巡逻机器人多地图任务执行方法、系统和可读存储介质与流程
本发明涉及机器人,更具体的,涉及一种巡逻机器人多地图任务执行方法、系统和可读存储介质。
背景技术:
1、目前,针对很多地区开始利用机器人进行巡逻,以减少人力成本,同时增强巡逻效率。
2、但是目前,现有机器人巡逻时,存在以下缺点:1、对地形复杂的场景进行单一地图创建,对建图算法、导航算法和运控能力要求较高,且需要高精度传感器,总体成本较高;2、部分场景无法单一建图,导致可适用范围变窄。
技术实现思路
1、本发明的目的是提供一种巡逻机器人多地图任务执行方法、系统和可读存储介质,可以对复杂地形进行分割简化创建地图,无需特别利用建图和导航算法,降低了实现门槛,也节约了成本;同时采用连接点初始化切换地图,操作简单,易于推广,提升了机器人巡逻的应用效率和增强了机器人巡逻应用场景的应用效果。
2、本发明第一方面提供了一种巡逻机器人多地图任务执行方法,包括以下步骤:
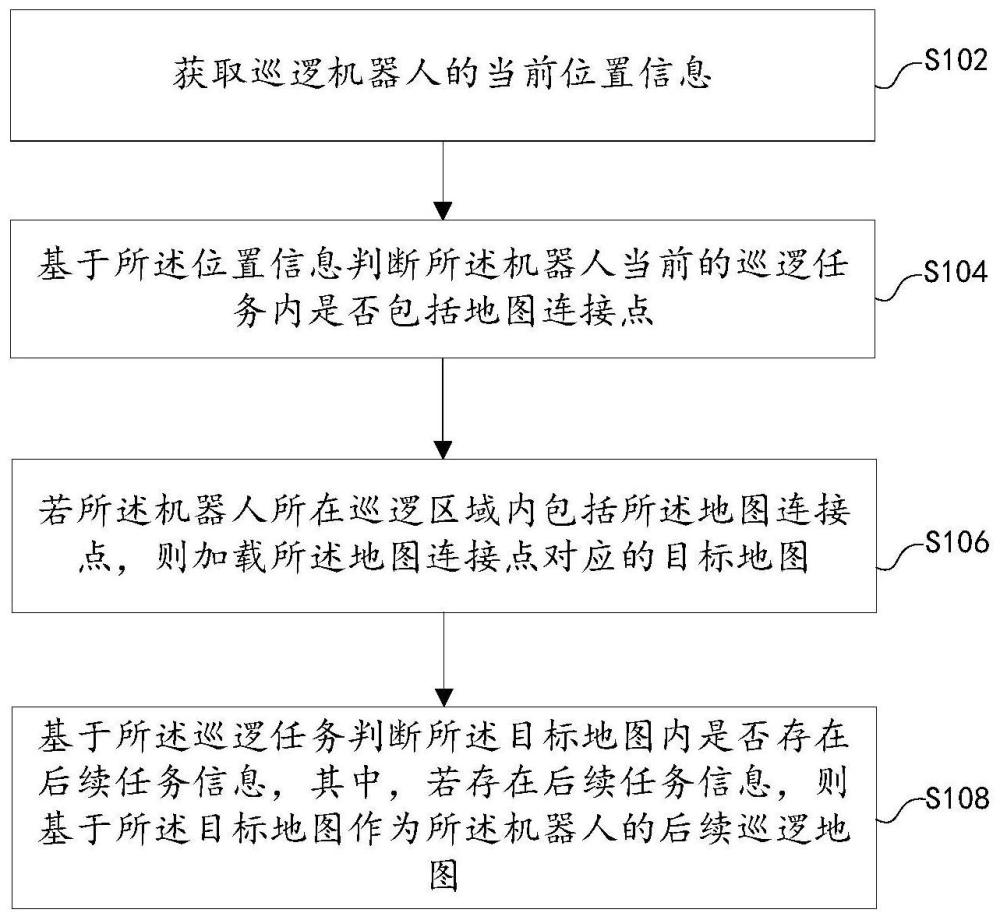
3、获取巡逻机器人的当前位置信息;
4、基于所述位置信息判断所述机器人当前的巡逻任务内是否包括地图连接点,其中,
5、若所述机器人所在巡逻区域内包括所述地图连接点,则加载所述地图连接点对应的目标地图;
6、基于所述巡逻任务判断所述目标地图内是否存在后续任务信息,其中,若存在后续任务信息,则基于所述目标地图作为所述机器人的后续巡逻地图。
7、本方案中,所述获取巡逻机器人的当前位置信息,具体包括:
8、获取机器人的巡逻任务;
9、基于所述巡逻任务识别机器人的当前巡逻区域;
10、基于所述当前巡逻区域结合感应数据和/或定位数据获取所述位置信息。
11、本方案中,所述基于所述当前巡逻区域结合感应数据获取所述位置信息,具体包括:
12、基于设置在所述当前巡逻区域内的感应设备建立与所述机器人的通信连接以获取所述感应数据;
13、基于所述感应数据结合所述当前巡逻区域进行坐标系标定得到所述位置信息。
14、本方案中,所述基于所述当前巡逻区域结合定位数据获取所述位置信息,具体包括:
15、基于所述机器人的gps信号和/或北斗信号获取所述定位数据;
16、基于所述定位数据结合所述当前巡逻区域进行坐标系标定得到所述位置信息。
17、本方案中,所述基于所述位置信息判断所述机器人当前的巡逻任务内是否包括地图连接点,具体包括:
18、获取地图标记点,其中,所述地图标记点包括多个重合区域的地图连接点;
19、基于所述位置信息判断所述当前巡逻区域内是否包括所述地图标记点,其中,若包括则响应所述地图标记点以生成目标标记点,并基于所述目标标记点进行目标地图加载,同时在后台对所述目标标记点进行可视化显示。
20、本方案中,所述基于所述巡逻任务判断所述目标地图内是否存在后续任务信息,具体包括:
21、基于所述巡逻任务中的地图属性遍历所有的所述目标标记点以判断是否存在后续任务信息,其中,
22、若地图属性中成功匹配所述目标标记点,则判断得到所述目标标记点对应的目标地图内存在所述后续任务信息。
23、本发明第二方面还提供一种巡逻机器人多地图任务执行系统,包括存储器和处理器,所述存储器中包括巡逻机器人多地图任务执行方法程序,所述巡逻机器人多地图任务执行方法程序被所述处理器执行时实现如下步骤:
24、获取巡逻机器人的当前位置信息;
25、基于所述位置信息判断所述机器人当前的巡逻任务内是否包括地图连接点,其中,
26、若所述机器人所在巡逻区域内包括所述地图连接点,则加载所述地图连接点对应的目标地图;
27、基于所述巡逻任务判断所述目标地图内是否存在后续任务信息,其中,若存在后续任务信息,则基于所述目标地图作为所述机器人的后续巡逻地图。
28、本方案中,所述获取巡逻机器人的当前位置信息,具体包括:
29、获取机器人的巡逻任务;
30、基于所述巡逻任务识别机器人的当前巡逻区域;
31、基于所述当前巡逻区域结合感应数据和/或定位数据获取所述位置信息。
32、本方案中,所述基于所述当前巡逻区域结合感应数据获取所述位置信息,具体包括:
33、基于设置在所述当前巡逻区域内的感应设备建立与所述机器人的通信连接以获取所述感应数据;
34、基于所述感应数据结合所述当前巡逻区域进行坐标系标定得到所述位置信息。
35、本方案中,所述基于所述当前巡逻区域结合定位数据获取所述位置信息,具体包括:
36、基于所述机器人的gps信号和/或北斗信号获取所述定位数据;
37、基于所述定位数据结合所述当前巡逻区域进行坐标系标定得到所述位置信息。
38、本方案中,所述基于所述位置信息判断所述机器人当前的巡逻任务内是否包括地图连接点,具体包括:
39、获取地图标记点,其中,所述地图标记点包括多个重合区域的地图连接点;
40、基于所述位置信息判断所述当前巡逻区域内是否包括所述地图标记点,其中,若包括则响应所述地图标记点以生成目标标记点,并基于所述目标标记点进行目标地图加载,同时在后台对所述目标标记点进行可视化显示。
41、本方案中,所述基于所述巡逻任务判断所述目标地图内是否存在后续任务信息,具体包括:
42、基于所述巡逻任务中的地图属性遍历所有的所述目标标记点以判断是否存在后续任务信息,其中,
43、若地图属性中成功匹配所述目标标记点,则判断得到所述目标标记点对应的目标地图内存在所述后续任务信息。
44、本发明第三方面提供了一种计算机可读存储介质,所述计算机可读存储介质中包括机器的一种巡逻机器人多地图任务执行方法程序,所述巡逻机器人多地图任务执行方法程序被处理器执行时,实现如上述任一项所述的一种巡逻机器人多地图任务执行方法的步骤。
45、本发明公开的一种巡逻机器人多地图任务执行方法、系统和可读存储介质,可以对复杂地形进行分割简化创建地图,无需特别利用建图和导航算法,降低了实现门槛,也节约了成本;同时采用连接点初始化切换地图,操作简单,易于推广,提升了机器人巡逻的应用效率和增强了机器人巡逻应用场景的应用效果。
技术特征:
1.一种巡逻机器人多地图任务执行方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种巡逻机器人多地图任务执行方法,其特征在于,所述获取巡逻机器人的当前位置信息,具体包括:
3.根据权利要求2所述的一种巡逻机器人多地图任务执行方法,其特征在于,所述基于所述当前巡逻区域结合感应数据获取所述位置信息,具体包括:
4.根据权利要求2所述的一种巡逻机器人多地图任务执行方法,其特征在于,所述基于所述当前巡逻区域结合定位数据获取所述位置信息,具体包括:
5.根据权利要求3或者4所述的一种巡逻机器人多地图任务执行方法,其特征在于,所述基于所述位置信息判断所述机器人当前的巡逻任务内是否包括地图连接点,具体包括:
6.根据权利要求5所述的一种巡逻机器人多地图任务执行方法,其特征在于,所述基于所述巡逻任务判断所述目标地图内是否存在后续任务信息,具体包括:
7.一种巡逻机器人多地图任务执行系统,其特征在于,包括存储器和处理器,所述存储器中包括巡逻机器人多地图任务执行方法程序,所述巡逻机器人多地图任务执行方法程序被所述处理器执行时实现如下步骤:
8.根据权利要求7所述的一种巡逻机器人多地图任务执行系统,其特征在于,所述获取巡逻机器人的当前位置信息,具体包括:
9.根据权利要求8所述的一种巡逻机器人多地图任务执行系统,其特征在于,所述基于所述当前巡逻区域结合感应数据获取所述位置信息,具体包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中包括一种巡逻机器人多地图任务执行方法程序,所述巡逻机器人多地图任务执行方法程序被处理器执行时,实现如权利要求1至6中任一项所述的一种巡逻机器人多地图任务执行方法的步骤。
技术总结
本发明公开的一种巡逻机器人多地图任务执行方法、系统和可读存储介质,其中方法包括:获取巡逻机器人的当前位置信息;基于所述位置信息判断所述机器人当前的巡逻任务内是否包括地图连接点,若所述机器人所在巡逻区域内包括所述地图连接点,则加载所述地图连接点对应的目标地图;基于所述巡逻任务判断所述目标地图内是否存在后续任务信息,若存在后续任务信息,则基于所述目标地图作为所述机器人的后续巡逻地图。本发明可以对复杂地形进行分割简化创建地图,无需特别利用建图和导航算法,降低了实现门槛,也节约了成本;同时采用连接点初始化切换地图,操作简单,易于推广,提升了机器人巡逻的应用效率和增强了机器人巡逻应用场景的应用效果。
技术研发人员:刘恒,庄嘉仪,柏林,刘彪,舒海燕,袁添厦,祝涛剑,沈创芸,王恒华,方映峰
受保护的技术使用者:广州高新兴机器人有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!