一种八自由度线结构光变螺距螺杆测量装置
本发明涉及一种基于线结构光传感器的八自由度变螺距螺杆测量装置,属于精密测试技术、复杂曲面测量领域。
背景技术:
1、螺杆是应用在注塑成型机械传动、深海扬矿管联接等国家重点装备中关键的复杂曲面零部件。由于螺杆加工环节的几何误差会产生倾覆力矩,致使高速运载的螺杆螺旋副受力不均,影响整个机械系统传动的稳定性、准确性和使用寿命。因此亟待发展一种快速获取变螺距螺杆几何误差的高精尖测量装置。
2、目前测量装置主要包括三种:(1)传统接触式测量装置。专利cn202222626032.5通过移动仅有二自由度的接触式传感器获取被测目标单一截面的轮廓数据,测量原理简单,但存在轮廓数据不够完整,传感器易磨损的缺点。(2)点结构光非接触式测量装置。专利cn200910057360.4以非接触式传统点结构光代替传统接触式传感器,具备三自由度,其传感器在横向移动自由度驱动的同时,被测目标具备旋转自由度,测量速度进一步提高。但装置没有考虑到传感器光学测量角度,不具备最优角度调整的自由度,点结构光存在散射、重反射导致测量不精准的情况。(3)线结构光非接触式测量装置。专利cn201910926364.5对被测目标装夹约束其自由度,以线结构光代替点结构的形式,但传感器也仅有二自由度,只能获得被测物体单一截面的轮廓参数,存在测量数据不完整的问题。综上可知,现有变螺距螺杆测量装置仍存在测量效率低下、测量不精准和传感器角度调整自由度不足的问题,并且值得注意的是以上皆没有考虑重量大而螺杆精密测量安装不便的问题。
3、为克服以上问题,本发明公开一种八自由度线结构光变螺距螺杆测量装置,综合考虑了测量效率、完整性、准确性以及大尺寸装夹的问题,创新性的采用回转式的模块可以自适应的装夹不同尺寸和不同螺距类型的变螺距螺杆,有八自由度调整模块使得两个线结构光传感器能够以最优的角度获取整个螺旋曲面的轮廓信息,大大增加了装置的实用性。
技术实现思路
1、本发明提供了一种八自由度线结构光变螺距螺杆测量装置,设计双线结构光测头同步获取左右曲面轮廓,用以提高测量效率和数据完整性,并设计自动装夹模块,避免测量目标重量大导致的操作安全隐患。
2、本发明装置针对现有变螺距螺杆测量装置的问题,进行原理性创新,基本思想是:①为了避免角度问题产生重反射所导致的结构光测量不精准,设计多自由度结构调节测量姿态,用以实现两组线结构光传感器测量角度最优。②针对大尺寸、大重量变螺距螺杆的安装,设计双链轮模块结合90度导向,再配合夹手单元自动将被测目标提升、转向和装夹,以此提高装夹过程的安全性和稳定性。
3、为实现上述目的和原理,本发明的技术方案如下:
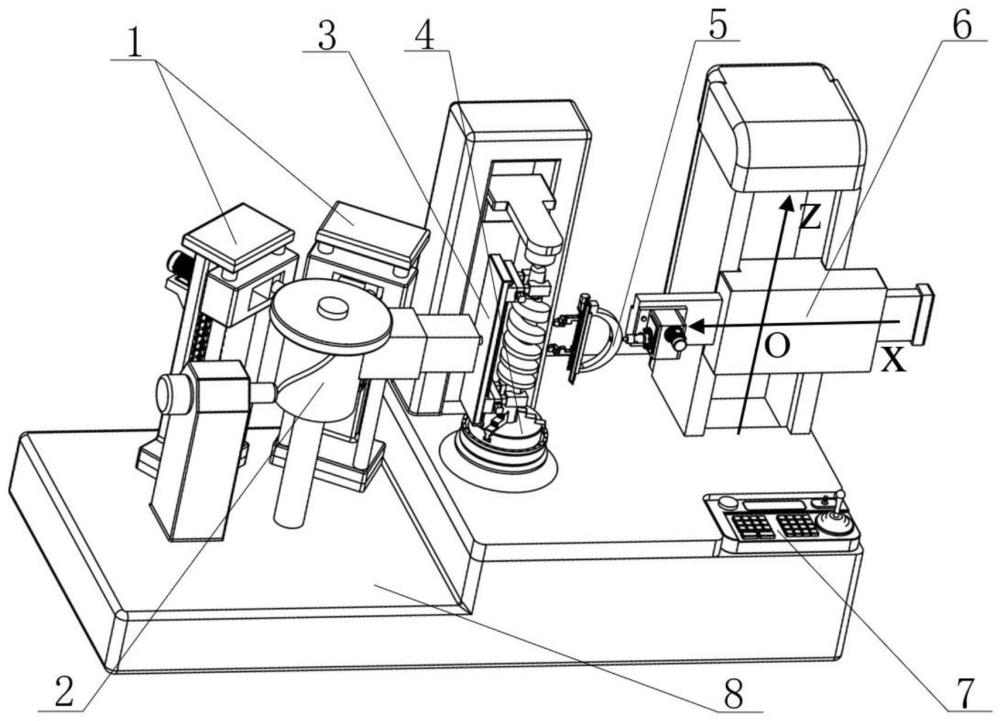
4、一种八自由度线结构光变螺距螺杆测量装置由链轮模块1、装夹换向模块2、螺杆夹紧模块3、转台模块4、角度调整模块5、位移调整模块6、操作面板7、机架8这八个部分组成;
5、所述机架8左侧安装装夹换向模块2、两套链轮模块1,链轮模块1带动装夹换向模块2进行工作,装夹换向模块2作为被测工件的安装平台,主要完成对变螺距螺杆的换向、安装等工序,装夹换向模块2右侧末端安装螺杆夹紧模块3,螺杆夹紧模块3可实现对变螺距螺杆的自动夹持与释放,转台模块4、位移调整模块6安装在机架8右侧,转台模块4主要工作是完成对变螺距螺杆的夹紧、定位,同时在测量时带动变螺距螺杆匀速旋转,位移调整模块6的主要工作是带动安装在x轴末端的角度调整模块5进行x轴方向的水平移动以及z轴方向的竖直移动,可使线结构光传感器选择一个最佳的位置进行测量,角度调整模块5具有多自由度可使线结构光传感器实现测量最优角度调节,从而获取变螺距螺杆更多轮廓表面的有效轮廓数据,所述操作面板7安装在机架8右侧边缘,可实现对整个装置的控制;
6、所述链轮模块1包括链轮电动机1.1、链轮机构1.2、换向传动杆1.3、链轮滑块1.4、双柱式导轨1.5;
7、所述双柱式导轨1.5固定在机架8上,链轮电动机1.1安装在双柱式导轨1.5后侧,链轮机构1.2安装在双柱式导轨1.5前侧,换向传动杆1.3后端与链轮机构1.2中一个链节进行固定且装配在链轮滑块1.4内部,链轮滑块1.4安装在双柱式导轨1.5上,链轮机构1.2由链轮电动机1.1驱动,带动链轮滑块1.4在双柱式导轨1.5上移动,从而带动被测工件完成上下抬升工序;
8、所述装夹换向模块2包括转向柱2.1、导向滑块2.2、转向导轨2.3、凸轮槽2.4;
9、所述导向滑块2.2、转向导轨2.3固定在机架8左侧,转向柱2.1安装在转向导轨2.3上,换向传动杆1.3前端与转向柱2.1相连接,以实现转向柱2.1跟随换向传动杆1.3一起运动完成上下抬升工序,凸轮槽2.4在转向柱2.1圆柱表面上,导向滑块2.2前端有一圆形凸起与凸轮槽2.4相连接,以实现转向柱2.1在上下运动的同时进行90°的旋转完成装夹和换向工序;
10、所述螺杆夹紧模块3包括夹紧转向电机3.1、蜗轮蜗杆机构一3.2、夹紧模块转轴3.3、转向底座3.4、夹手单元导轨3.5、夹手电机3.6、夹手3.7、夹紧滑块3.8、夹手单元3.9;
11、所述蜗轮蜗杆机构一3.2安装在转向柱2.1末端,夹紧转向电机3.1安装在蜗轮蜗杆机构一3.2上并提供驱动力,夹紧模块转轴3.3左端与蜗轮蜗杆机构一3.2中的蜗轮同轴固定,夹紧模块转轴3.3右端与转向底座3.4底部通过螺栓固定,由于蜗轮蜗杆具有自锁特性,可以充分保证装夹换向工序过程的安全性和稳定性,夹手单元导轨3.5安装在转向底座3.4上,两个夹手单元3.9分别装配在夹手单元导轨3.5上下两端,两个夹手单元3.9之间距离可以更改,以适应不同长度被测工件的测量需求,完成变螺距螺杆夹持工序;
12、所述夹手单元3.9包括夹手电机3.6、夹手3.7、夹紧滑块3.8,其中夹紧滑块3.8装配在夹手单元导轨3.5上,夹紧滑块3.8外侧安装夹手电机3.6,夹紧滑块3.8设置两个夹手3.7,通过夹手电机3.6转动改变两个夹手3.7之间距离,以适应不同直径被测工件的测量需求;
13、所述位移调整模块6包括横梁6.1、x轴模组6.2、z轴模组6.3;
14、所述z轴模组6.3固定在机架8上,x轴模组6.2安装在z轴模组6.3上,可以在z轴方向移动,横梁6.1安装在x轴模组6.2上,可以在x轴方向移动,因此可使得线结构光传感器增加两个移动自由度f1、f2;
15、所述角度调整模块5包括d形架5.1、测头电机5.2、双向丝杠5.3、测头单元5.4、测头滑块5.5、测头5.6、倾角调节舵机5.7、测头支架5.8、线性光栅5.9、d形架转向电机5.10、蜗轮蜗杆机构二5.11、d形架转轴5.12;
16、所述蜗轮蜗杆机构二5.11通过螺栓安装在横梁6.1上,d形架转向电机5.10安装在蜗轮蜗杆机构二5.11上,d形架转轴5.12右端通过螺栓与蜗轮蜗杆机构二5.11连接,d形架转轴5.12左端通过螺栓与d形架5.1连接,d形架转向电机5.10驱动蜗轮蜗杆机构二5.11,可以带动d形架5.1转动,从而使线结构光传感器相对于被测工件具有另外一个转动自由度f3;
17、所述测头电机5.2、双向丝杠5.3都安装在d形架5.1上,其中双向丝杠5.3有两段旋向不同的螺纹,即一段左旋螺纹、另一段右旋螺纹,测头单元5.4分别安装在双向丝杠5.3的两段左、右旋螺纹上,线性光栅5.9安装在d形架5.1侧面,实时精确反馈两个测头单元5.4位移数据,以实现测量位置姿态调整的全闭环,提高测量的准确性,d形架5.1中间挖空,以减少重量、保证稳定性,测头电机5.2驱动双向丝杠5.3旋转,带动两个测头单元5.4同步的相对运动,从而使线结构光传感器相对于被测工件具有两个移动自由度f4、f5;
18、所述测头单元5.4由测头滑块5.5、测头5.6、倾角调节舵机5.7、测头支架5.8组成,其中测头滑块5.5安装在双向丝杠5.3上,测头支架5.8底部通过螺栓与测头滑块5.5连接,测头支架5.8顶部通过螺栓与倾角调节舵机5.7连接,测头5.6通过螺栓安装在倾角调节舵机5.7上,可以实现结构光传感器针对变螺距螺杆螺旋线法线方向进行测量角度姿态的调整,避免光重反射现象,获取整个螺旋曲面的轮廓信息,提高测量的效率以及完整性,两个测头5.6都安装在倾角调节舵机5.7之上,可以使线结构光传感器相对于被测工件具有两个转动自由度f6、f7;
19、所述转台模块4包括卡盘电机4.1、圆形光栅4.2、三爪卡盘4.3、变螺距螺杆4.4、上顶尖4.5、工作台4.6;
20、所述工作台4.6固定在机架8上,底部通过螺栓安装卡盘电机4.1,三爪卡盘4.3安装在工作台4.6上,通过卡盘电机4.1转动实现三爪卡盘4.3对变螺距螺杆4.4的夹持、释放以及旋转,因此线结构光传感器相对于被测工件增加了一个转动自由度f8,上顶尖4.5与三爪卡盘4.3同轴安装在工作台4.6上,圆形光栅4.2同轴安装在三爪卡盘4.3外侧,实时精确反馈变螺距螺杆4.4的角位移数据以实现测量角度姿态调整的全闭环,提高测量的准确性;
21、综上所述:在链轮模块1、装夹换向模块2、螺杆夹紧模块3共同工作下可以实现对变螺距螺杆的夹持、抬升、装夹换向的工序,同时线结构光传感器在转台模块4、角度调整模块5、位移调整模块6共同作用下具有横梁6.1上的x轴和z轴方向两个移动自由度f1和f2、d形架转轴5.12轴线方向上的转动自由度f3、双向丝杠5.3轴线方向上的两个移动自由度f4和f5、倾角调节舵机5.7上的两个转动自由度f6和f7、变螺距螺杆4.4轴线方向上的转动自由度f8,通过上述八个自由度可以使线结构光传感器在最优的角度、位置姿态获取变螺距螺杆的螺旋曲面的轮廓信息;
22、整个装置测量步骤如下:
23、第一步:将整个装置全部复原到初始位置。
24、第二步:操控螺杆夹紧模块3来夹紧变螺距螺杆4.4上下两端,装夹换向模块2进行90°的转向抬升工序,将变螺距螺杆4.4安装到转台模块4上。
25、第三步:操控位移调整模块6,调整线结构光传感器的位置,选择一个最佳测量位置。
26、第四步:调整两个线结构光传感器的距离,从而能够获取变螺距螺杆4.4左右两边的螺旋曲面轮廓信息。
27、第五步:调整两个线结构光传感器的测量姿态角,从而能够使其沿着变螺距螺杆4.4螺旋线法线发射激光。
28、第六步:变螺距螺杆4.4匀速旋转的同时,保证两个线结构光传感器时刻根据变螺距螺杆4.4的螺距、螺旋线法线的变化进行位置、角度的调整,待数据采集完成关闭整个装置。
29、第七步:测量结束,打印,输出三维坐标。
30、本发明的有益效果是:
31、1、本发明中设计可调节式自动装夹模块,可以用于小至大的各类型变螺距螺杆安装中,尺寸大、重量大导致的安装不便,装置的适用性强、安全性更高。
32、2、本发明中线结构光传感器具有八自由度,可针对变螺距螺杆螺旋线法线方向进行最优角度调整,避免光重反射现象,测量更加准确。
33、3、本发明中双线结构光传感器可得到比传统点线测量更完整的变螺距螺杆左右曲面,且测量效率更高。
- 还没有人留言评论。精彩留言会获得点赞!