基于泊车测试台架的泊车测试方法、装置、设备和系统与流程
本技术涉及自动驾驶领域,特别是涉及一种基于泊车测试台架的泊车测试方法、装置、设备和系统。
背景技术:
1、随着计算机技术的发展,出现了自动泊车技术,在开发自动泊车功能的过程中,需要对该自动泊车功能进行测试。
2、现有技术中,对自动泊车功能的测试,通常是通过人工在车库中模拟不同的泊车场景来完成对自动泊车功能的检测,该方式虽然能够检测出自动泊车功能的优劣,但在对不同泊车场景下的自动泊车功能进行测试时均需重新布置泊车场景,人工成本较高,同时,对于障碍物与被测车辆之间的距离仅能在测试结束后进行测量,存在无法实时掌握自动泊车过程中的产生的距离数据的问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够降低人工成本且实时掌握障碍物与被测车辆之间的距离数据的基于泊车测试台架的泊车测试方法、装置、设备和系统。
2、第一方面,本技术提供了一种基于泊车测试台架的泊车测试方法。泊车测试台架包括:固定在地面上用于停放待测车辆的转动平台、位于转动平台上方的横纵向导轨;横纵向导轨上安装有悬挂障碍物的至少一个滑动吊台;障碍物包括动态障碍物和静态障碍物;转动平台上配置有可调节转毂,可调节转毂位于待测车辆的车轮下方;方法包括:
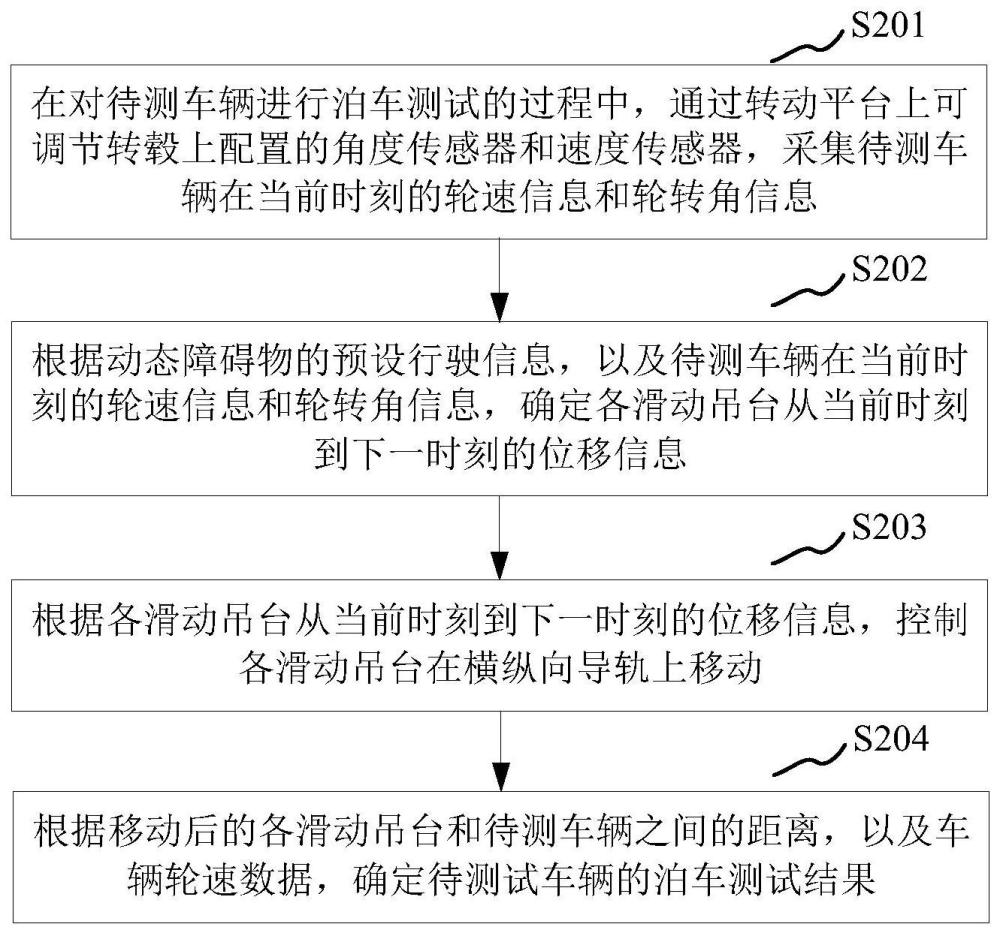
3、在对待测车辆进行泊车测试的过程中,通过转动平台上可调节转毂上配置的角度传感器和速度传感器,采集待测车辆在当前时刻的轮速信息和轮转角信息;
4、根据动态障碍物的预设行驶信息,以及待测车辆在当前时刻的轮速信息和轮转角信息,确定各滑动吊台从当前时刻到下一时刻的位移信息;
5、根据各滑动吊台从当前时刻到下一时刻的位移信息,控制各滑动吊台在横纵向导轨上移动;
6、根据移动后的各滑动吊台和待测车辆之间的距离,确定待测试车辆的泊车测试结果。
7、在其中一个实施例中,根据动态障碍物的预设行驶信息,以及待测车辆在当前时刻的轮速信息和轮转角信息,确定各滑动吊台从当前时刻到下一时刻的位移信息,包括:
8、根据待测试车辆的驱动方式,从车辆的前轮轮速信息和后轮轮速信息中确定目标轮速信息;
9、根据目标轮速信息、待测车辆的前轮转角信息、后轮转角信息和车长信息,确定各滑动吊台的基础移动距离;
10、根据每一动态障碍物的预设行驶信息,确定悬挂该动态障碍物的滑动吊台的叠加移动距离;
11、将基础移动距离作为悬挂各静态障碍物的滑动吊台从当前时刻到下一时刻的位移信息,以及将悬挂每一动态障碍物的滑动吊台的叠加移动距离与基础移动距离之和,作为悬挂该动态障碍物的滑动吊台从当前时刻到下一时刻的位移信息。
12、在其中一个实施例中,根据目标轮速信息、待测车辆的前轮转角信息、后轮转角信息和车长信息,确定各滑动吊台的基础移动距离,包括:
13、根据目标轮速信息、待测车辆的前轮转角信息、后轮转角信息和车长信息,确定待测车辆在转动平台上的转动角度和泊车速度;
14、根据待测车辆的前轮转角信息和后轮转角信息,确定滑移角;
15、根据待测车辆在转动平台上的转动角度、泊车速度和滑移角,确定各滑动吊台的基础移动距离。
16、在其中一个实施例中,根据移动后的滑动吊台和待测车辆之间的距离,确定待测试车辆的泊车测试结果,包括:
17、根据移动后的各滑动吊台和待测车辆之间的距离,判断待测车辆与障碍物是否存在碰撞风险;
18、若存在碰撞风险,则确定待测试车辆的泊车测试结果为不通过。
19、在其中一个实施例中,判断待测车辆与障碍物是否存在碰撞风险之后,还包括:
20、若不存在碰撞风险,则返回继续执行通过转动平台上可调节转毂上配置的角度传感器和速度传感器,采集待测车辆在下一时刻的轮速信息和轮转角信息的操作。
21、在其中一个实施例中,根据动态障碍物的预设行驶信息,以及待测车辆在当前时刻的轮速信息和轮转角信息,确定各滑动吊台从当前时刻到下一时刻的位移信息,包括:
22、判断待测车辆在当前时刻的轮速信息是否为零;
23、若不为零,则根据动态障碍物的预设行驶信息,以及待测车辆在当前时刻的轮速信息和轮转角信息,确定各滑动吊台从当前时刻到下一时刻的位移信息。
24、在其中一个实施例中,判断待测车辆在当前时刻的轮速信息是否为零之后,还包括:
25、若为零,则判断待测车辆的轮速信息为零的持续时长是否达到预设时长;
26、若是,则根据当前时刻各滑动吊台和待测车辆之间的距离,确定待测试车辆的泊车测试结果。
27、在其中一个实施例中,在对待测车辆进行泊车测试之前,方法还包括:
28、根据待测试泊车场景,配置各滑动吊台悬挂的障碍物,并调整转动平台的角度和各滑动吊台在横纵向导轨上的位置。
29、第二方面,本技术还提供了一种基于泊车测试台架的泊车测试装置。所述装置包括:
30、信息采集模块,用于在对待测车辆进行泊车测试的过程中,通过转动平台上可调节转毂上配置的角度传感器和速度传感器,采集待测车辆在当前时刻的轮速信息和轮转角信息;
31、位移确定模块,用于根据动态障碍物的预设行驶信息,以及待测车辆在当前时刻的轮速信息和轮转角信息,确定各滑动吊台从当前时刻到下一时刻的位移信息;
32、导轨控制模块,用于根据各滑动吊台从当前时刻到下一时刻的位移信息,控制滑动吊台在横纵向导轨上移动;
33、结果确定模块,用于根据移动后的各滑动吊台和待测车辆之间的距离,确定待测试车辆的泊车测试结果。
34、第三方面,本技术还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
35、在对待测车辆进行泊车测试的过程中,通过转动平台上可调节转毂上配置的角度传感器和速度传感器,采集待测车辆在当前时刻的轮速信息和轮转角信息;
36、根据动态障碍物的预设行驶信息,以及待测车辆在当前时刻的轮速信息和轮转角信息,确定各滑动吊台从当前时刻到下一时刻的位移信息;
37、根据各滑动吊台从当前时刻到下一时刻的位移信息,控制各滑动吊台在横纵向导轨上移动;
38、根据移动后的各滑动吊台和待测车辆之间的距离,确定待测试车辆的泊车测试结果。
39、第四方面,本技术还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
40、在对待测车辆进行泊车测试的过程中,通过转动平台上可调节转毂上配置的角度传感器和速度传感器,采集待测车辆在当前时刻的轮速信息和轮转角信息;
41、根据动态障碍物的预设行驶信息,以及待测车辆在当前时刻的轮速信息和轮转角信息,确定各滑动吊台从当前时刻到下一时刻的位移信息;
42、根据各滑动吊台从当前时刻到下一时刻的位移信息,控制各滑动吊台在横纵向导轨上移动;
43、根据移动后的各滑动吊台和待测车辆之间的距离,确定待测试车辆的泊车测试结果。
44、第五方面,本技术还提供了一种泊车测试系统。所述泊车测试系统包括泊车测试台架和计算机设备;
45、其中,泊车测试台架包括:固定在地面上用于停放待测车辆的转动平台、位于转动平台上方的横纵向导轨;横纵向导轨上安装有悬挂障碍物的至少一个滑动吊台;障碍物包括动态障碍物和静态障碍物;转动平台上配置有可调节转毂,可调节转毂位于待测车辆的车轮下方;可调节转毂上配置有角度传感器和速度传感器;
46、计算机设备分别与转动平台、角度传感器、速度传感器以及滑动吊台通信连接,用于执行本技术任意实施例提供的基于泊车测试台架的泊车测试方法。
47、第六方面,本技术还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
48、在对待测车辆进行泊车测试的过程中,通过转动平台上可调节转毂上配置的角度传感器和速度传感器,采集待测车辆在当前时刻的轮速信息和轮转角信息;
49、根据动态障碍物的预设行驶信息,以及待测车辆在当前时刻的轮速信息和轮转角信息,确定各滑动吊台从当前时刻到下一时刻的位移信息;
50、根据各滑动吊台从当前时刻到下一时刻的位移信息,控制各滑动吊台在横纵向导轨上移动;
51、根据移动后的各滑动吊台和待测车辆之间的距离,确定待测试车辆的泊车测试结果。
52、上述基于泊车测试台架的泊车测试方法、装置、设备和系统,基于包含转动平台和安装有滑动吊台的横纵向导轨的泊车测试台架来进行泊车测试,在对待测车辆进行泊车测试的过程中,放置在转动平台上的待测车辆的每个车轮下对应转动平台上的一个可调节转毂,通过各可调节转毂上配置的角度传感器和速度传感器,采集待测车辆在当前时刻的轮速信息和轮转角信息,并结合动态障碍物的预设行驶信息,确定各滑动吊台从当前时刻到下一时刻的位移信息,并基于该位移信息,控制各滑动吊台在横纵向导轨上移动;进而根据移动后的各滑动吊台和待测车辆之间的距离,确定待测试车辆的泊车测试结果。本方法由于被测车辆被放置在可转动平台上,且转动平台上的四个可调节转毂分别位于待测车辆的四个车轮的下方,所以即使被测车辆处于行驶状态,其在转动平台上的位置也是相对固定的。在进行泊车测试时,通过实时获取到被测车辆的轮速信息和轮转角信息,以及滑动吊台实时位置,预测滑动吊台未来的移动信息,进而基于该位移信息控制横纵向导轨上的滑动吊台,从而实现掌握泊车过程中车辆与障碍物之间的距离。另外,本方案可通过调整滑动吊台及其悬挂的障碍物来模拟各种测试场景,无需再通过人工切换不同的泊车场景,进一步降低了自动泊车测试的人工成本。
- 还没有人留言评论。精彩留言会获得点赞!