基于无人船的水污染达标控制方法及系统与流程
本发明涉及水质监测领域,具体地指基于无人船的水污染达标控制方法及系统。
背景技术:
1、水质健康评估以及污染物的溯源追踪对于水环境实行更全面细致的保护至关重要。水体污染的产生原因和过程十分复杂,污染源头、发生时间以及污染种类具有较大的不确定性和多样性。当污染排放成分和特征不明确时,利用传统的人工水质取样调查分析进行调查则需要耗费大量的人力物力,且分析过程耗时长。利用固定的水质监测站进行水污染评估时,水质监测传感器获得的信息数据比较庞大,计算比较复杂,且不确定度大、污染成分解析结果可能存在非唯一性,且因为站点的稀疏性难以进行污染源溯源识别,另外,河流中可能同时存在多点位污染,尤其是化学组分较相似的多点位污染,难以通过上下游断面关系进行水量-水质模拟。
2、随着新的污染特征识别方法及监测手段的开发应用,河流污染的溯源识别手段也愈加丰富。其中基于三维荧光法的水污染识别及溯源技术(“水指纹”法),成功地应用于流域排口追踪溯源,该技术是利用每个污染源独特的三维荧光特征图谱进行比对,在具有完整的数据库条件下,能快速、准确地进行水污染溯源。但是在污染排口隐蔽、成分相似度高的流域环境中,难以建立有效的比对数据库,识别率成功率较低。
3、随着水质监测手段不断丰富,水污染溯源技术探索也呈现出多样化,但现有技术的精准溯源需要海量历史数据建立水质信息库、密集的监测设备和站点,有些技术仅适用于单次污染过程追踪溯源,难以适用于老旧城区河道复杂污染成因环境,因此,如何快速、精准地进行污染源识别,不仅是一项亟待解决的科学问题,也是水环境治理工程中亟需攻克的工程技术问题。
技术实现思路
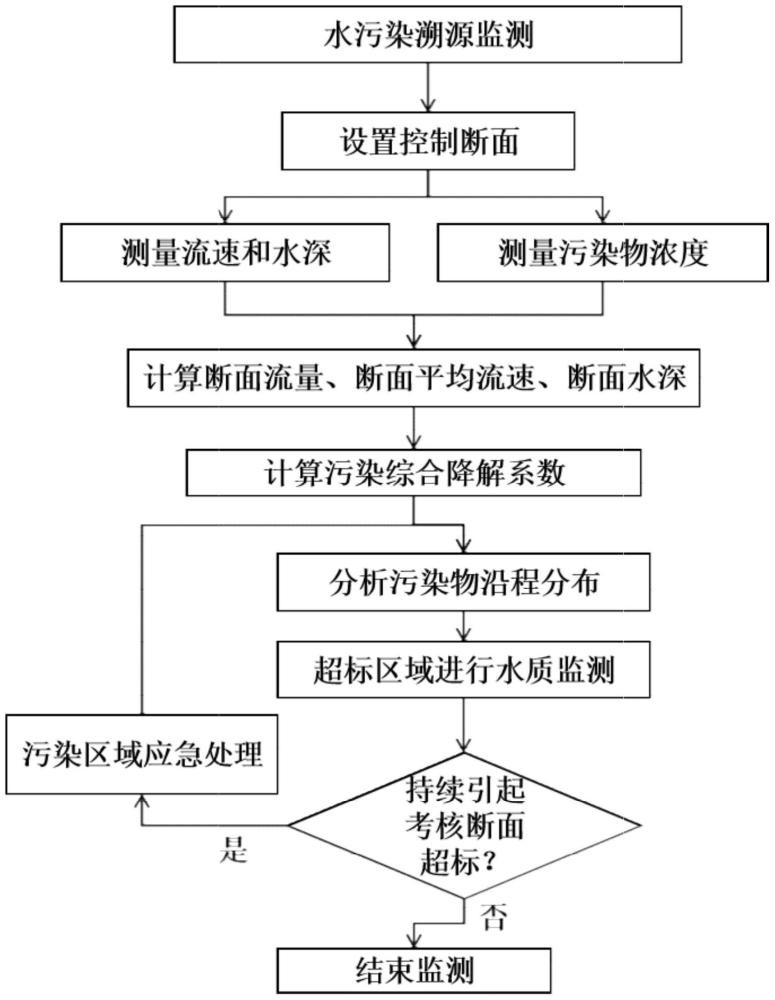
1、本发明的目的就是解决上述背景中,在河道水质监测过程中工作量大、人力投入高,检测时效性差、运维要求高,且监测断面密度低难以进行污染溯源等难题,提出了一种基于无人船的水污染达标控制方法,包括以下步骤:
2、s1、选择控制断面,居民区及工业区上下游、支流交汇处、水流条件变化大位置设置控制断面;
3、s2、采用无人船测量断面水深、流速信息及污染物浓度信息;
4、s3、根据公式计算断面流量、平均水深、平均流速;
5、s4、根据上下游断面计算河段糙率和污染物综合降解系数;
6、s5、基于水质模型计算河道污染物分布;
7、s6、对污染物浓度超过管控标准区域进行水质监测,并对突发性水污染事件启动应急处理。
8、优选的方案中,步骤s2中,水深、流速及污染物信息,分别采用无人船搭载的测深仪、流速仪及水质监测仪实时测量。
9、优选的方案中,断面流量、平均水深、平均流速采用如下方法计算:
10、断面流量计算方法:
11、
12、其中,
13、
14、断面平均流速计算方法:
15、
16、断面平均水深计算方法:
17、
18、优选的方案中,步骤s4中,河段糙率和污染物综合降解系数计算方法如下:
19、河段糙率计算方法:
20、
21、污染物综合降解系数计算方法:
22、
23、优选的方案中,步骤s5中,河道污染物分布计算方法如下:
24、
25、本发明还提出了一种基于无人船的水污染达标控制系统,包括:水质取样及监测模块、水文监测模块和控制、定位及数据分析模块。
26、优选的方案中,基于无人船的水污染溯源系统还包括辅助模块;
27、辅助模块负责通讯、供电、动力、避障和摄影摄像;
28、通讯功能由通讯接受和发生器以及天线实现,通过4g和无线遥控通讯以及数据传输;
29、供电系统主要由可拆卸电池供电;动力系统主要由旋浆或泵推器提供,并具备一定的防缠绕能力,避免水草和杂物的影响;
30、避障模块由避障雷达提供前方障碍物信息,并对控制器发送指令,实现避障功能;
31、摄影摄像功能主要由船体前方的摄像头提供;
32、航行状态灯主要用于船体姿态观测和运行状态显示。
33、优选的方案中,水质取样及监测模块具备水质采样功能并根据任务需求选择性搭载水质监测仪器进行水质原位监测;
34、优选的方案中,水文监测模块搭载流速仪和测深仪,获取测点的实时流速和水深信息;
35、优选的方案中,控制、定位及数据分析模块内置无人船自动控制算法、水质数据和水文数据处理分析算法,实时自动根据预设任务、实测数据控制无人船执行规划任务并分析得到监测河段水污染分布情况。
36、本发明的有益效果为:
37、(1)无人船可依据实际需求选择所需监测污染物指标的探头或者仪器,并搭载了可测量流速和水深的探测器,可实时获取测点的水文水质信息;
38、(2)无人船控制系统可依据定位功能数据自动校正推进器,进行单点稳定或匀速直线航行,提高测点数据精度,并可获取测量断面数据;
39、(3)依据测点流速水深信息,提出了断面流量、平均流速和平均水深的计算方法,并内置入数据分析模块,在测量断面信息时可自动计算断面水文要素;
40、(4)将断面水文和水质数据带入水质模型中,可实现监测河道沿程污染分布及污染溯源,并可实时监测评估应急处理效果。
技术特征:
1.一种基于无人船的水污染达标控制方法,其特征是包括以下步骤:
2.根据权利要求1所述基于无人船的水污染达标控制方法,其特征在于,步骤s2中,水深、流速及污染物信息,分别采用无人船搭载的测深仪、流速仪及水质监测仪实时测量。
3.根据权利要求1所述基于无人船的水污染达标控制方法,其特征在于,步骤s3中,断面流量、平均水深、平均流速采用如下方法计算:
4.根据权利要求1所述基于无人船的水污染达标控制方法,其特征在于,步骤s4中,河段糙率和污染物综合降解系数计算方法如下:
5.根据权利要求1所述基于无人船的水污染达标控制方法,其特征在于,步骤s5中,河道污染物分布计算方法如下:
6.一种基于无人船的水污染达标控制系统,其特征在于,包括:水质取样及监测模块、水文监测模块和控制、定位及数据分析模块。
7.根据权利要求6所述基于无人船的水污染达标控制系统,其特征在于,还包括辅助模块;
8.根据权利要求6所述基于无人船的水污染达标控制系统,其特征在于,水质取样及监测模块具备水质采样功能并根据任务需求选择性搭载水质监测仪器进行水质原位监测。
9.根据权利要求6所述基于无人船的水污染达标控制系统,其特征在于,水文监测模块搭载流速仪和测深仪,获取测点的实时流速和水深信息。
10.根据权利要求6所述基于无人船的水污染达标控制系统,其特征在于,控制、定位及数据分析模块内置无人船自动控制算法、水质数据和水文数据处理分析算法,实时自动根据预设任务、实测数据控制无人船执行规划任务并分析得到监测河段水污染分布情况。
技术总结
本发明提供了一种基于无人船的水污染达标控制方法及系统,包括水质取样及监测单元、水文监测单元,控制、定位及数据分析单元、其它辅助单元等四个单元。水质取样及监测单元可进行水质采样或选择性搭载水质监测仪器进行水质原位监测;水文监测单元搭载流速仪和测深仪,可获取测点的二维流速和水深信息;控制、定位及数据分析单元可实现无人船自动或手动测量、数据分析计算及远程传输等功能;其它辅助单元主要为供电系统、动力系统、通讯系统、避障系统、摄像系统等。本发明的有益效果是该系统通过不同的模块单元实现对河道水质的巡航监测,并依据测量数据构建了水质水量计算方法,实现水污染趋势分析及溯源追踪。
技术研发人员:陈文峰,黄胜,冯立辉,徐扬帆,王龙涛,白尧,陈浩,李世汨,夏新星,张洋,万沙,张旭
受保护的技术使用者:中交第二航务工程局有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!