一种基于激光传感器的探针变距方法、系统、设备及介质与流程
本发明涉及电池包检测,特别指一种基于激光传感器的探针变距方法、系统、设备及介质。
背景技术:
1、随着新能源汽车的快速发展,作为新能源汽车动力源的电池包的性能检测越来越重要,且电池包的产品越来越多样化。由于每款型号电池包的巴片位置不一致,即正负极柱间距不一致,生产线为兼容多型号电池包的检测,需要调整探针的间距,即对探针进行换型。
2、针对探针的换型,传统上由人工移动安装探针的探针块,即每换型一次均需要人工操作一次,导致换型效率低下,进而影响电池包的检测效率。因此,如何提供一种基于激光传感器的探针变距方法、系统、设备及介质,实现提升探针换型效率,成为一个亟待解决的技术问题。
技术实现思路
1、本发明要解决的技术问题,在于提供一种基于激光传感器的探针变距方法、系统、设备及介质,实现提升探针换型效率。
2、第一方面,本发明提供了一种基于激光传感器的探针变距方法,包括如下步骤:
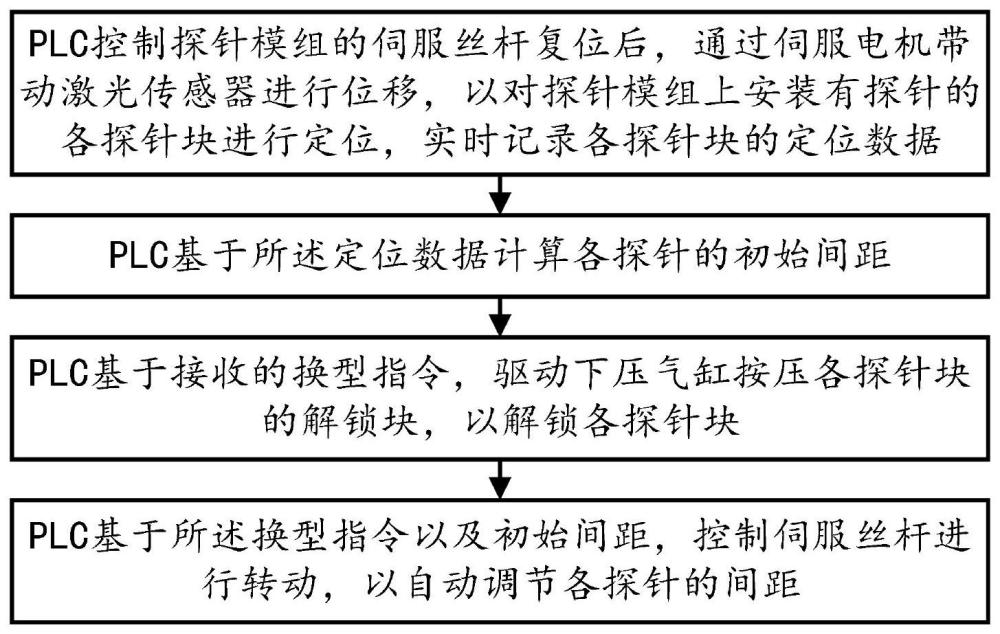
3、步骤s1、plc控制探针模组的伺服丝杆复位后,通过伺服电机带动激光传感器进行位移,以对探针模组上安装有探针的各探针块进行定位,实时记录各探针块的定位数据;
4、步骤s2、plc基于所述定位数据计算各探针的初始间距;
5、步骤s3、plc基于接收的换型指令,驱动下压气缸按压各探针块的解锁块,以解锁各探针块;
6、步骤s4、plc基于所述换型指令以及初始间距,控制伺服丝杆进行转动,以自动调节各探针的间距。
7、进一步的,所述步骤s2具体为:
8、plc基于所述定位数据以及探针在探针块上的安装位置,自动计算各探针的初始间距以及初始位置,将所述初始间距以及初始位置写入安装于探针块的rfid芯片内。
9、进一步的,所述步骤s3具体为:
10、plc基于接收的携带目标间距的换型指令,驱动下压气缸按压各探针块的解锁块,以解锁各探针块。
11、进一步的,所述步骤s4具体为:
12、plc基于所述换型指令携带的目标间距以及初始间距计算移动距离,基于所述移动距离控制伺服丝杆进行顺时针转动或者逆时针转动,以自动调节各探针的间距,通过激光传感器测量各探针的实际间距,驱动下压气缸复位使解锁块在弹簧的弹力下复位以锁定当前位置,判断所述实际间距与目标间距的误差是否大于设定的误差阈值,若否,则完成探针的换型;若是,则进行误差过大的报警。
13、第二方面,本发明提供了一种基于激光传感器的探针变距系统,包括如下模块:
14、探针块定位模块,用于plc控制探针模组的伺服丝杆复位后,通过伺服电机带动激光传感器进行位移,以对探针模组上安装有探针的各探针块进行定位,实时记录各探针块的定位数据;
15、初始间距计算模块,用于plc基于所述定位数据计算各探针的初始间距;
16、探针块解锁模块,用于plc基于接收的换型指令,驱动下压气缸按压各探针块的解锁块,以解锁各探针块;
17、换型模块,用于plc基于所述换型指令以及初始间距,控制伺服丝杆进行转动,以自动调节各探针的间距。
18、进一步的,所述初始间距计算模块具体用于:
19、plc基于所述定位数据以及探针在探针块上的安装位置,自动计算各探针的初始间距以及初始位置,将所述初始间距以及初始位置写入安装于探针块的rfid芯片内。
20、进一步的,所述探针块解锁模块具体用于:
21、plc基于接收的携带目标间距的换型指令,驱动下压气缸按压各探针块的解锁块,以解锁各探针块。
22、进一步的,所述换型模块具体用于:
23、plc基于所述换型指令携带的目标间距以及初始间距计算移动距离,基于所述移动距离控制伺服丝杆进行顺时针转动或者逆时针转动,以自动调节各探针的间距,通过激光传感器测量各探针的实际间距,驱动下压气缸复位使解锁块在弹簧的弹力下复位以锁定当前位置,判断所述实际间距与目标间距的误差是否大于设定的误差阈值,若否,则完成探针的换型;若是,则进行误差过大的报警。
24、第三方面,本发明提供了一种基于激光传感器的探针变距设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现第一方面所述的方法。
25、第四方面,本发明提供了一种基于激光传感器的探针变距介质,其上存储有计算机程序,该程序被处理器执行时实现第一方面所述的方法。
26、本发明实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
27、通过plc控制探针模组的伺服丝杆复位后,通过伺服电机带动激光传感器进行位移,以对探针模组上安装有探针的各探针块进行定位,实时记录各探针块的定位数据,基于定位数据计算各探针的初始间距;接着plc基于换型指令驱动下压气缸按压各探针块的解锁块,以解锁各探针块,基于换型指令以及初始间距计算移动距离,基于移动距离控制伺服丝杆进行转动,以自动调节各探针的间距;即plc通过激光传感器对探针进行定位,并驱动伺服丝杆联动探针进行自动位移以进行变距,无需人工操作,进而极大的提升了探针换型效率,极大的提升了电池包检测效率。
28、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
技术特征:
1.一种基于激光传感器的探针变距方法,其特征在于:包括如下步骤:
2.如权利要求1所述的一种基于激光传感器的探针变距方法,其特征在于:所述步骤s2具体为:
3.如权利要求1所述的一种基于激光传感器的探针变距方法,其特征在于:所述步骤s3具体为:
4.如权利要求1所述的一种基于激光传感器的探针变距方法,其特征在于:所述步骤s4具体为:
5.一种基于激光传感器的探针变距系统,其特征在于:包括如下模块:
6.如权利要求5所述的一种基于激光传感器的探针变距系统,其特征在于:所述初始间距计算模块具体用于:
7.如权利要求5所述的一种基于激光传感器的探针变距系统,其特征在于:所述探针块解锁模块具体用于:
8.如权利要求5所述的一种基于激光传感器的探针变距系统,其特征在于:所述换型模块具体用于:
9.一种基于激光传感器的探针变距设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至4任一项所述的方法。
10.一种基于激光传感器的探针变距介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1至4任一项所述的方法。
技术总结
本发明提供了电池包检测技术领域的一种基于激光传感器的探针变距方法、系统、设备及介质,方法包括如下步骤:步骤S1、PLC控制探针模组的伺服丝杆复位后,通过伺服电机带动激光传感器进行位移,以对探针模组上安装有探针的各探针块进行定位,实时记录各探针块的定位数据;步骤S2、PLC基于所述定位数据计算各探针的初始间距;步骤S3、PLC基于接收的换型指令,驱动下压气缸按压各探针块的解锁块,以解锁各探针块;步骤S4、PLC基于所述换型指令以及初始间距,控制伺服丝杆进行转动,以自动调节各探针的间距。本发明的优点在于:极大的提升了探针换型效率。
技术研发人员:刘作斌,张敏汉,郑松涵,黄思强,郭金鸿
受保护的技术使用者:福建星云电子股份有限公司
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!