理电路的输入端和所述控制器连接。
7、结合第一方面和上述实现方式,在某些可能的实现方式中,所述控制延时电路的延时时间,包括:
8、获取第一时间和第二时间;其中,所述第一时间为所述目标物体与激光雷达之间的距离为所述激光雷达的最大测量距离时,所述目标物体对应的飞行时间;所述第二时间为所述测量电路发射的出射激光的最大脉冲宽度对应的时间间隔;
9、根据所述第一时间和所述第二时间,确定所述延时电路的第一目标延时时间;其中,所述第一目标延时时间大于所述第一时间和所述第二时间之和;
10、调整所述延时电路的延时时间为所述第一目标延时时间。
11、结合第一方面和上述实现方式,在某些可能的实现方式中,所述调整所述延时电路的延时时间为所述第一目标延时时间,包括:
12、获取所述延时电路的第一当前延时时间;
13、根据所述第一当前延时时间和所述第一目标延时时间,调整所述延时电路的延时时间为所述第一目标延时时间。
14、结合第一方面和上述实现方式,在某些可能的实现方式中,所述根据所述延时时间、所述第一测量时间和所述第二测量时间,确定目标物体对应的飞行时间,包括:
15、根据所述第一目标延时时间和所述第一测量时间的差值,确定第一参考时间;其中,所述第一参考时间为所述测量信号在所述参考电路的所述激光驱动电路和所述信号处理电路中的传输时间;
16、根据所述第一参考时间和所述第二测量时间的差值,确定所述目标物体对应的飞行时间。
17、结合第一方面和上述实现方式,在某些可能的实现方式中,所述测量电路包括激光驱动电路、激光发射器、激光接收器、所述延时电路和信号处理电路;
18、所述延时电路的控制端与控制器连接,所述激光驱动电路的输出端分别与所述延时电路的输入端和所述激光发射器连接,所述激光接收器与所述延时电路的输入端连接,所述延时电路的输出端分别与所述信号处理电路的输入端和所述控制器连接。
19、结合第一方面和上述实现方式,在某些可能的实现方式中,所述延时电路包括延时模块和延时开关,所述延时模块的控制端和所述延时开关的控制端分别与所述控制器连接,所述延时模块的输入端分别与所述激光驱动电路的输出端和所述激光接收器连接,所述延时模块的输出端与所述延时开关的输入端连接,所述延时开关的第一输出端与所述信号处理电路的输入端连接,所述延时开关的第二输出端与所述控制器连接。
20、结合第一方面和上述实现方式,在某些可能的实现方式中,所述控制延时电路的延时时间,包括:
21、获取第三时间;其中,所述第三时间为所述测量电路发射的出射激光的最大脉冲宽度对应的时间间隔;
22、根据所述第三时间,确定所述延时电路的第二目标延时时间;其中,所述第二目标延时时间大于所述第三时间;
23、调整所述延时电路的延时时间为所述第二目标延时时间。
24、结合第一方面和上述实现方式,在某些可能的实现方式中,所述根据所述延时时间、所述第一测量时间和所述第二测量时间,确定目标物体对应的飞行时间,包括:
25、根据所述第二目标延时时间和所述第一测量时间的和值,确定第二参考时间;其中,所述第二参考时间为所述测量信号在所述参考电路和所述延时电路中的传输时间;
26、根据所述第二测量时间和所述第二参考时间的差值,确定所述目标物体对应的飞行时间。
27、第二方面,提供了一种激光雷达的飞行时间测量装置,该装置包括:
28、控制器、存储器、参考电路、测量电路和延时电路;
29、其中,所述存储器存储有计算机程序,所述计算机程序用于由所述控制器加载并执行如下步骤:
30、控制延时电路的延时时间;
31、获取测量信号在参考电路中的第一测量时间,以及所述测量信号在测量电路中的第二测量时间;其中,所述参考电路或所述测量电路包括所述延时电路;
32、根据所述延时时间、所述第一测量时间和所述第二测量时间,确定目标物体对应的飞行时间。
33、结合第二方面和上述实现方式,在某些可能的实现方式中,所述参考电路包括激光驱动电路、所述延时电路和信号处理电路,所述延时电路的控制端与控制器连接,所述延时电路的输入端与所述激光驱动电路的输出端连接,所述延时电路的输出端分别与所述信号处理电路的输入端和所述控制器连接。
34、结合第二方面和上述实现方式,在某些可能的实现方式中,所述控制器,具体用于:
35、获取第一时间和第二时间;其中,所述第一时间为所述目标物体与激光雷达之间的距离为所述激光雷达的最大测量距离时,所述目标物体对应的飞行时间;所述第二时间为所述测量电路发射的出射激光的最大脉冲宽度对应的时间间隔;
36、根据所述第一时间和所述第二时间,确定所述延时电路的第一目标延时时间;其中,所述第一目标延时时间大于所述第一时间和所述第二时间之和;
37、调整所述延时电路的延时时间为所述第一目标延时时间。
38、结合第二方面和上述实现方式,在某些可能的实现方式中,所述控制器,具体用于:
39、获取所述延时电路的第一当前延时时间;
40、根据所述第一当前延时时间和所述第一目标延时时间,调整所述延时电路的延时时间为所述第一目标延时时间。
41、结合第二方面和上述实现方式,在某些可能的实现方式中,所述控制器,具体用于:
42、根据所述第一目标延时时间和所述第一测量时间的差值,确定第一参考时间;其中,所述第一参考时间为所述测量信号在所述参考电路的所述激光驱动电路和所述信号处理电路中的传输时间;
43、根据所述第一参考时间和所述第二测量时间的差值,确定所述目标物体对应的飞行时间。
44、结合第二方面和上述实现方式,在某些可能的实现方式中,所述测量电路包括激光驱动电路、激光发射器、激光接收器、所述延时电路和信号处理电路;
45、所述延时电路的控制端与控制器连接,所述激光驱动电路的输出端分别与所述延时电路的输入端和所述激光发射器连接,所述激光接收器与所述延时电路的输入端连接,所述延时电路的输出端分别与所述信号处理电路的输入端和所述控制器连接。
46、结合第二方面和上述实现方式,在某些可能的实现方式中,所述延时电路包括延时模块和延时开关,所述延时模块的控制端和所述延时开关的控制端分别与所述控制器连接,所述延时模块的输入端分别与所述激光驱动电路的输出端和所述激光接收器连接,所述延时模块的输出端与所述延时开关的输入端连接,所述延时开关的第一输出端与所述信号处理电路的输入端连接,所述延时开关的第二输出端与所述控制器连接。
47、结合第二方面和上述实现方式,在某些可能的实现方式中,所述控制器,具体用于:
48、获取第三时间;其中,所述第三时间为所述测量电路发射的出射激光的最大脉冲宽度对应的时间间隔;
49、根据所述第三时间,确定所述延时电路的第二目标延时时间;其中,所述第二目标延时时间大于所述第三时间;
50、调整所述延时电路的延时时间为所述第二目标延时时间。
51、结合第二方面和上述实现方式,在某些可能的实现方式中,所述控制器,具体用于:
52、根据所述第二目标延时时间和所述第一测量时间的和值,确定第二参考时间;其中,所述第二参考时间为所述测量信号在所述参考电路和所述延时电路中的传输时间;
53、根据所述第二测量时间和所述第二参考时间的差值,确定所述目标物体对应的飞行时间。
54、第三方面,提供了一种激光雷达,包括上述第二方面或第二方面任意一种可能的实现方式中的激光雷达的飞行时间测量装置。
55、在本技术实施例中,延时电路设置在参考电路或测量电路中,延时电路用于对参考电路或测量电路中的测量信号进行延时,通过控制延时电路的延时时间,可以控制参考电路或测量电路中测量信号的延时时间,避免参考电路中的测量信号和测量电路中的测量信号重叠,使激光雷达能够分辨出参考电路和测量电路返回的测量信号,进而使激光雷达能够对近距离的目标物体的飞行时间进行测量,减小激光雷达的近距离盲区;通过获取测量信号在参考电路中的第一测量时间和测量信号在测量电路中的第二测量时间,第一测量时间为测量信号在参考电路的各个电路中的信号延时时间,并根据第一测量时间、第二测量时间和延时时间,确定目标物体对应的不包括参考电路中各个电路的延时时间的飞行时间,避免了参考电路中的各个电路的延时时间对目标物体对应的飞行时间的影响,有效提高激光雷达的测量准确度。
- 还没有人留言评论。精彩留言会获得点赞!