一种降落伞用相对地高测量系统及方法与流程
本发明属于应急救生降落伞开伞探测,具体涉及一种降落伞用相对地高测量系统及方法。
背景技术:
1、降落伞控制设备在使用时,需要实时监测高度以响应开伞作动信号。目前现有的机械或电子式开伞设备一般是通过膜盒、气压传感器等检测大气静压,进而解算气压高度。
2、传统的气压测量方案只能解算相对于海平面的绝对高度,因此需要预设着陆地面的高度,无法适应着陆点未知和应急救生的使用场景,且气压高度解算会受天气、温度和气流冲击等因素影响,测量误差较难规避。
3、激光雷达和无线电测高仪等直接测量相对地高的装置,对于单人伞降系统,存在功耗和体积无法接受,超高空伞降高度测量盲区以及跳伞姿态难以控制等问题。
4、现阶段国内外还没有一种能够在单人伞降设备上实现小体积、低功耗的相对地高测量伞降控制装置。更多的是要预先设定着陆高度,然后通过气压传感器或者单纯的卫星定位等手段获取绝对高度信息,但本质上都不具备相对地高的测量能力。一旦落点发生偏离,或者落点高度设置错误,将会导致严重的伞降事故,更无法适应应急救生环境下,着陆点随机,着陆环境复杂的应用场景。
技术实现思路
1、本发明的目的是:提供了一种降落伞用相对地高测量系统及方法。本发明具有功耗低、体积小、精度高且不受伞降姿态影响的的特点。
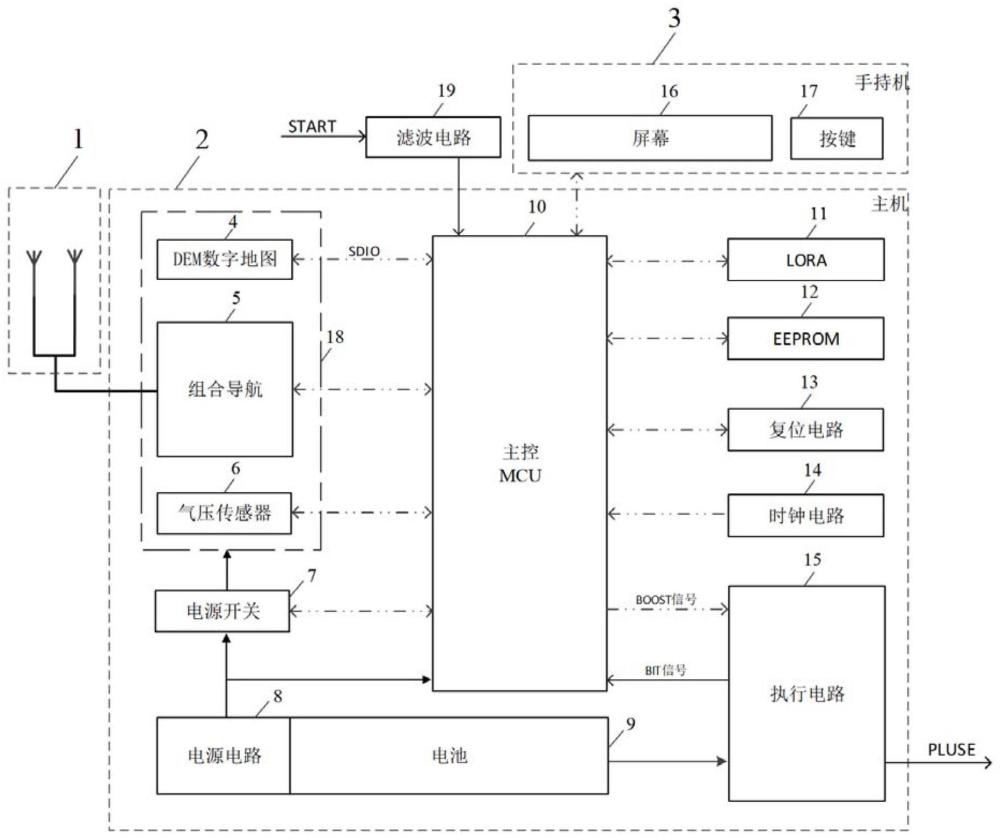
2、本发明的技术方案是:一种降落伞用相对地高测量系统,包括舱内无线通讯模块,用于初始状态信息装载;惯性导航模块,用于提供出舱初始阶段的位置信息;卫星导航模块,用于提供降落中、后段的位置信息;dem数字地图模块,用于提供跳伞位置的高程信息;主控mcu模块,用于基于初始状态信息、出舱初始阶段的位置信息、高程信息解算出舱初始阶段的相对地高;还用于基于降落中、后段的位置信息及高程信息对应解算降落中、后段的相对地高。
3、前述的落伞用相对地高测量系统中,还包括气压传感器模块,用于基于气压变化解算实时海拔高度;所述的海拔高度用于辅助修正各阶段的相对地高。
4、前述的落伞用相对地高测量系统中,所述的初始状态信息包括卫星星历信息、飞机实时的位置、速度和姿态信息,飞机对地高度。
5、前述的落伞用相对地高测量系统中,还包括滤波模块,用于对出舱检测信息进行滤波;出舱检测信息被输入到主控mcu模块以启动相对地高测量系统;所述的出舱检测信息包括出舱时的气压变化信息、出舱时的无线通讯信息、出舱时的加速度变化。
6、前述的落伞用相对地高测量系统中,当出舱时的气压变化信息、出舱时的无线通讯信息和出舱时的加速度变化中的两个信息满足伞降条件时,主控mcu模块启动相对地高测量系统。
7、前述的落伞用相对地高测量系统中,出舱初始阶段为跳伞动作的前5s,降落中段为跳伞动作的第5~35s,降落后段为跳伞动作的第35s后。
8、前述的落伞用相对地高测量系统中,通过预设的高度边界值hcr和速度边界值vcr将跳伞任务分为四个工作区:当导航高度h≥hcr且导航合成速度vr≥vcr时为高空高速区;当导航高度h≥hcr且导航合成速度vr≤vcr时为高空低速区;当导航高度h≤hcr且导航合成速度vr≥vcr时为低空高速区;当导航高度h≤hcr且导航合成速度vr≤vcr时为低空低速区。
9、一种如前所述的落伞用相对地高测量系统的测量方法,包括下述步骤:
10、步骤1:舱内无线通讯模块将初始状态信息装载入主控mcu模块;
11、步骤2:出舱初始阶段,主控mcu模块调用dem数字地图模块中的高程信息,并基于初始状态信息和惯性导航模块输出的位置信息及实时解算相对地高;
12、步骤3:降落中、后段,主控mcu模块通过分工作区区地图插值方法查询调用dem数字地图模块中的高程信息,并基于卫星导航模块输出的位置信息实时解算相对地高。
13、前述的落伞用相对地高测量系统的测量方法中,步骤2中,解算前,将出舱检测信息输入到主控mcu模块,当出舱时的气压变化信息、出舱时的无线通讯信息和出舱时的加速度变化中的两个信息满足伞降条件时,主控mcu模块开始解算。
14、前述的落伞用相对地高测量系统的测量方法中,降落中段解算相对地高的方法如下:
15、步骤1:惯性导航模块输出t0时刻的导航坐标系三维位置及速度信息记为[xi(t0)yi(t0)hi(t0)vix(t0)viy(y0)vih(t0)];
16、步骤2:卫星导航模块在t0+δt时刻输出t0时刻的rdss模糊三维位置信息记为[xd(t0) yd(t0) hd(t0),δt为rdss的时延;
17、步骤3:气压传感器输出t0+δt时刻的气压海拔高度hp(t0+δt)到主控mcu;
18、步骤4:惯性导航模块输出t0时刻的导航坐标系三维位置及速度信息记为[xi(t0)yi(t0) hi(t0) vix(t0) viy(t0) vih(t0)];
19、步骤5:惯性导航模块输出t0+δt时刻的导航坐标系三向速度,记为[vix(t0+δt)viy(t0+δt) vih(t0+δt)];
20、步骤6:主控mcu根据下式计算预测三维位置:
21、
22、
23、
24、步骤7:主控mcu根据下式计算t0+δt时刻的导航合成速度预测值:
25、
26、步骤8:主控mcu根据导航高度预测值hds和导航合成速度预测值vr作为判据区分工作区,通过所得水平坐标预算值(xds,yds)查询调用地形高度查询(xds,yds)临近的四个网格采样点地形坐标值,记为a点(x0,y1,h1)、b点(x0,y1,h2)、c点(x1,y0,h3)、d点(x1,y1,h4)、
27、步骤9:当hds≥hcr且vr≥vcr时,双线性插值估算:
28、
29、
30、
31、步骤10:当hds≥hcr且vr≤vcr,以及hds≤hcr且vr≤vcr时,计算点到四个点之间的距离:
32、
33、引入一个加权函数,其中p为幂参数,应取0.5到3之间的正实数,p值越大,较远距离的数据点权重会迅速减小,应根据数据拟合情况调整;
34、
35、
36、步骤11:当hds≤hcr且vr≥vcr时取hds=max{h1,h2,h3,h4}
37、步骤12:主控mcu解算惯导相对地高hrd=hds-hds和气压相对地高hrp=hp(t0+δt)-hds;
38、步骤13:自动模式下选用惯导相对地高hrd作为导航相对地高hr。
39、本发明的优点是:
40、1)本开伞设备,能够在开伞高度不定,着陆高度未知的情况下,实现全地形、全天侯、全自动开伞;
41、2)本开伞设备,采用间接测高方法,相对高度测量不受天气,气流,伞系统姿态等外界环境因素影响;
42、3)本开伞设备,高程采样间隔精度高,相对地高准确度好;
43、4)本开伞设备,与现有的气压式开伞设备相比,具有跳伞全流程全自动完成、安全性高、无需伞降人员进行高度参数设置。
44、5)本开伞设备中的相对地高测量原理可应用于其他高考应急救生和小体积测高设备。
45、6)本开伞设备阶段间的快速切换不会出现数据突变,使用可靠。
- 还没有人留言评论。精彩留言会获得点赞!