自动光学检测方法及系统与流程
本发明属于涉及自动光学检测、视觉检测,尤其涉及一种自动光学检测方法及系统。
背景技术:
1、随着机器视觉技术的发展,自动光学检测设备广泛应用于集成电路、半导体领域的高端精密检测场景,替代人眼完成产品的质量检测。自动光学检测设备能够极大的提高检测速度和精度,提高检测效率,防止人眼疲劳带来的检测不一致性。
2、当前,主流的自动光学检测设备以在线式为主,通过传送装置将待检零件传送到指定位置,基于已编好的程序控制相机移动进行缺陷检测。例如,申请号为cn201811526166.1的中国发明专利《一种适用于人工智能检测pcb的自动光学检测装置及其方法》提出了一种检测pcb的自动光学检测装置和方法,包括传输平台、第一移动支架、第二移动支架及扫描相机。该种方式往往编程复杂,适用于批量大、尺寸大的检测对象,不适用于无法定位在传送装置上的微小检测对象。
技术实现思路
1、本发明的目的在于提供一种自动光学检测方法及系统,适用于无法定位在传送装置上的微小检测对象,具有精度高、兼容性强、检测速度快的优点。本发明采用的技术方案如下:
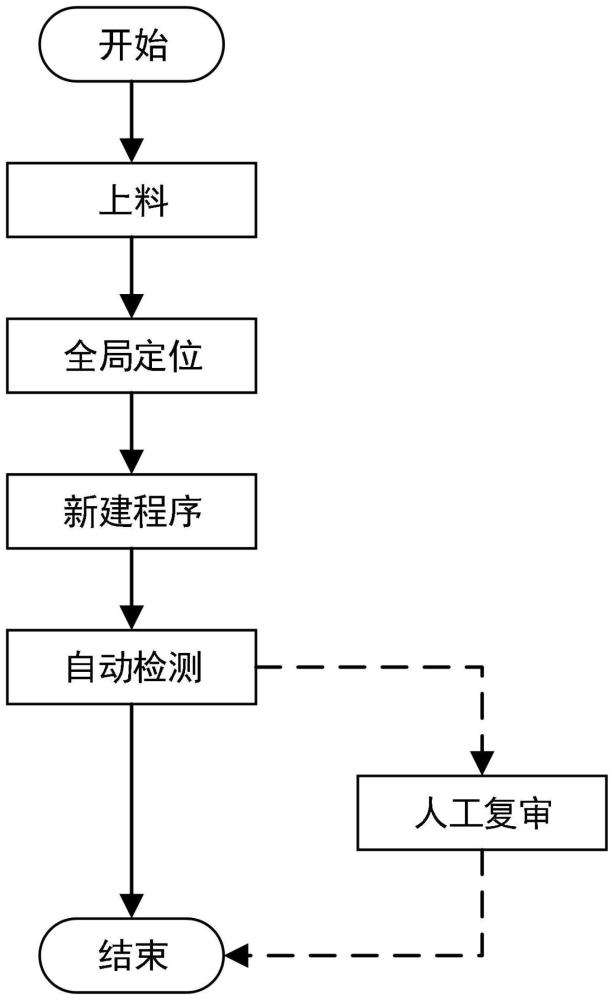
2、一种自动光学检测方法,包括以下步骤:
3、步骤1、上料,具体包括以下步骤:
4、将存放待检测对象的料盒放入夹紧单元,夹紧单元自动夹紧料盒;检测对象摆放在料盒中;夹紧单元安装于xy运动平台,带动检测对象实现平面运动;
5、步骤2、全局定位,具体包括以下步骤:
6、控制xy平台将料盒移动至大视野相机下方,拍摄料盒全局图片,执行全局定位算法,获得料盒中检测对象的数量n,以及每个检测对象的中心图像坐标(xi,yi),i∈(1,n);
7、步骤3、坐标转换,以求取每个检测对象的中心图像坐标(xi,yi)与高分辨率相机图像正中心重合时的物理坐标(xi',yi'),具体包括以下步骤:
8、步骤3a、获取x方向图像像素距离与物理距离的对应关系px,具体包括以下步骤:
9、控制xy运动平台将mark点移动到大视野相机下方,拍摄全局图像,记录mark点在全局图像中的图像坐标(x1,y1);其中,mark点为料盒上的一个任意点;
10、控制xy平台沿x方向移动距离l1,记录移动后mark点在全局图像中的图像坐标(x2,y1);
11、可得到x方向图像像素距离与物理距离的对应关系:
12、步骤3b、获取y方向图像像素距离与物理距离的对应关系py,具体包括以下步骤:
13、控制xy运动平台将mark点移动到大视野相机下方,拍摄全局图像,记录mark点在全局图像中的图像坐标(x1,y1);
14、控制xy平台沿y方向移动距离l2,记录移动后mark点在全局图像中的图像坐标(x1,y2);
15、可得到y方向图像像素距离与物理距离的对应关系:
16、步骤3c、首先,控制xy运动平台将夹紧单元移动至大视野相机正下方,记录此时mark点在全局图像中的坐标(xc,yc);
17、然后,将夹紧单元移动至高分辨率相机下方,使mark点位于高分辨率相机图像正中心,记录此时mark点的物理坐标(x'c,y'c);
18、步骤3d、对于步骤2中的每个检测对象的中心图像坐标(xi,yi),i∈(1,n),可得其对应物理坐标(xi',yi'),i∈(1,n),其中:
19、
20、步骤4、人工选择一个合格的检测对象,移动到高分辨率相机下方;
21、步骤5、执行自动对焦,获得检测对象的高清图像,编程模块根据高清图像设置检测算法参数,并保存程序模板;
22、步骤6、自动检测,具体包括以下步骤:
23、步骤6a、根据步骤3d中输出的物理坐标(xi',yi'),控制xy平台移动第i个检测对象运动到高分辨率相机下方;
24、步骤6b、自动对焦模块输出当前检测对象的高清图像,通过图像采集模块发送至消息队列;
25、步骤6c、图像处理模块从消息队列中获取图像,根据编程模块中的程序模板进行检测,输出检测结果,并将检测结果保存至数据库模块;记i=i+1;
26、步骤6d:若i<n,重复执行步骤6a~6c,直至i=n,即所有检测对象检测完成。
27、优选地,步骤5中编程模块具体执行以下步骤:
28、步骤5a、设置光源类型和亮度;
29、步骤5b、设置忽略区域;
30、步骤5c、设置检测灵敏度、检测阈值;
31、步骤5d、保存程序模板。
32、优选地,步骤5中自动对焦具体包括以下步骤:
33、步骤51、将检测对象移动至高分辨率相机下方,开启相机实时拍照;
34、步骤52、设定对焦距离δ,控制z轴升降机构向负方向移动δ距离,之后控制z轴升降机构向正方向移动2δ距离;
35、移动过程中实时采集高分辨率相机图像,获得图像集合{p1,p2,……pj},以及其对应的z轴坐标集合{z1,z2,……zj};
36、其中,j为实时采集图像的总数量;pj为第j张图像;
37、步骤53、对图像集合{p1,p2,……pj}中的每张图像计算清晰度,获得清晰度集合{s1,s2,……sj};
38、其中,sj为第j张图像的清晰度;
39、步骤54、取清晰度最高的图像的索引imax=max({s1,s2,……sj}),则清晰度最高的图像对应的z轴坐标为
40、步骤55、控制z轴移动到重新拍摄一张图像,则此时图像为对焦清晰的高清图像。
41、优选地,步骤5之后还包括以下步骤:
42、人工复审,由人工对自动检测的结果进行复核,对漏判或误判工件进行重新判定,并将结果更新到数据库模块中。
43、一种自动光学检测系统,包括:
44、图像采集模块,实现多相机的控制和图像采集,其包括:大视野相机和高分辨率相机,大视野相机用于检测对象的定位,高分辨率相机用于检测对象的高精度检测;高分辨率相机、大视野相机和光源模块安装于z轴升降机构上;
45、图像处理模块,实现图像的异步处理,输出检测结果至数据库模块;
46、运动控制模块,实现各个运动轴的控制,其包括xy运动平台和z轴升降平台,夹紧单元安装于xy运动平台,xy运动平台带动检测对象实现平面运动;z轴升降平台包括所述z轴升降机构;
47、自动对焦模块,实现检测对象图像的自动对焦;
48、编程模块,用于设置检测算法参数,制作程序模板;
49、自动标定模块,用于对实现图像坐标系和运动坐标系的标定;
50、夹紧单元,实现料盒的夹紧。
51、优选地,所述光源模块,实现光源的参数设置和开光控制,包括:大视野相机同轴光源和组合光源;
52、所述大视野相机同轴光源安装于大视野相机下方,为大视野相机提供照明;
53、组合光源包括组合同轴光源和组合环形光源,安装于高分辨率相机下方,组合同轴光源为高分辨相机提供明场照明,组合环形光源提供暗场照明。
54、与现有技术相比,本发明的优点为:
55、1、该方法具有精度高、速度快的优点:包括上料、全局定位、坐标变换、设置程序模板及自动检测,因此,只需要点击全局图片上的检测对象,xy平台即可将对应检测对象移动到高分辨率相机下方,后续由程序模块、自动对焦模块、图像处理模块配合,实现对所有检测对象的自动检测。因此,该方法具有精度高、速度快的优点。
56、2、适用于无法定位在传送装置上的微小检测对象。且解决了现有技术中,针对微小尺度零件的高精度检测方法,例如芯片裸片,仍依赖于人工使用显微镜等工具进行检测,检测效率低,劳动强度大,且人眼疲劳造成的漏检频发的问题。
- 还没有人留言评论。精彩留言会获得点赞!