障碍物检测方法、装置、车辆、设备和介质与流程
本发明涉及超声波测距,尤其涉及一种障碍物检测方法、装置、车辆、设备和介质。
背景技术:
1、随着自动驾驶技术不断发展,为确保自主车辆的安全运行,相关技术多通过车上的雷达扫描周围环境,进行障碍物检测。然而,现有的雷达多是“收发一体”,即同一个雷达传感器既负责发送超声波信号,也负责接收回波信号,进而在检测过程中会产生余震,影响障碍物检测精度。
技术实现思路
1、本发明提供一种障碍物检测方法、装置、车辆、设备和介质,用以解决现有技术中障碍物检测精度较低的缺陷。
2、本发明提供一种障碍物检测方法,包括:
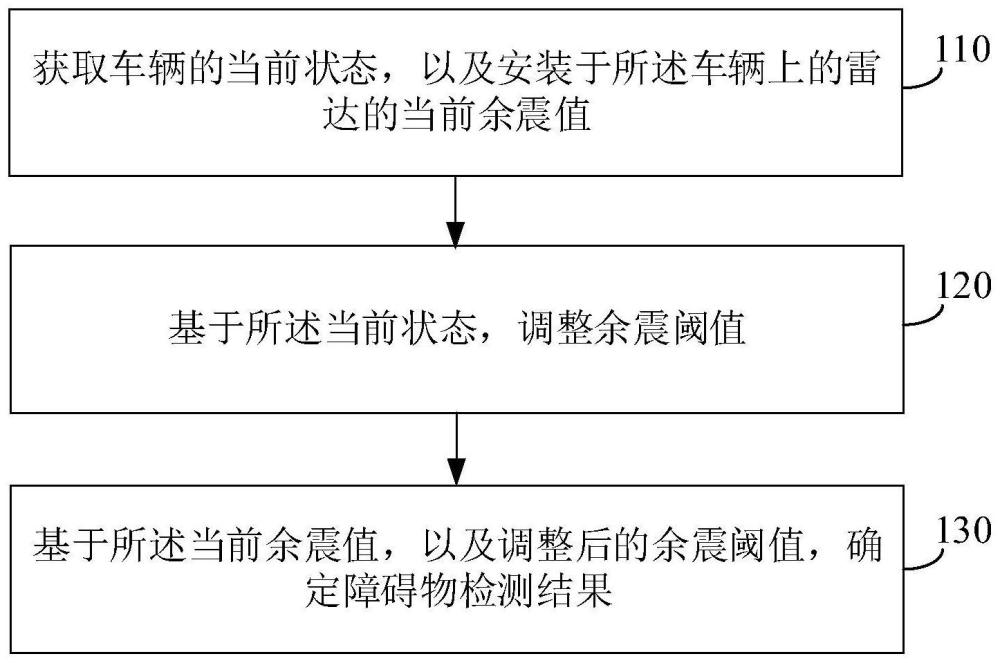
3、获取车辆的当前状态,以及安装于所述车辆上的雷达的当前余震值;
4、基于所述当前状态,调整余震阈值;
5、基于所述当前余震值,以及调整后的余震阈值,确定障碍物检测结果。
6、根据本发明提供的一种障碍物检测方法,所述基于所述当前余震值,以及调整后的余震阈值,确定障碍物检测结果,包括:
7、在所述雷达的探测距离值大于零且小于等于测距阈值的情况下,基于所述当前余震值,以及调整后的余震阈值,确定所述障碍物检测结果。
8、根据本发明提供的一种障碍物检测方法,所述基于所述当前余震值,以及调整后的余震阈值,确定所述障碍物检测结果,包括:
9、基于所述当前余震值与正常余震值,确定余震变化值,所述正常余震值用于表征无障碍物状态下雷达的余震值;
10、基于所述余震变化值,以及调整后的余震阈值,确定所述障碍物检测结果。
11、根据本发明提供的一种障碍物检测方法,所述基于所述余震变化值,以及调整后的余震阈值,确定所述障碍物检测结果,包括:
12、在所述余震变化值大于调整后的余震阈值的情况下,确定所述障碍物检测结果为存在障碍物。
13、根据本发明提供的一种障碍物检测方法,所述测距阈值是基于所述车辆的当前速度对初始测距阈值进行调整后得到的。
14、根据本发明提供的一种障碍物检测方法,所述基于所述车辆状态,调整余震阈值,包括:
15、基于所述车辆状态,以及所述雷达的回波信号高度,调整所述余震阈值。
16、本发明还提供一种障碍物检测装置,包括:
17、获取单元,用于获取车辆的当前状态,以及安装于所述车辆上的雷达的当前余震值;
18、调整单元,用于基于所述当前状态,调整余震阈值;
19、检测单元,用于基于所述当前余震值,以及调整后的余震阈值,确定障碍物检测结果。
20、本发明还提供一种车辆,包括:
21、至少一个雷达,以及如上所述的障碍物检测装置。
22、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述任一种所述障碍物检测方法。
23、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述障碍物检测方法。
24、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述障碍物检测方法。
25、本发明提供的障碍物检测方法、装置、车辆、设备和介质,基于当前状态,实时调整余震阈值,从而能够基于调整后的余震阈值,以及当前余震值,准确确定障碍物检测结果。
技术特征:
1.一种障碍物检测方法,其特征在于,包括:
2.根据权利要求1所述的障碍物检测方法,其特征在于,所述基于所述当前余震值,以及调整后的余震阈值,确定障碍物检测结果,包括:
3.根据权利要求2所述的障碍物检测方法,其特征在于,所述基于所述当前余震值,以及调整后的余震阈值,确定所述障碍物检测结果,包括:
4.根据权利要求3所述的障碍物检测方法,其特征在于,所述基于所述余震变化值,以及调整后的余震阈值,确定所述障碍物检测结果,包括:
5.根据权利要求2所述的障碍物检测方法,其特征在于,所述测距阈值是基于所述车辆的当前速度对初始测距阈值进行调整后得到的。
6.根据权利要求1至5任一项所述的障碍物检测方法,其特征在于,所述基于所述车辆状态,调整余震阈值,包括:
7.一种障碍物检测装置,其特征在于,包括:
8.一种车辆,其特征在于,包括:
9.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至6任一项所述障碍物检测方法。
10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述障碍物检测方法。
技术总结
本发明提供一种障碍物检测方法、装置、车辆、设备和介质,所述方法包括:获取车辆的当前状态,以及安装于车辆上的雷达的当前余震值;基于当前状态,调整余震阈值;基于当前余震值,以及调整后的余震阈值,确定障碍物检测结果。本发明提供的障碍物检测方法、装置、车辆、设备和介质,基于当前状态,实时调整余震阈值,从而能够基于调整后的余震阈值,以及当前余震值,准确确定障碍物检测结果。
技术研发人员:叶正强,吴涛,孙其龙
受保护的技术使用者:科大讯飞股份有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!