一种变速器用传感器误差补偿方法、装置、介质及设备与流程
本申请涉及传感器调试,具体涉及一种变速器用传感器误差补偿方法、装置、介质及设备。
背景技术:
1、对于电动汽车多档位变速器,需要通过电机轴转速角传感器和输出轴转速角传感器实时监测接合套的转速转角,进而实现接合套和接合齿圈转速和转角同步。由于前述传感器在安装时可能存在偏心,导致转角反馈数据呈现周期性误差,为了辨识周期性误差,首先需要知道真实转角的大小,通用做法是通过加装一个精度更高的标准传感器对标,进而实现传感器误差补偿。但由于汽车变速器的构型有多种,某些构型下变速器的实际布置形式并不允许标准传感器的安装,导致了对传感器误差补偿难以进行。
技术实现思路
1、本申请的主要目的在于提供一种变速器用传感器误差补偿方法、装置、介质及设备,旨在解决现有技术中在无法加装标准传感器的情况下,对已有传感器的误差补偿难以实现的问题。
2、为实现上述目的,本申请的实施例采用的技术方案如下:
3、第一方面,本申请实施例提供一种变速器用传感器误差补偿方法,包括以下步骤:
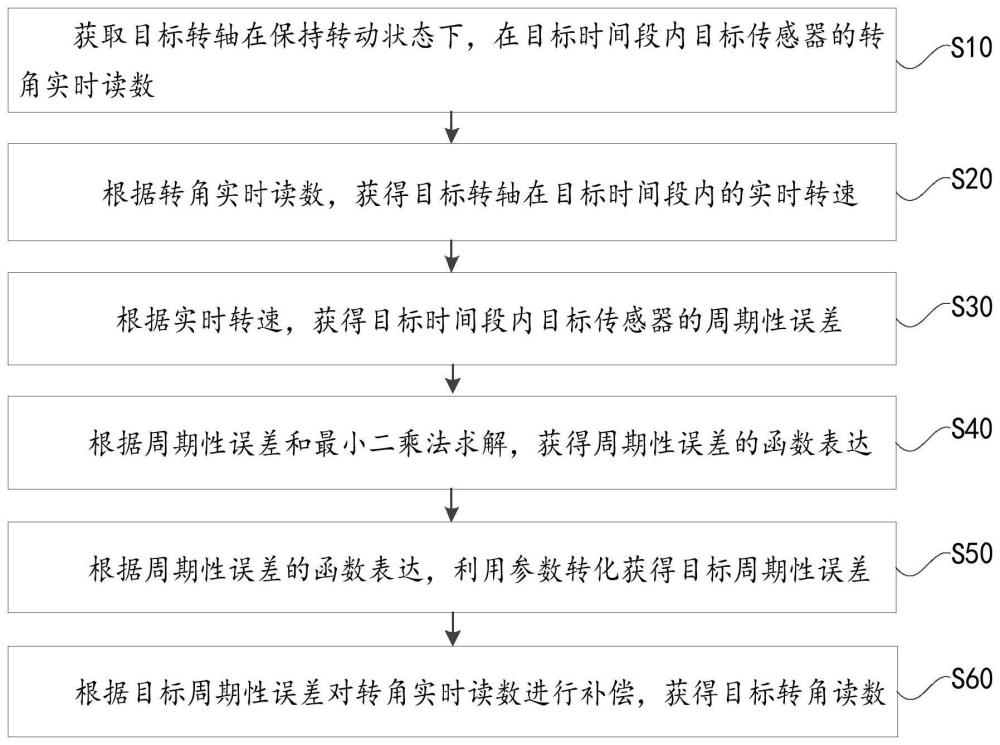
4、获取目标转轴在保持转动状态下,在目标时间段内目标传感器的转角实时读数;
5、根据转角实时读数,获得目标转轴在目标时间段内的实时转速;
6、根据实时转速,获得目标时间段内目标传感器的周期性误差;
7、根据周期性误差和最小二乘法求解,获得周期性误差的函数表达;
8、根据周期性误差的函数表达,利用参数转化获得目标周期性误差;
9、根据目标周期性误差对转角实时读数进行补偿,获得目标转角读数。
10、在第一方面的一种可能实现方式中,根据周期性误差和最小二乘法求解,获得周期性误差的函数表达,包括:
11、根据周期性误差和最小二乘法,构建误差平方和函数;
12、对误差平方和函数中的未知参数进行求解,获得目标参数;
13、根据目标参数,构建周期性误差的函数表达。
14、在第一方面的一种可能实现方式中,对误差平方和函数中的未知参数进行求解,获得目标参数,包括:
15、以偏导数等于零为条件,对误差平方和函数中的未知参数进行求解,获得目标参数。
16、在第一方面的一种可能实现方式中,根据目标参数,构建周期性误差的函数表达,包括:
17、根据目标参数进行方程拟合,构建周期性误差的函数表达曲线。
18、在第一方面的一种可能实现方式中,根据转角实时读数,获得目标转轴在目标时间段内的实时转速,包括:
19、根据转角实时读数,获得目标时间段内目标传感器反馈的首次转角读数和尾次转角读数;
20、根据首次转角读数、尾次转角读数以及目标时间段,获得目标转轴在目标时间段内的实时转速。
21、在第一方面的一种可能实现方式中,根据目标周期性误差对转角实时读数进行补偿,获得目标转角读数,包括:
22、根据目标周期性误差对转角实时读数进行补偿,获得转角实时读数与目标周期性误差的差值以作为目标转角读数。
23、在第一方面的一种可能实现方式中,获取目标转轴在保持转动状态下,在目标时间段内目标传感器的转角实时读数之前,变速器用传感器误差补偿方法还包括:
24、驱动目标转轴转动,以使目标转轴达到以第一转速转动的状态。
25、第二方面,本申请实施例提供一种变速器用传感器误差补偿装置,包括:
26、转角获得模块,转角获得模块用于获取目标转轴在保持转动状态下,在目标时间段内目标传感器的转角实时读数;
27、转速获得模块,转速获得模块用于根据转角实时读数,获得目标转轴在目标时间段内的实时转速;
28、第一误差获得模块,第一误差获得模块用于根据实时转速,获得目标时间段内目标传感器的周期性误差;
29、求解模块,求解模块用于根据周期性误差和最小二乘法求解,获得周期性误差的函数表达;
30、目标误差获得模块,目标误差获得模块用于根据周期性误差的函数表达,利用参数转化获得目标周期性误差;
31、补偿模块,补偿模块用于根据目标周期性误差对转角实时读数进行补偿,获得目标转角读数。
32、第三方面,本申请实施例提供一种计算机可读存储介质,储存有计算机程序,计算机程序被处理器加载执行时,实现如上述第一方面中任一项提供的变速器用传感器误差补偿方法。
33、第四方面,本申请实施例提供一种电子设备,包括处理器及存储器,其中,
34、存储器用于存储计算机程序;
35、处理器用于加载执行计算机程序,以使电子设备执行如上述第一方面中任一项提供的变速器用传感器误差补偿方法。
36、与现有技术相比,本申请的有益效果是:
37、本申请实施例提出的一种变速器用传感器误差补偿方法、装置、介质及设备,该方法包括:获取目标转轴在保持转动状态下,在目标时间段内目标传感器的转角实时读数;根据转角实时读数,获得目标转轴在目标时间段内的实时转速;根据实时转速,获得目标时间段内目标传感器的周期性误差;根据周期性误差和最小二乘法求解,获得周期性误差的函数表达;根据周期性误差的函数表达,利用参数转化获得目标周期性误差;根据目标周期性误差对转角实时读数进行补偿,获得目标转角读数。
38、本申请通过在转轴保持转动的状态下,获得一段时间内通过转角传感器反馈的转角实时读数,然后将其转换为在该段时间内的实时转速,通过实时转速来得到目标时间段内的周期性误差表达,然后利用最小二乘法求解,推算出完整的周期性误差的函数表达,利用参数转化得到最终的周期性误差,最后根据该周期性误差对传感器反馈的转角实时读数进行补偿,也即实现了无标准传感器参与下的传感器误差补偿。
技术特征:
1.一种变速器用传感器误差补偿方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的变速器用传感器误差补偿方法,其特征在于,所述根据所述周期性误差和最小二乘法求解,获得所述周期性误差的函数表达,包括:
3.根据权利要求2所述的变速器用传感器误差补偿方法,其特征在于,所述对所述误差平方和函数中的未知参数进行求解,获得目标参数,包括:
4.根据权利要求2所述的变速器用传感器误差补偿方法,其特征在于,所述根据所述目标参数,构建所述周期性误差的函数表达,包括:
5.根据权利要求1所述的变速器用传感器误差补偿方法,其特征在于,所述根据所述转角实时读数,获得所述目标转轴在所述目标时间段内的实时转速,包括:
6.根据权利要求1所述的变速器用传感器误差补偿方法,其特征在于,所述根据所述目标周期性误差对所述转角实时读数进行补偿,获得目标转角读数,包括:
7.根据权利要求1所述的变速器用传感器误差补偿方法,其特征在于,所述获取目标转轴在保持转动状态下,在目标时间段内目标传感器的转角实时读数之前,所述变速器用传感器误差补偿方法还包括:
8.一种变速器用传感器误差补偿装置,其特征在于,包括:
9.一种计算机可读存储介质,储存有计算机程序,其特征在于,所述计算机程序被处理器加载执行时,实现如权利要求1-7中任一项所述的变速器用传感器误差补偿方法。
10.一种电子设备,其特征在于,包括处理器及存储器,其中,
技术总结
本申请的实施例公开了一种变速器用传感器误差补偿方法、装置、介质及设备,涉及传感器调试技术领域,本申请通过在转轴保持转动的状态下,获得一段时间内通过转角传感器反馈的转角实时读数,然后将其转换为在该段时间内的实时转速,通过实时转速来得到目标时间段内的周期性误差表达,然后利用最小二乘法求解,推算出完整的周期性误差的函数表达,利用参数转化得到最终的周期性误差,最后根据该周期性误差对传感器反馈的转角实时读数进行补偿,也即实现了无标准传感器参与下的传感器误差补偿。
技术研发人员:隋立起,王立军,田丰,樊刚,陈红旭
受保护的技术使用者:宜宾丰川动力科技有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!