一种基于双缓存导航雷达回波尾迹显示方法与流程
本发明涉及雷达显控领域,特别是一种基于双缓存导航雷达回波尾迹显示方法。
背景技术:
1、导航雷达作为海上航行的眼睛,在雷达显控运行过程中,使用人员通常只在后台运行arpa,默认静默显示ais,只有在需要人工干预的时候才会录取相应的目标和查看详细的ais信息,这是因为屏幕上显示太多符号和文字信息,在复杂的海况环境中,会显得特别凌乱,还可能遮挡关键回波,导致事故发生。
2、在ais静默显示的时段内,使用人员基本都是开启尾迹显示,通过尾迹的方向和尾迹的长度,直观判断出前方目标船的航向和大致航速等多种信息。
3、然而,目前尾迹显示均是基于图像缓存的显示方法,其只能应对稳定的航海环境,很难解决复杂航海环境下的尾迹显示。在复杂航海环境下,通常需要进行一些复杂操作,以便更好观察附近环境,达到避险的目的。
4、上述复杂航海环境,如进港、出港、在近海渔船与渔网偏多、以及接近暗礁等情况。
5、上述复杂操作包括偏心、量程变更和工作模式变更等。
6、上述偏心,指使用人员通过对显示图层进行拖拽等旋转操作,以便更好观察附件环境。
7、上述量程变更,指使用人员通过对显示图层进行缩放等操作,以便更好观察附件环境。
8、工作模式变更,包括显示模式变更和运动模式变更等。
9、现有技术,由于采用图像缓存的显示方法,虽然具有速度快的有优点,但缺点也很明显:图片缓存的大小都是按照当前显示区域设定的,不能更新;因而,当使用人员进行上述拖拽和量程变更等操作时,就需要清空原来的图像缓存,重新根据新数据填充图像缓存,这样原来的尾迹就将得不到保持。另外,由于拖拽和变更量程等操作,均需占用较大内存,系统不能耗费大量内存在图像缓冲区。进一步,在重新绘制图像缓存时,图片的移动和定位也容易出错。
10、显示模式包括正北向上显示模式和非正北向上显示模式;坐标系变更,如变更后坐标系为非正北向上显示模式时,通常需要使用人员通过对显示图层进行角度旋转等操作,便于前方目标船的航向和大致航速等多种信息的判断。
11、在现有技术中,显示图层在进行角度旋转时,是以显示中心为基点进行角度旋转和/或偏移,当目标船在做频繁的大角度的转向时,由于旋转基点为显示中心,角度是要参加计算的,角度变化x、y方向的偏移必然会变化,雷达位置将会围绕显示中心点产生一定的角度偏移,具体如图2所示,因而使得回波和尾迹不能稳定显示。
12、运动模式,包括相对运动模式和绝对运动模式。
13、上述相对运动模式下展现出来的是相对尾迹,就是相对于本船的运动轨迹,只有绝对运动模式下才会显示出绝对尾迹,也即对地尾迹。然而,在实际应用中,相对尾迹的参考价值远远没有绝对尾迹高,因为只有绝对尾迹才能更真实更客观的显示出当前回波的代表物体是运动还是静止的,速度是快还是慢,根据回波长度和宽度判断船的大小,因为尾迹显示的对地的绝对尾迹,所以他们根据尾迹的方向和尾迹的长度,就能很直观的判断出船的航向和大致航速。因而,绝对尾迹能更准确更直观的反应出目标船的运动状态,比如一个浮出水面暗礁,因为它对地稳定没有尾迹,只需要绕过即可,但相对尾迹就显示出以我们船速相反的航向及相同的航速在运动,不容易判断。
14、故而,当船舶处于相对运动模式下时,尾迹将不易判断。
技术实现思路
1、本发明要解决的技术问题是针对上述现有技术的不足,而提供一种基于双缓存导航雷达回波尾迹显示方法,该基于双缓存导航雷达回波尾迹显示方法既具有图像缓存显示尾迹的速度快的优点,又能在偏心或模式切换的情况下在一个周期内恢复到原来尾迹水平,还不增加计算机负担。
2、为解决上述技术问题,本发明采用的技术方案是:
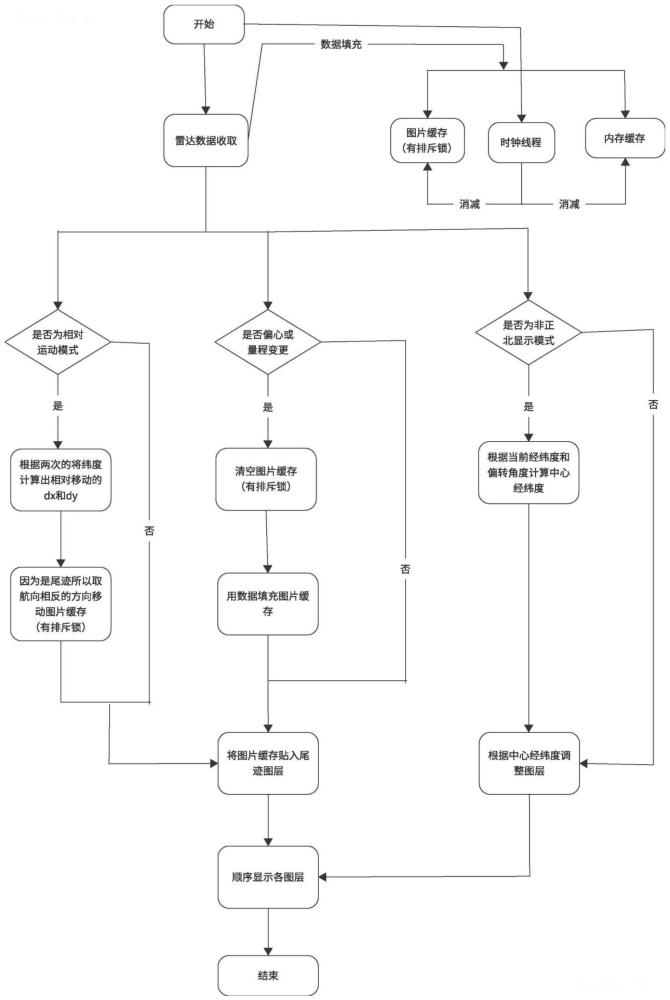
3、一种基于双缓存导航雷达回波尾迹显示方法,包括如下步骤。
4、步骤1、增设内存缓存区:雷达显控具有回波显示缓存区和尾迹显示缓存区;尾迹显示缓存区在已有图片缓存区的基础上增设一个内存缓存区;内存缓存区和图片缓存区具有相同的timer,以实现同步消减的显示效果。
5、步骤2、接收回波:雷达显控接收一条新的径向回波数据a,设径向回波数据a的方位角度为α,径向回波数据a的回波强度为h1。
6、步骤3、径向回波数据a融合缓存:读取内存缓存区中方位角度α处径向回波数据的回波强度h0,并将h0与h1进行比较;当h1>h0时,将径向回波数据a叠加到方位角度α中并缓存;否则,径向回波数据a将不缓存。
7、步骤4、图片缓存:判断用户在当前时刻是否进行了偏心和量程变更操作。
8、a、当用户进行了偏心和量程变更中的任一项操作,则将图片缓存区清空;接着,从步骤3融合后的内存缓存区中读取径向回波数据,并将读取的径向回波数据更新至图片缓存区。
9、b、当用户未进行偏心和量程变更中的任一项操作,则将步骤2接收的径向回波数据a,直接更新至图片缓存区。
10、步骤5、绘制尾迹:根据步骤4中图片缓存区的径向回波数据,在雷达回波图像下方图层绘制雷达回波尾迹图像。
11、还包括步骤6,不同显示模式下的尾迹显示,具体包括如下步骤:
12、步骤6-1、判断显示模式:判断当前显示界面的显示模式;显示模式包括正北向上显示模式和非正北向上显示模式。
13、步骤6-2、旋转:根据显示模式,对步骤5中雷达回波尾迹图像进行旋转操作,便于前方目标船的信息判断;其中,具体旋转操作方法为:
14、a、当显示模式为正北向上显示模式时,步骤5中的雷达回波尾迹图像保持不变。
15、b、当显示模式为非正北向上显示模式时,先以雷达中心为基点,对步骤5中的雷达回波图像、雷达回波尾迹图像以及当前显示界面中的非雷达图像进行同步旋转。
16、步骤6-3、偏移:设旋转前的显示中心坐标为点o,以雷达中心为基点旋转后,原显示中心旋转至点o1,根据原显示中心点o至雷达中心的距离,以及步骤6-2的旋转角度,计算得到点o1的经纬度,便于经纬度坐标系的偏移。
17、还包括步骤7、不同运动模式下的尾迹显示,具体包括如下步骤:
18、步骤7-1、判断运动模式:根据设定判断目标的运动模式,运动模式包括相对运动模式和绝对运动模式;其中,相对运动模式是指目标相对本船的运动模式;绝对运动模式是指目标对地的运动模式。
19、步骤7-2、显示绝对尾迹:当运动模式为绝对运动模式时,步骤5或步骤6显示的尾迹为绝对尾迹;当运动模式为相对运动模式时,步骤5或步骤6显示的尾迹为相对尾迹;此时,需通过将尾迹反向运动的方法,达到相对运动模式下绝对尾迹的显示效果。
20、步骤7-2中,尾迹反向运动方法,具体为:先计算目标相对本船的移动方向和移动距离c;接着,将相对尾迹的图片缓存向本船航向相反的方向移动相同的距离c来达到相对运动状态下绝对尾迹的显示效果。
21、还包括步骤8,重复步骤2至步骤7,进行下一条新径向回波数据的尾迹显示。
22、步骤1中,图片缓存区和内存缓存区均以径向数据的最大长度,和径向数据的最大个数为基准进行创建。
23、步骤1中,timer的时间间隔dtimer,需根据用户选择的尾迹显示时间t计算得到,具体计算公式为:
24、dtimer=t*60*1000/255
25、式中,dtimer的单位为毫秒,t的单位为分。
26、本发明具有如下有益效果:
27、1、本发明既具有图像缓存显示尾迹的速度快的优点,又能在偏心或模式切换的情况下在一个周期内恢复到原来尾迹水平,还不增加计算机负担。也即,能根据船上工作人员的使用习惯和实际显示效果的需要,稳定的显示出尾迹。
28、2、本发明通过在已有图片缓存区的基础上增设一个内存缓存区,并且数据的消减和图片的消减保持一致,因而,在拖拽和切换量程时,能直接利用数据填充尾迹缓存,实现连续的尾迹显示。
29、3、本发明能根据显示模式和运动模式不同,均能实现尾迹的连续真实化展示,不但可以让显示多样化,还能使得操作多样化,从而能够适应更复杂多变的海洋环境。
- 还没有人留言评论。精彩留言会获得点赞!