用于基于车载雷达检测道路边缘的方法和系统与流程
本发明涉及雷达信号处理,尤其是涉及一种用于基于车载雷达检测道路边缘的方法,一种用于基于车载雷达检测道路边缘的系统,一种包括所述系统的车辆,以及一种计算机程序产品,其用于至少辅助地实现根据本发明所述的方法的步骤。
背景技术:
1、随着高级别的自动驾驶系统和/或辅助驾驶系统的应用,对车载雷达的检测结果的准确度和检测范围的要求越来越高。车载雷达不仅需要检测道路上的常规障碍物如车辆、行人等,而且需要检测道路边缘,例如路边护栏、路边隔离带、路边障碍物等。基于所述探测的结果,自动驾驶系统和/或辅助驾驶系统能够执行相应的车辆控制功能。
2、然而,在车载雷达的实际使用过程中,雷达接收器经常会接收到与当前行车道的道路边缘无关的干扰回波,例如由相邻车道的障碍物或对向车道的车辆反射的干扰回波,从而对车载雷达的探测结果产生干扰。
3、因此,如何利用车载雷达快速且精确地检测道路边缘成为目前需要解决的技术难题。
技术实现思路
1、本发明的目的在于提供一种用于基于车载雷达检测道路边缘的方法,一种用于基于车载雷达检测道路边缘的系统,一种包括所述系统的车辆,以及一种计算机程序产品,以至少部分地解决现有技术中的问题。
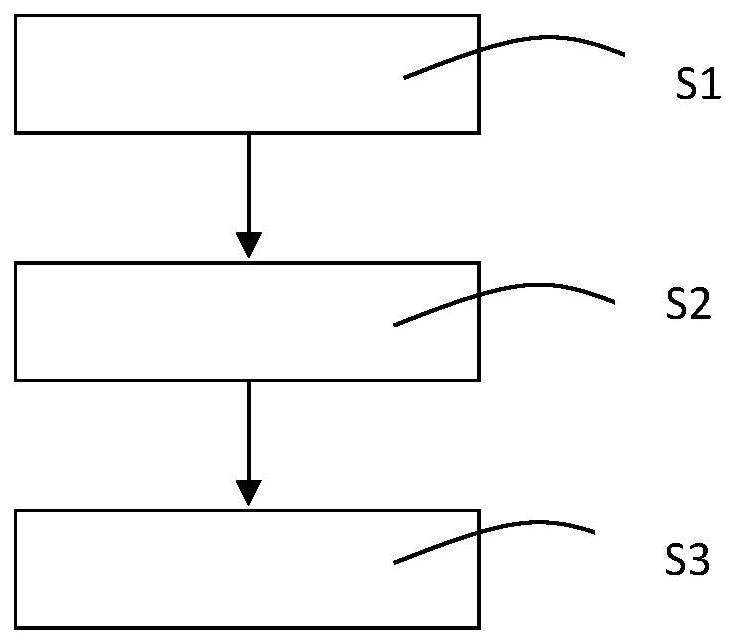
2、根据本发明的第一方面,提供了一种用于基于车载雷达检测道路边缘的方法,所述方法包括:
3、-步骤s1:从通过车载雷达采集的点云数据中筛选出静态点云数据;
4、-步骤s2:统计在各个点云区间中的静态点云数据量;和
5、-步骤s3:基于所统计的静态点云数据量评估相应的点云区间中静态点云数据的置信度,并基于所述置信度分别处理相应的点云区间中的静态点云数据,用以获取关于道路边缘的检测结果。
6、本发明的核心构思在于:基于车载雷达采集的点云数据通过直方图投影法快速且精确地拟合出道路边缘的轮廓线,而不依赖具有高置信度的特定基准点,从而极大地提高车载雷达的检测精度和检测速度,且节省所耗费的算力。
7、根据本发明的一个可选实施例,可以利用所述点云数据的水平角度余弦值cosθ与所述点云数据的多普勒速度vd除以车辆行驶速度vh的负数的差值来筛选所述点云数据中的静态点云数据。
8、根据本发明的另一可选实施例,所述道路边缘例如包括路边护栏、路边围墙、路边隔离带、路边障碍物和/或施工路段围栏等。
9、根据本发明的另一可选实施例,所述步骤s3可以包括:
10、-步骤s31:比较各个点云区间中的静态点云数据量与目标阈值的大小关系,用以评估各个点云区间中静态点云数据的置信度;
11、-步骤s32:如果所述点云区间中的静态点云数据量大于等于目标阈值,则基于相应的点云区间中的静态点云数据通过随机采样一致性算法和卡曼滤波算法获取关于道路边缘的检测结果;和
12、-步骤s33:如果所述点云区间中的静态点云数据量小于目标阈值,则基于相应的点云区间中的静态点云数据通过卡曼滤波算法获取关于道路边缘的检测结果。
13、根据本发明的另一可选实施例,所述步骤s32可以包括:
14、-步骤s321:如果所述点云区间中的静态点云数据量大于等于预设数量阈值,则从相应的点云区间中的静态点云数据选取雷达回波强度最大的两个静态点云数据用于计算第一直线;
15、-步骤s322:基于相应的点云区间中的其他静态点云数据至所述第一直线的距离,将所述其他静态点云数据划分成离群点和群内点;
16、-步骤s323:基于所述群内点通过最小二乘法拟合道路边缘的轮廓线;和
17、-步骤s324:通过卡曼滤波算法对所拟合的轮廓线进行跟踪滤波,由此获取关于道路边缘的检测结果。
18、根据本发明的另一可选实施例,所述方法还可以包括:
19、-步骤s4:基于所采集的点云数据中的其他点云数据与所求取的道路边缘的轮廓线的位置关系,确定并抑制所述其他点云数据中的干扰数据。
20、根据本发明的另一可选实施例,可以对横向位置处于所获取的道路边缘的轮廓线的外侧的干扰数据进行抑制,其中,所述干扰数据包括由相邻车道的障碍物和/或车辆反射产生的镜像幻影数据。
21、根据本发明的第二方面,提供了一种用于基于车载雷达检测道路边缘的系统,其中,所述系统包括以下构件:
22、-车载雷达,其被配置为向扫描区域发送雷达波和接收来自所述扫描区域的雷达回波;和
23、-控制单元,其被配置为执行根据本发明的方法。
24、根据本发明的另一可选实施例,所述车载雷达可以包括毫米波雷达。
25、根据本发明的第三方面,提供了一种车辆,所述车辆包括根据本发明的系统。
26、根据本发明的第四方面,提供了一种计算机程序产品、例如计算机可读的程序载体,包含或存储有计算机程序指令,所述计算机程序指令被处理器执行时至少辅助地实现根据本发明的方法的步骤。
技术特征:
1.一种用于基于车载雷达检测道路边缘的方法,所述方法包括:
2.根据权利要求1所述的方法,其中,利用所述点云数据的水平角度余弦值cosθ与所述点云数据的多普勒速度vd除以车辆行驶速度vh的负数的差值来筛选所述点云数据中的静态点云数据。
3.根据以上权利要求中任一项所述的方法,其中,所述步骤s3包括:
4.根据以上权利要求中任一项所述的方法,其中,所述步骤s32包括:
5.根据以上权利要求中任一项所述的方法,其中,所述方法还包括:
6.根据以上权利要求中任一项所述的方法,其中,对横向位置处于所获取的道路边缘的轮廓线的外侧的干扰数据进行抑制,其中,所述干扰数据包括由相邻车道的障碍物和/或车辆反射产生的镜像幻影数据。
7.根据以上权利要求中任一项所述的方法,其中,所述道路边缘包括路边护栏、路边围墙、路边隔离带、路边障碍物和/或施工路段围栏。
8.一种用于基于车载雷达检测道路边缘的系统(10),其中,所述系统(10)包括以下构件:
9.根据权利要求8所述的系统(10),其中,所述车载雷达(11)包括毫米波雷达。
10.一种车辆,所述车辆包括根据权利要求8或9所述的系统(10)。
11.一种计算机程序产品、例如计算机可读的程序载体,包含或存储有计算机程序指令,所述计算机程序指令被处理器执行时至少辅助地实现根据以上权利要求1至7中任一项所述的方法的步骤。
技术总结
本发明涉及一种用于基于车载雷达检测道路边缘的方法,其包括:从通过车载雷达(11)采集的点云数据中筛选出静态点云数据(S1);统计在各个点云区间中的静态点云数据量(S2);基于所统计的静态点云数据量评估相应的点云区间中静态点云数据的置信度,并基于所述置信度分别处理相应的点云区间中的静态点云数据,用以获取关于道路边缘的检测结果(S3)。本发明还涉及用于基于车载雷达检测道路边缘的系统,车辆和计算机程序产品。根据本发明,基于车载雷达采集的点云数据通过直方图投影法快速且精确地拟合出道路边缘的轮廓线,而不依赖具有高置信度的特定基准点,从而极大地提高车载雷达的检测精度和检测速度,且节省所耗费的算力。
技术研发人员:朱俊
受保护的技术使用者:梅赛德斯-奔驰集团股份公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!