基于机器学习的捷联惯导系统阻尼状态切换方法及系统与流程
本发明涉及惯性导航,具体地指一种基于机器学习的捷联惯导系统阻尼状态切换方法及系统。
背景技术:
1、捷联惯导系统作为一种集自主性、隐蔽性等优点于一体的导航设备,直接将陀螺仪和加速度计与载体固连,通过虚拟数学平台进行导航解算,得到实时的导航信息。当前各种导航手段的应用中存在易受干扰、暴露目标等限制性问题,例如无线电导航只能在水面以及陆地环境中工作;声学导航能接收外部声学信号,以此提供速度、位置信息,但受到作用范围的限制;地球物理场导航受制于测量元件的精度和稳定性;而捷联惯导系统最大的优势在于全导航信息输出以及不受环境和人为因素的干扰,这些特点决定了它在航空、航天、航海等领域不可替代的地位。但是在长航时导航过程中,捷联惯导系统由于器件误差的存在,其输出会包含舒勒振荡误差、傅科振荡误差和地球振荡误差,振荡性误差的存在严重制约了捷联惯导系统的导航精度。常规情况下,捷联惯导系统作为临界稳定系统,可以通过引入校正环节进行极点再匹配,抑制振荡性误差,改善系统动态性能,这也是阻尼网络工作的基本原理。目前,阻尼技术可以依据是否引入外参考速度信息,分为内水平阻尼技术和外水平阻尼技术。
2、内水平阻尼技术虽然可以有效衰减舒勒振荡误差,但是在载体机动时会破坏舒勒平衡条件,带来超调误差,为克服这种情况,通常引入外参考速度信息进行误差校正,这也是当前水下导航的常用手段。引入外参考速度能够有效补偿载体加速度对捷联惯导系统的影响。但是外参考速度同样存在误差,这必然会引入新的输入性误差。为保证捷联惯导系统的导航精度与稳定性,必须要进行阻尼状态的动态调整。因此,开展捷联惯导系统的阻尼状态切换技术研究是非常重要的。
3、综上所述,现有技术存在的问题是:传统外水平阻尼技术虽然降低了载体加速度带来的影响,但是当多普勒计程仪提供的外参考速度存在误差时,比如:海况变化、船舶机动转弯等情况,将给捷联惯导系统带来新的超调误差,影响系统导航精度。
4、解决以上问题及缺陷的难度为:多普勒计程仪输出固有的外参考速度误差引起的系统超调误差受到环境和载体本身的影响,无法从原理上进行消除。
5、解决以上问题及缺陷的意义为:当多普勒计程仪输出存在外参考误差时,系统超调误差的持续时间比较长,这一阶段中导航信息的准确性较低,在使用中会产生较大的影响。因此,降低测速误差对捷联惯导系统精度的影响可以有效提升导航信息的准确性。
技术实现思路
1、针对现有存在的问题,本发明旨在提供一种基于机器学习的捷联惯导系统阻尼状态切换方法,当水面舰船或水下潜器受到海况影响、转弯机动,多普勒计程仪存在测速误差,影响外水平阻尼效果时,实现系统阻尼状态的自动切换,抑制超调误差,增强水面舰船或水下潜器的长航时导航能力。该方法可以有效降低外参考速度误差引起的长时间超调误差,并在检测到外参考速度误差时进行阻尼状态的自动切换,切换时采用的渐变阻尼方法可以同时避免直接切换带来的超调误差。
2、本发明涉及一种基于机器学习的捷联惯导系统阻尼状态切换方法,包括步骤如下:
3、步骤1:设计一种阻尼参数可调的二阶水平阻尼网络,根据系统闭环稳定性原理,得到阻尼网络的阻尼参数和自适应参数的离散数据分布,结合三次样条函数插值方法拟合阻尼参数和自适应参数之间的关系,实现实时的阻尼参数调整的目的;
4、步骤2:将设计好的二阶水平阻尼网络进行双线性变换处理,并将处理后的二阶水平阻尼网络配置到捷联惯导系统导航解算的速度更新过程中,以此实现捷联惯导系统的外水平阻尼,达到衰减捷联惯导系统振荡误差的作用;
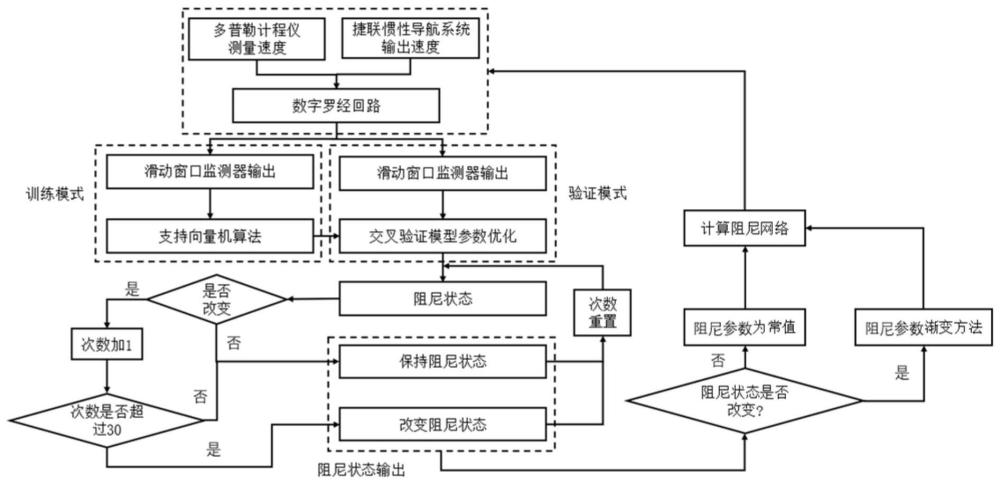
5、步骤3:将多普勒计程仪输出的水面舰船或水下潜器的外参考速度输入到捷联惯导系统的数字罗经回路中,实现多普勒计程仪输出的水面舰船或水下潜器的外参考速度实时降噪,结合窗口检测原理,计算多普勒计程仪输出的等效外参考速度误差变化率;
6、步骤4:结合水面舰船或水下潜器的转弯时机,预先收集一段包含水面舰船或水下潜器的外参考速度误差的多普勒计程仪输出速度数据和捷联惯导系统输出的速度数据,计算联惯导系统的阻尼状态数据;
7、步骤5:将多普勒计程仪输出的等效外参考速度误差变化率和捷联惯导系统的阻尼状态数据进行支持向量机模型训练,输入样本为等效外参考速度误差变化率,输出样本为捷联惯导系统的阻尼状态,同时采用交叉验证方法,寻求支持向量机模型最优的惩罚因子和核函数系数,形成训练好的支持向量机模型;
8、步骤6:将实际计算得到的等效外参考速度误差变化率输入训练好的支持向量机模型,实现捷联惯导系统的阻尼状态切换,同时采用阻尼渐变方法,降低阻尼切换产生的超调误差。
9、本发明的有益效果:
10、本发明主要针对多普勒计程仪存在测量误差,导致处于外水平阻尼状态的水面舰船或水下潜器产生超调误差。水面舰船或水下潜器在长航时过程中,系统长时间属于外水平阻尼状态,当多普勒计程仪存在测量误差时,容易破坏系统稳定条件,产生超调误差,影响水面舰船或水下潜器正常航行。因此,本发明为了降低外参考速度误差对捷联惯导系统的影响,提出利用机器学习中的支持向量机方法结合窗口检测器对等效外参考速度误差变化率进行学习,以此进行阻尼状态的控制与识别。同时为了降低多普勒计程仪的测量噪声,提出在捷联惯导系统阻尼回路中加入数字罗经回路对外参考速度进行降噪处理。最后,采用渐变阻尼方法降低阻尼切换带来的超调误差。本发明在外参考速度误差长期保持较大幅度的场合具有很强的现实意义和工程研究价值。
技术特征:
1.一种基于机器学习的捷联惯导系统阻尼状态切换方法,其特征在于:它包括如下步骤:
2.根据权利要求1所述的基于机器学习的捷联惯导系统阻尼状态切换方法,其特征在于:所述步骤1中设计一种阻尼参数可调的二阶水平阻尼网络,根据系统闭环稳定性原理,得到阻尼网络的阻尼参数和自适应参数的离散数据分布,结合三次样条函数插值方法拟合阻尼参数和自适应参数之间的关系的方法为:
3.根据权利要求1或2所述的基于机器学习的捷联惯导系统阻尼状态切换方法,其特征在于:所述步骤2中设计好的二阶水平阻尼网络进行双线性变换处理,并将处理后的二阶水平阻尼网络配置到捷联惯导系统导航解算的速度更新过程中,以此实现外水平阻尼,达到衰减捷联惯导系统振荡误差的作用的具体方法为:
4.根据权利要求3所述的基于机器学习的捷联惯导系统阻尼状态切换方法,其特征在于:所述步骤3中将多普勒计程仪输出的水面舰船或水下潜器的外参考速度输入到捷联惯导系统的数字罗经回路中,实现外参考速度实时降噪,结合窗口检测原理,计算多普勒计程仪输出的等效外参考速度误差变化率的具体方法为:
5.根据权利要求4所述的基于机器学习的捷联惯导系统阻尼状态切换方法,其特征在于:所述步骤4中结合水面舰船或水下潜器转弯时机,预先收集一段包含水面舰船或水下潜器的外参考速度误差的多普勒计程仪输出数据和捷联惯导系统输出的速度数据,计算联惯导系统的阻尼状态数据的具体方法为:
6.根据权利要求5所述的基于机器学习的捷联惯导系统阻尼状态切换方法,其特征在于:所述步骤5中将多普勒计程仪输出的等效外参考速度误差变化率和捷联惯导系统的阻尼状态数据进行支持向量机模型训练,输入样本为等效外参考速度误差变化率,输出样本为捷联惯导系统的阻尼状态,同时采用交叉验证方法,寻求支持向量机模型最优的惩罚因子和核函数系数,形成训练好的支持向量机模型的具体方法为:
7.根据权利要求6所述的基于机器学习的捷联惯导系统阻尼状态切换方法,其特征在于:所述步骤6中的将实际计算得到的等效外参考速度误差变化率输入训练好的支持向量机模型,实现阻尼状态切换,同时采用阻尼渐变方法,降低阻尼切换产生的超调误差具体方法为:
8.一种基于机器学习的捷联惯导系统阻尼状态切换系统,其特征在于:它包括阻尼网络设计模块、外水平阻尼实现模块、等效外参考速度误差变化率计算模块、阻尼状态计算模块、数据训练模块和阻尼状态切换模块;
9.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于:所述计算机程序被处理器执行时实现如权利要求1所述方法的步骤。
技术总结
本发明公开了一种基于机器学习的捷联惯导系统阻尼状态切换方法,本发明基于传统外水平阻尼技术,在此基础上利用外参考速度的误差变化调整阻尼状态,提取外参考速度误差过程中,采用数字罗经回路实现外参考速度的降噪并凸显存在外参考速度误差的时间段,通过支持向量机方法对存在外参考速度误差的时间段进行预先训练,实现水面舰船或水下潜器实际航行中阻尼状态的自动切换,同时结合阻尼渐变方法降低阻尼状态切换的带来的影响。
技术研发人员:朱九鹏,徐妍,闫杰,覃方君,李安,陈燕山,黄华,程晓圆
受保护的技术使用者:中国人民解放军92453部队
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!