导航系统的定位修正方法、装置、存储介质及车辆与流程
本申请涉及车辆,尤其涉及一种导航系统的定位修正方法、装置、存储介质及车辆。
背景技术:
1、随着车辆在人们生活中的普及,卫星导航系统也已成为车辆的标配之一,人们对导航准确度的要求也越来越高。
2、但是,当经过隧道或被遮挡的空间时,车辆接收到的卫星信号会被遮挡变弱或甚至根本无法接收到卫星信号,使得车辆中的导航系统无法为用户提供准确定位。另外,隧道或被遮挡的空间中往往光线较暗,如果车辆没有准确定位,很容易发生事故。
技术实现思路
1、本申请实施例提供了一种导航系统的定位修正方法、装置、存储介质及车辆,以解决在卫星信号较弱或无卫星信号时导航不准确的问题。
2、第一方面,本申请实施例提供了一种导航系统的定位修正方法,包括:
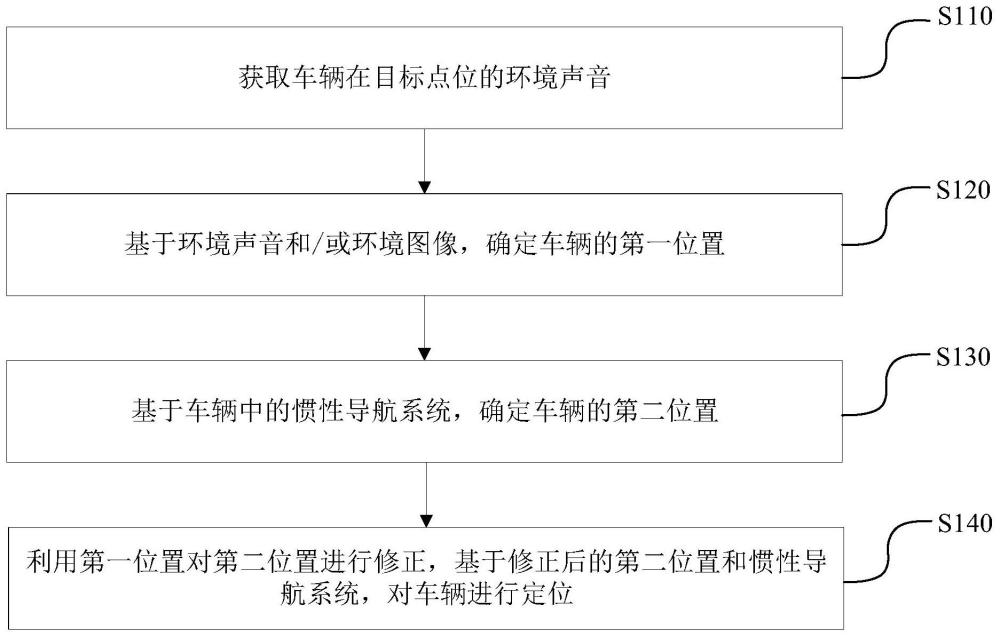
3、获取车辆在目标点位的环境声音;其中,车辆在目标点位接收到的卫星信号的强度低于预设强度阈值;
4、基于环境声音,确定车辆的第一位置;
5、基于车辆中的惯性导航系统,确定车辆的第二位置;
6、利用第一位置对第二位置进行修正,基于修正后的第二位置和惯性导航系统,对车辆进行定位。
7、在一种可能的实现方式中,基于环境声音,确定车辆的第一位置,包括:
8、获取预存的第一导航地图中目标点位的声音特征数据;其中,第一导航地图包括不同位置的声音特征数据;
9、将环境声音与目标点位的声音特征数据相匹配,确定车辆的第一位置。
10、在一种可能的实现方式中,将环境声音与目标点位的声音特征数据相匹配,包括:
11、对环境声音进行滤波处理;
12、基于动态时间规整算法,对滤波处理后的环境声音与目标点位的声音特征数据进行匹配。
13、在一种可能的实现方式中,目标点位的声音特征数据包括目标点位的声音特征的特征矩阵;
14、基于动态时间规整算法,对滤波处理后的环境声音与目标点位的声音特征数据进行匹配,包括:
15、对滤波处理后的环境声音进行梅尔频率倒谱系数特征提取,得到滤波处理后的环境声音的特征矩阵;
16、基于于动态时间规整算法,对滤波处理后的环境声音的特征矩阵和目标点位的声音特征数据的特征矩阵进行匹配。
17、在一种可能的实现方式中,目标点位的声音特征数据包括目标点位的声音特征的声纹信息;
18、将环境声音与目标点位的声音特征数据相匹配,包括:
19、对环境声音进行滤波处理;
20、提取滤波处理后的环境声音的声纹信息;
21、对滤波处理后的环境声音的声纹信息和目标点位的声音特征数据的声纹信息进行匹配。
22、在一种可能的实现方式中,还包括:
23、获取车辆在目标点位的光强值;
24、当光强度大于预设光强阈值时,获取车辆在目标点位的环境图像;
25、基于环境图像,确定车辆的第三位置;
26、基于第一位置和第三位置,确定车辆的第四位置;
27、利用第四位置对第二位置进行修正,基于修正后的第二位置和惯性导航系统,对车辆进行定位。
28、在一种可能的实现方式中,基于第一位置和第三位置,确定车辆的第一位置,包括:
29、获取预设声音特征权重和预设图像特征权重;
30、计算第一位置与预设声音特征权重的乘积,以及第三位置与预设图像特征权重的乘积,并将两个乘积的和值作为车辆的第四位置。
31、第二方面,本申请实施例提供了一种导航系统的定位修正装置,包括:
32、获取信息模块,用于获取车辆在目标点位的环境声音;其中,车辆在目标点位接收到的卫星信号的强度低于预设强度阈值;
33、第一确定模块,用于基于环境声音,确定车辆的第一位置;
34、第二确定模块,用于基于车辆中的惯性导航系统,确定车辆的第二位置;
35、修正模块,用于利用第一位置对第二位置进行修正,基于修正后的第二位置和惯性导航系统,对车辆进行定位。
36、第三方面,本申请实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上第一方面或第一方面的任一种可能的实现方式所述方法的步骤。
37、第四方面,本申请实施例提供了一种车辆,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上第一方面或第一方面的任一种可能的实现方式所述方法的步骤。
38、本申请实施例考虑到车辆在卫星信号较弱且光线较暗的地方行驶时,仅基于车辆中的惯性导航系统和图像匹配定位无法提供准确地定位,提供一种导航系统的定位修正方法、装置、存储介质及车辆,通过获取车辆在目标点位的环境声音;接着,基于环境声音,确定车辆的第一位置,进而,基于车辆中的惯性导航系统确定车辆的第二位置。从而,利用第一位置对第二位置进行修正,基于修正后的第二位置和惯性导航系统,对车辆定位。其中,本申请实施例在卫星信号较弱且光线较暗的地方行驶时,考虑到无法准确地获取到车辆周边的图像,因此结合车辆所在的环境声音,以及惯性导航系统,对车辆进行定位,实现了车辆在卫星信号较弱或无信号的地方的准确定位,提高了定位的准确度,方便用户行驶。
技术特征:
1.一种导航系统的定位修正方法,其特征在于,包括:
2.如权利要求1所述的定位修正方法,其特征在于,基于所述环境声音,确定所述车辆的第一位置,包括:
3.如权利要求2所述的定位修正方法,其特征在于,所述将所述环境声音与所述目标点位的声音特征数据相匹配,包括:
4.如权利要求3所述的定位修正方法,其特征在于,所述目标点位的声音特征数据包括所述目标点位的声音特征的特征矩阵;
5.如权利要求2所述的定位修正方法,其特征在于,所述目标点位的声音特征数据包括所述目标点位的声音特征的声纹信息;
6.如权利要求1所述的定位修正方法,其特征在于,所述方法还包括:
7.如权利要求6所述的定位修正方法,其特征在于,所述基于所述第一位置和所述第三位置,确定所述车辆的第四位置,包括:
8.一种导航系统的定位修正装置,其特征在于,包括:
9.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述方法的步骤。
10.一种车辆,其特征在于,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7任一项所述的方法。
技术总结
本申请提供导航系统的定位修正方法、装置、存储介质及车辆,该方法包括:获取车辆在目标点位的环境声音;其中,车辆在目标点位接收到的卫星信号的强度低于预设强度阈值;基于环境声音,确定车辆的第一位置;基于车辆中的惯性导航系统,确定车辆的第二位置;利用第一位置对第二位置进行修正,基于修正后的第二位置和惯性导航系统,对车辆进行定位。本申请提供的定位修正方法通过获取车辆在目标点位的环境信息,接着,基于环境声音确定车辆的第一位置,进而,基于车辆中的惯性导航系统确定车辆的第二位置。从而,基于第一位置和第二位置,实现了车辆在卫星信号较弱的地方的准确定位,方便用户行驶。
技术研发人员:何祥滨
受保护的技术使用者:长城汽车股份有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!