飞行器定位方法、装置及飞行器与流程
本公开实施例涉及定位,更具体地,涉及飞行器定位方法、装置及飞行器。
背景技术:
1、目前,飞行器定点投放物品在物流配送和应急救援等方面得到了广泛应用。飞行器定位方法有手动控制定位和自动控制定位两种方式。对于手动控制定位方式,如果操作手和飞行器之间的图像传输链路被干扰或者存在延迟,则会导致操作手无法及时对飞行器进行控制,从而降低定位精度,无法准确定位目标部位。对于自动控制定位的方式,飞行器的航高和吊舱相机的视场对定位精度直接相关,若两者中任一者在定位过程中出现问题,例如,飞行器的航高过高,相机的视场为较大视场的情况下,会严重影响定位的精度。
技术实现思路
1、本公开的一个目的是提供一种飞行器定位的新的技术方案。
2、根据本公开的第一方面,提供了飞行器定位方法的一个实施例,包括:
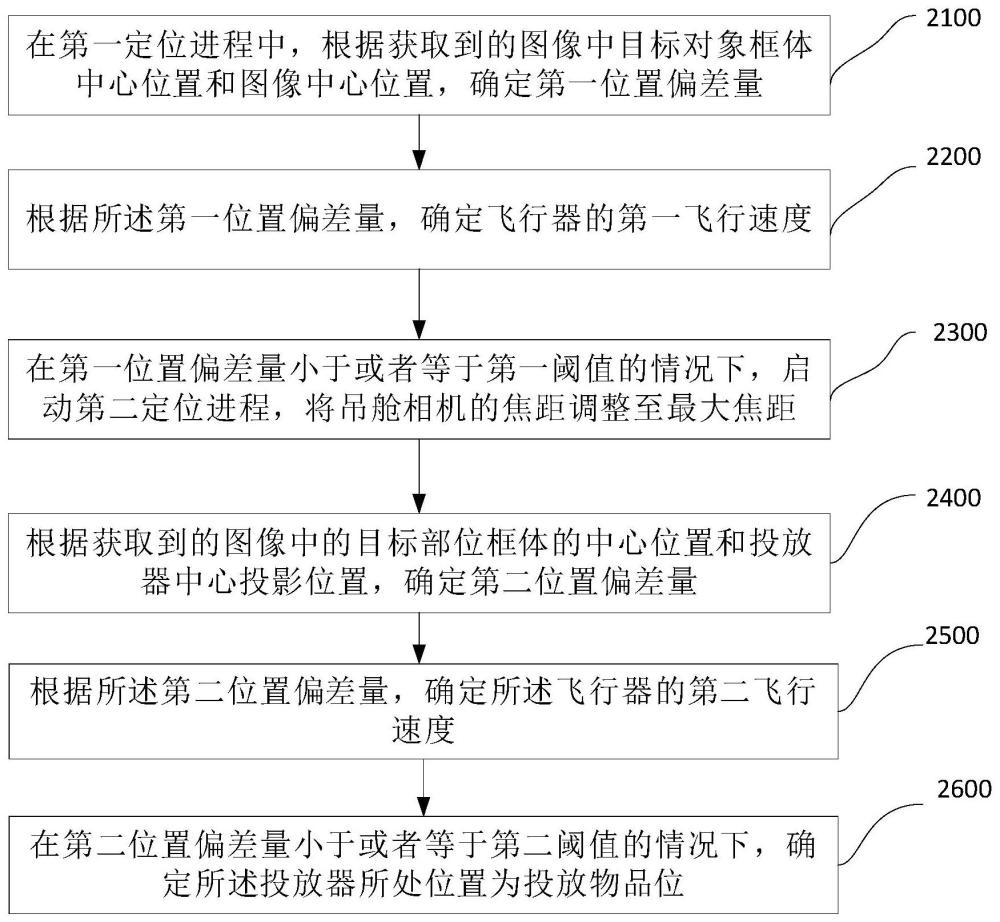
3、在第一定位进程中,根据获取到的图像中目标对象框体中心位置和图像中心位置,确定第一位置偏差量;
4、根据所述第一位置偏差量,确定所述飞行器的第一飞行速度;
5、在所述第一位置偏差量小于或者等于第一阈值的情况下,启动第二定位进程,将吊舱相机的焦距调整至最大焦距;
6、根据获取到的图像中的目标部位框体的中心位置和投放器中心投影位置,确定第二位置偏差量;
7、根据所述第二位置偏差量,确定所述飞行器的第二飞行速度;
8、在所述第二位置偏差量小于或者等于第二阈值的情况下,确定所述飞行器到达目标位置。
9、可选地,述根据获取到的图像中的目标部位框体的中心位置和投放器中心投影位置,确定第二位置偏差量,包括:
10、根据所述最大焦距和所述投放器中心相对于所述吊舱相机的安装位置偏差量,确定所述投放器中心投影位置;
11、识别所述图像中的目标部位,得到目标部位框体;
12、提取所述投放部位框体中设定形状的所述目标部位;
13、根据所述投放器中心投影位置和所述目标部位的中心位置,确定所述第二位置偏差量。
14、可选地,所述第二位置偏差量包括对应于宽度方向上的第一宽度偏差量和对应于高度方向上的第一高度偏差量,所述在所述第二位置偏差量小于或者等于第二阈值的情况下,确定所述飞行器到达目标位置,包括:
15、在所述第一宽度偏差量和所述第一高度偏差量的平方差小于或者等于第三阈值的情况下,获取第一待判定视频流;
16、对于所述第一待判定视频流中每一待判定图像,根据所述待判定图像中目标部位中心位置和投放器中心投影位置,确定所述待判定图像在高度方向上的第二高度偏差量和在宽度方向的第二宽度偏差量,得到多个第二宽度偏差量和多个第二高度偏差量;
17、在所述多个第二高度偏差量和所述多个第二宽度偏差量的标准差小于或者等于第四阈值的情况下,确定所述飞行器到达目标位置。
18、可选地,在所述第一定位进程中,所述方法还包括:
19、将当前待识别图像的上一帧已识别图像的目标对象框体作为初始框体;
20、根据预设的多个尺度缩放比例,对所述初始框体进行缩放,得到对应多个尺度缩放比例的多个待选框体;
21、根据所述待识别图像中每个所述待选框体对应的目标搜索图像的响应值,确定所述待识别图像的目标对象框体。
22、可选地,所述根据所述待识别图像中每一所述待选框体对应的目标搜索图像的响应值,确定所述待识别图像的目标对象框体,包括:
23、对于每一待选框体,按照设定的放大倍数放大,得到多个目标搜索框体;
24、从所述待识别图像中提取对应每一所述目标搜索框体的目标搜索图像,得到多个目标搜索图像;
25、对每一所述目标搜索图像进行特征提取和响应值计算,确定所述目标搜索图像对应的响应值,得到多个响应值;
26、将所述多个响应值中的最大响应值对应的待选框体作为所述待识别图像的目标对象框体。
27、可选地,在启动第一定位进程之前,所述方法还包括:
28、识别获取到的图像是否存在目标图像;其中,所述目标图像为所识别到的目标对象框体的像素坐标和所识别到的目标部位框体的像素坐标满足设定位置关系的图像;
29、在存在目标图像的情况下,根据所述目标对象框体的像素坐标和坐标转换关系,确定所述目标对象框体在大地坐标系下的位置坐标;
30、根据所述目标对象框体在大地坐标系下的位置坐标,预测第二待判定视频流中每一待判定图像中目标对象所处的目标区域;
31、识别所述待判定图像的所述目标区域内是否存在目标对象;
32、在所述第二待判定视频流中对应第一判定结果的第一图像总概率和对应第二判定结果的第二图像总概率之和大于或者等于设定概率阈值的情况下,确定所述目标对象为真实目标对象;其中,所述第一判定结果为所述待判定图像的所述目标区域内存在目标对象,所述第二判定结果为所述待判定图像的所述目标区域内不存在目标对象。
33、可选地,所述根据所述目标对象框体的像素坐标和坐标转换关系,确定所述目标对象框体在大地坐标系下的位置坐标,包括:
34、根据第一坐标转换关系,将所述目标对象框体的像素坐标转化为在相机坐标系下的位置坐标;
35、根据第二坐标转换关系,将所述目标对象框体在相机坐标系下的坐标转换为在机体坐标系下的坐标;
36、根据第三坐标转换关系,将所述目标对象框体在机体坐标系下的坐标转换为在大地坐标系下的位置坐标。
37、可选地,所述根据所述目标对象框体在大地坐标系下的位置坐标,预测第二待判定视频流中每一待判定图像中目标对象框体所处的目标区域,包括:
38、对于每一待判定图像,根据所述目标对象框体在大地坐标系下的位置坐标和所述待判定图像对应的所述飞行器在大地坐标系下的位置坐标,预测所述待判定图像中目标对象所处的目标区域。
39、根据本公开的第二方面,提供了飞行器定位装置的一个实施例,包括:
40、位置偏差量确定模块,用于在第一定位进程中,根据获取到的图像中目标对象框体中心位置和图像中心位置,确定第一位置偏差量;
41、飞行速度确定模块,用于根据所述第一位置偏差量,确定所述飞行器的第一飞行速度;
42、调焦模块,用于在所述第一位置偏差量小于或者等于第一阈值的情况下,启动第二定位进程,将吊舱相机的焦距调整至最大焦距;
43、所述位置偏差量确定模块用于根据获取到的图像中的目标部位框体的中心位置和投放器中心投影位置,确定第二位置偏差量;
44、所述飞行速度确定模块用于根据所述第二位置偏差量,确定所述飞行器的第二飞行速度;
45、目标位置确定模块用于在所述第二位置偏差量小于或者等于第二阈值的情况下,确定所述飞行器到达目标位置。
46、根据本公开的第三方面,提供了飞行器定位装置的一个实施例,包括处理器和存储器,所述存储器用于存储计算机程序,所述计算机程序用于控制所述处理器执行本公开的第一方面所述的任一项定位方法。
47、根据本公开的第四方面,提供了飞行器的一个实施例,包括:吊舱相机,所述吊舱相机用于采集图像,并将所采集到的图像发送至飞行器定位装置;如第二方面或者第三方面所述的飞行器定位装置。
48、根据本技术实施例,通过在第一定位进程中,根据获取到的图像中目标对象框体中心位置和图像中心位置,确定第一位置偏差量;根据所述第一位置偏差量,确定所述飞行器的第一飞行速度;在所述第一位置偏差量小于或者等于第一阈值的情况下,启动第二定位进程,将吊舱相机的焦距调整至最大焦距;根据获取到的图像中的目标部位框体的中心位置和投放器中心投影位置,确定第二位置偏差量;根据所述第二位置偏差量,确定所述飞行器的第二飞行速度;在所述第二位置偏差量小于或者等于第二阈值的情况下,确定所述飞行器到达目标位置,可以提高飞行器定位的精准度,进而提高救援物品、配送物品等的投放精度。
49、通过以下参照附图对本说明书的示例性实施例的详细描述,本说明书的其它特征及其优点将会变得清楚。
- 还没有人留言评论。精彩留言会获得点赞!