光谱激光雷达设备及测量方法与流程
本发明属于测绘遥感,尤其涉及一种光谱激光雷达设备及测量方法。
背景技术:
1、激光雷达技术作为一种快速、精确、高效的探测手段,因其有较强的获得距离信息能力,在日常生活有广泛的应用。光谱激光雷达通过探测多个光谱通道信号,可获得具有空间信息、距离信息和光谱信息的点云数据以及光谱图像数据。但目前本领域的相关技术并不成熟,如何获取具有空间信息、距离信息和光谱信息的点云数据以及光谱图像数据,是亟待解决的技术问题。
技术实现思路
1、本发明的目的在于提供一种光谱激光雷达设备及测量方法,旨在解决现有技术中的获取具有空间信息、光谱信息的点云数据以及光谱图像数据的技术问题。
2、为实现上述目的,本发明实施例提供的一种光谱激光雷达设备,包括旋转承载平台、设置在旋转承载平台上的若干个数据采集模块、与数据采集模块连接的数据处理模块和输出显示器。数据采集模块包括光谱激光发射器、棱镜和tof线阵图像传感器组成,光谱激光发射器发射多光谱激光,激光照射到测量物体上,物体反射光谱激光发射器所发出的光经过棱镜分成不同波长的反射光照射到tof线阵图像传感器,tof线阵图像传感器将采集到的数据传送到数据处理模块,数据处理模块与输出显示器连接。数据处理模块包括光谱图像处理模块和光谱激光雷达点云处理模块,光谱图像处理模块用于对反射光进行光谱图像处理,光谱激光雷达点云处理模块用于反射光进行光谱激光雷达点云处理。
3、进一步,光谱激光发射器由光谱激光器和发射光学镜头组成,发射光学镜头设置在光谱激光器的发射端。
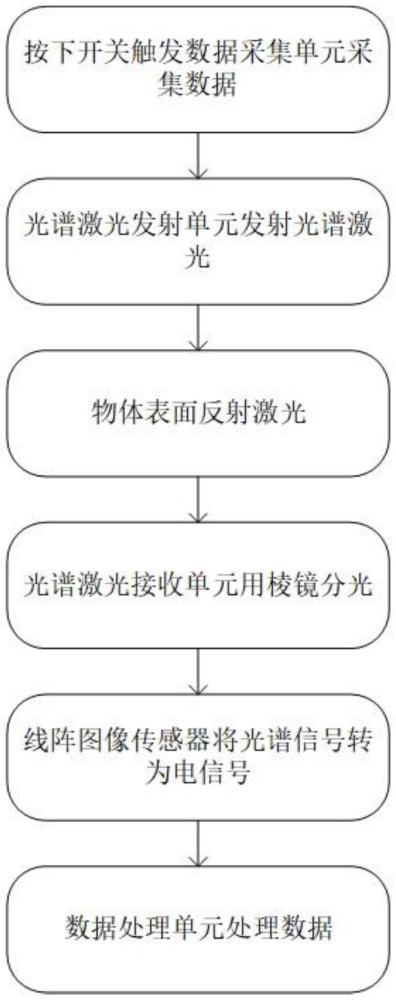
4、发明实施例提供的一种光谱激光雷达测量方法,采用光谱激光雷达设备,其特征在于:包括以下步骤:步骤一:工作人员携带光谱激光雷达设备对被测物体进行拍照,旋转承载平台可通过电机带动自动调节拍摄的角度,获得更大的拍摄范围。步骤二、光谱激光发射器发射激光,物体接收激光后进行反射,反射光束照射在棱镜上,棱镜进行分光,将反射光分成不同波长的反射光照射到tof线阵图像传感器,tof线阵图像传感器将采集的光谱图像和点云数据发送到数据处理模块。步骤三、数据处理模块对接收到的图像进行处理,之后将点云数据和光谱图像输送至输出显示器,输出结果。
5、进一步,步骤三具体包括光谱图像处理模块对接收到的图像进行光谱图像处理,进行归一化处理,然后平滑,接着基线校正,最后进行特征量提取,得到预处理光谱图像。光谱激光雷达点云处理模块对接收到的图像进行光谱激光点云处理,得到包含光谱信息的点云数据。将得到的点云数据和光谱图像输送至输出显示器,输出结果。
6、进一步,光谱激光点云处理具体包括采用了体素和统计滤波对点云进行了简化、去除了孤点,三维数据被直接分成三个一维数据,一维数据排成单独的矩阵,此外,应用了稀疏变换,并且为了下采样,还使用了傅立叶矩阵。之后,采用了正则化正交匹配追踪,重建数据。
7、进一步,光谱激光点云处理用运动畸变补偿、点云组帧、外参变化和滤波处理,运动畸变补偿用于去除激光雷达的运动畸变,滤波处理用于平滑三维点。
8、进一步,光谱图像处理模块使用psjn算法对光谱图像进行光谱重建。psjn算法采用公式其中lm为光谱图像的子样本,gi为ms传感器在波段i上的srf,λ为波长,l(λ)为指定波长的光谱图像的子样本。
9、本发明实施例提供的光谱激光雷达设备及测量方法中的上述一个或多个技术方案至少具有如下技术效果之一:通过多个光谱激光发射器、棱镜、tof线阵图像传感器和一个旋转承载平台,获取被测物体的光谱图像数据和点云数据,其经过光谱图像处理与光谱激光雷达点云处理,最终得到物体的光谱信息与结构信息。
技术特征:
1.一种光谱激光雷达设备,其特征在于:包括旋转承载平台、设置在所述旋转承载平台上的若干个数据采集模块、与所述数据采集模块连接的数据处理模块和输出显示器;所述数据采集模块包括光谱激光发射器、棱镜和tof线阵图像传感器组成,光谱激光发射器发射多光谱激光,激光照射到测量物体上,物体反射所述光谱激光发射器所发出的光经过棱镜分成不同波长的反射光照射到所述tof线阵图像传感器,所述tof线阵图像传感器将采集到的数据传送到所述数据处理模块,所述数据处理模块与所述输出显示器连接;所述数据处理模块包括光谱图像处理模块和光谱激光雷达点云处理模块,所述光谱图像处理模块用于对反射光进行光谱图像处理,所述光谱激光雷达点云处理模块用于反射光进行光谱激光雷达点云处理。
2.根据权利要求1所述的光谱激光雷达设备,其特征在于:所述光谱激光发射器由光谱激光器和发射光学镜头组成,所述发射光学镜头设置在所述光谱激光器的发射端。
3.一种光谱激光雷达测量方法,采用权利要求1~2任一项所述光谱激光雷达设备,其特征在于:包括以下步骤:步骤一:工作人员携带所述光谱激光雷达设备对被测物体进行拍照,所述旋转承载平台可通过电机带动自动调节拍摄的角度,获得更大的拍摄范围;步骤二、光谱激光发射器发射激光,物体接收激光后进行反射,反射光束照射在所述棱镜上,所述棱镜进行分光,将反射光分成不同波长的反射光照射到所述tof线阵图像传感器,所述tof线阵图像传感器将采集的光谱图像和点云数据发送到所述数据处理模块;步骤三、所述数据处理模块对接收到的图像进行处理,之后将点云数据和光谱图像输送至所述输出显示器,输出结果。
4.根据权利要求3所述的光谱激光雷达测量方法,其特征在于:所述步骤三具体包括所述光谱图像处理模块对接收到的图像进行光谱图像处理,进行归一化处理,然后平滑,接着基线校正,最后进行特征量提取,得到预处理光谱图像;所述光谱激光雷达点云处理模块对接收到的图像进行光谱激光点云处理,得到包含光谱信息的点云数据;将得到的点云数据和光谱图像输送至输出显示器,输出结果。
5.根据权利要求4所述的光谱激光雷达测量方法,其特征在于:所述光谱激光点云处理具体包括采用了体素和统计滤波对点云进行了简化、去除了孤点,三维数据被直接分成三个一维数据,一维数据排成单独的矩阵,此外,应用了稀疏变换,并且为了下采样,还使用了傅立叶矩阵;之后,采用了正则化正交匹配追踪,重建数据。
6.根据权利要求5所述的光谱激光雷达测量方法,其特征在于:所述光谱激光点云处理用运动畸变补偿、点云组帧、外参变化和滤波处理,运动畸变补偿用于去除激光雷达的运动畸变,滤波处理用于平滑三维点。
7.根据权利要求4所述的光谱激光雷达测量方法,其特征在于:所述光谱图像处理模块使用psjn算法对光谱图像进行光谱重建;psjn算法采用公式其中lm为光谱图像的子样本,gi为ms传感器在波段i上的srf,λ为波长,l(λ)为指定波长的光谱图像的子样本。
技术总结
本发明属于测绘遥感技术领域,尤其涉及一种光谱激光雷达设备及测量方法,通过多个光谱激光发射单元、棱镜、线阵图像传感器和一个旋转承载平台,由发射单元发射广谱激光,激光照射到物体上,物体反射光经过棱镜分光到达TOF线阵图像传感器,TOF线阵图像传感器将采集到的数据传送到数据处理模块,数据处理后得到被测物体的光谱图像数据和点云数据,其经过光谱图像处理与光谱激光雷达点云处理,最终同时得到物体的光谱信息与场景结构信息。
技术研发人员:曾一龙
受保护的技术使用者:四维传感技术(深圳)有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!