一种基于无人机的火星表面测绘重建系统及方法与流程
本发明属于航天,尤其涉及一种基于无人机的火星表面测绘重建系统及方法。
背景技术:
1、近年来,火星探测成为各国航天领域关注的热点。2020年7月,中国、美国、阿联酋分别向火星发射了太空探测器。2021年2月,美国的“毅力”号火星车成功在火星着陆;2021年5月,我国第一辆火星车“祝融”号成功驶上火星表面,开始巡视探测。
2、获取火星表面三维地形数据是火星探测中的一项重要内容,也是开展其它科学研究的基础。高精度三维地形数据不仅能够帮助火星探测器着陆选址,辅助火星车行进路线规划和视觉导航,而且可以进行火星地质学研究。诸多机构对火星地形摄影测量的理论方法和应用进行了研究。1996年,美国发射“火星全球勘察者”在轨飞行器,通过对moc线阵相机与激光测高数据的联合处理,生成了分辨率介于200-300m的火星全球地形数据。欧空局火星快车探测器搭载hrsc测绘相机,可同时获取不同角度的全色与多光谱图像,其生成的火星全球高分辨率地形数据,部分区域分辨率可达20-50m。
3、这些研究采用的主要方式为火星在轨飞行器,其主要优点为覆盖面积广,但存在三维地形分辨率不高的问题。随着无人机技术的发展,采用无人机进行地形测绘,成为地球上常用的一种测绘方式,并发展为一种成熟的商业模式,该方式不仅可以达到较大的覆盖面积,而且生成的三维地形分辨率可大大提升,基本可达到厘米级。
4、得益于nasa的火星无人机“机智号”的成功飞行经验,国内外越来越多的组织机构开始关注火星无人机相关技术的研究,未来采用火星无人机进行火星地形测绘与三维重建成为可能。现有的无人机地形测绘和三维重建系统用于火星时存在诸多的限制,例如不能采用gps或北斗系统进行精确定位,无人机无法进行精确的飞行控制和定轨飞行;无法通过人工方式布置像控点;三维重建算法需要占用较大的计算资源,需要设计适用于火星表面长期稳定运行的专用计算设备;火星地形多类似于地球表面的沙漠和隔壁,影像纹理信息相对贫乏,影像匹配难度大等等。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提供了一种基于无人机的火星表面测绘重建系统及方法,大大提高火星表面测绘精度,获取的火星表面图像分辨率理论上可达厘米级,无人机能在指定的时间及指定的目标区域执行测绘任务,提高火星表面测绘灵活性。
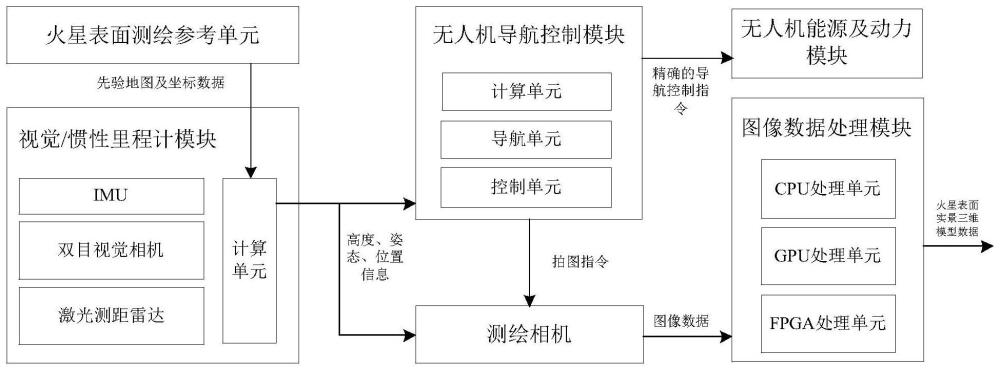
2、本发明目的通过以下技术方案予以实现:一种基于无人机的火星表面测绘重建系统,包括:火星表面测绘参考单元、视觉/惯性里程计模块、无人机导航控制模块、测绘相机、无人机能源及动力模块和图像数据处理模块;其中,所述火星表面测绘参考单元:提供火星先验地图信息及无人机火星位置坐标数据给所述视觉/惯性里程计模块;所述视觉/惯性里程计模块:接收火星先验地图信息及无人机火星位置坐标数据,采集飞行数据,对飞行数据进行处理得到处理后的飞行数据,将处理后的飞行数据和火星先验地图信息及无人机火星位置坐标数据进行匹配得到无人机的准确高度、姿态和位置信息,将无人机的准确高度、姿态和位置信息传输给所述无人机导航控制模块和所述测绘相机;所述无人机导航控制模块:接收无人机的准确高度、姿态和位置信息,根据设定的测绘区域规划无人机飞行路径,将无人机的准确高度、姿态和位置信息进行处理得到导航数据,根据导航数据和无人机飞行路径得到导航控制指令及拍图指令,将导航控制指令传输给所述无人机能源及动力模块,将拍图指令传输给所述测绘相机;所述无人机能源及动力模块:接收导航控制指令,根据导航控制指令执行飞行任务;所述测绘相机:接收拍图指令和无人机的准确高度、姿态和位置信息,根据拍图指令进行测绘作业得到图像,将无人机的准确高度、姿态和位置信息匹配到图像中得到图像数据,将图像数据传输给所述图像数据处理模块;所述图像数据处理模块:接收图像数据,根据图像数据通过三维重建计算,生成火星表面的实景三维模型。
3、上述基于无人机的火星表面测绘重建系统中,所述视觉/惯性里程计模块包括imu、双目视觉相机、激光测距雷达和计算单元;其中,所述imu:采集无人机的飞行速度、俯仰角度、加速度的数据,将无人机的飞行速度、俯仰角度、加速度的数据传输给所述计算单元;所述激光测距雷达:采集无人机的飞行高度数据,将无人机的飞行高度数据传输给所述计算单元;所述双目视觉相机:采集飞行过程中左右两个不同视场的图像数据,将图像数据传输给所述计算单元;所述计算单元:接收火星先验地图信息及无人机火星位置坐标数据、无人机的飞行速度、俯仰角度及加速度、飞行高度数据和图像数据,对无人机的飞行速度、俯仰角度及加速度、飞行高度数据和图像数据处理得到处理后的飞行数据,将处理后的飞行数据和火星先验地图信息及无人机火星位置坐标数据进行匹配得到无人机的准确高度、姿态和位置信息,将无人机的准确高度、姿态和位置信息传输给所述无人机导航控制模块和所述测绘相机。
4、上述基于无人机的火星表面测绘重建系统中,对无人机的飞行速度、俯仰角度及加速度、飞行高度数据和图像数据处理得到处理后的飞行数据包括:对无人机的飞行速度、俯仰角度及加速度、飞行高度数据进行采样和滤波处理;对图像数据进行图像分割、矫正、特征提取的处理。
5、上述基于无人机的火星表面测绘重建系统中,所述飞行数据包括无人机的飞行速度、俯仰角度及加速度、飞行高度数据和图像数据。
6、上述基于无人机的火星表面测绘重建系统中,所述无人机导航控制模块包括计算单元、导航单元和控制单元;其中,所述计算单元:根据设定的测绘区域规划无人机飞行路径,将无人机飞行路径传输给所述控制单元;所述导航单元:接收无人机的准确高度、姿态和位置信息,将无人机的准确高度、姿态和位置信息进行处理得到导航数据,将导航数据传输给所述控制单元;所述控制单元:接收无人机飞行路径和导航数据,根据导航数据和无人机飞行路径得到导航控制指令及拍图指令,将导航控制指令传输给所述无人机能源及动力模块,将拍图指令传输给所述测绘相机。
7、上述基于无人机的火星表面测绘重建系统中,所述无人机导航控制模块将无人机的准确高度、姿态和位置信息进行数据滤波、误差矫正的处理得到导航数据。
8、上述基于无人机的火星表面测绘重建系统中,所述导航单元将无人机的准确高度、姿态和位置信息进行数据滤波、误差矫正的处理得到导航数据。
9、上述基于无人机的火星表面测绘重建系统中,所述图像数据处理模块包括图像处理单元和fpga处理单元;其中,所述fpga处理单元:接收图像数据,将图像数据进行预处理得到预处理的数据,将预处理的数据传输给所述图像处理单元;所述图像处理单元:接收预处理的数据,根据预处理的数据通过三维重建计算,生成火星表面的实景三维模型。
10、一种基于无人机的火星表面测绘重建方法,包括:采集飞行数据,对飞行数据进行处理得到处理后的飞行数据,将处理后的飞行数据和火星先验地图信息及无人机火星位置坐标数据进行匹配得到无人机的准确高度、姿态和位置信息;根据设定的测绘区域规划无人机飞行路径,将无人机的准确高度、姿态和位置信息进行处理得到导航数据,根据导航数据和无人机飞行路径得到导航控制指令及拍图指令;根据导航控制指令执行飞行任务;根据拍图指令进行测绘作业得到图像,将无人机的准确高度、姿态和位置信息匹配到图像中得到图像数据;根据图像数据通过三维重建计算,生成火星表面的实景三维模型。
11、一种电子设备,包括:存储器:用于存储计算机可读指令;以及处理器:用于运行所述计算机可读指令,执行基于无人机的火星表面测绘重建方法。
12、本发明与现有技术相比具有如下有益效果:
13、(1)本发明通过火星表面测绘参考单元提供先验地图信息,视觉/惯性里程计模块计算提供飞行高度、姿态和位置等信息,通过两者结合实现无人机在火星表面任何区域任何时间都可获取准确的位姿信息。火星表面测绘任务不受区域及时间限制,相比传统火星测绘方式,提高了测绘灵活性;
14、(2)本发明通过无人机搭载的测绘相机对火星表面进行摄影测绘,无人机飞行高度低,对火星表面成像焦距更短,获得的火星表面图像分辨率更高,理论上可达厘米级。相比于轨道器的测绘相机,此方式可大大提高火星表面测绘精度;
15、(3)本发明通过设计适用于火星表面的图像数据处理单元,该单元集成cpu处理单元、gpu处理单元、fpga处理单元,不同的处理单元实现不同的计算处理,充分发挥不同处理器的优势,提高三维重建效率。
- 还没有人留言评论。精彩留言会获得点赞!