一种目标匹配方法、终端设备以及存储介质与流程
本申请涉及数据处理,特别是涉及一种目标匹配方法、终端设备以及存储介质。
背景技术:
1、雷达与视频信息融合技术通过综合来自雷达和图像传感器的感知数据,来得到更可靠、更准确或更精确的信息。融合后的数据能完善、准确地反映检测对象的特性,消除信息的片面性,提高传感器的可靠性。经过融合的多传感器信息降低了信息的冗余性,提高了信息的互补性。
2、以实现上述目的,需要融合雷达和图像传感器对环境中,同一目标在不同维度的观测数据,即需要解决雷达和图像传感器对检测目标进行匹配的问题。一种常见的处理方法是预先对雷达和图像进行联合标定,标定完成后,标定参数随即被确定,雷达目标和图像目标支架难度匹配不具备动态调节能力,对环境的适应能力也不高。
技术实现思路
1、本申请提供一种目标匹配方法、终端设备以及计算机存储介质。
2、本申请采用的一个技术方案是提供一种目标匹配方法,该目标匹配方法包括:
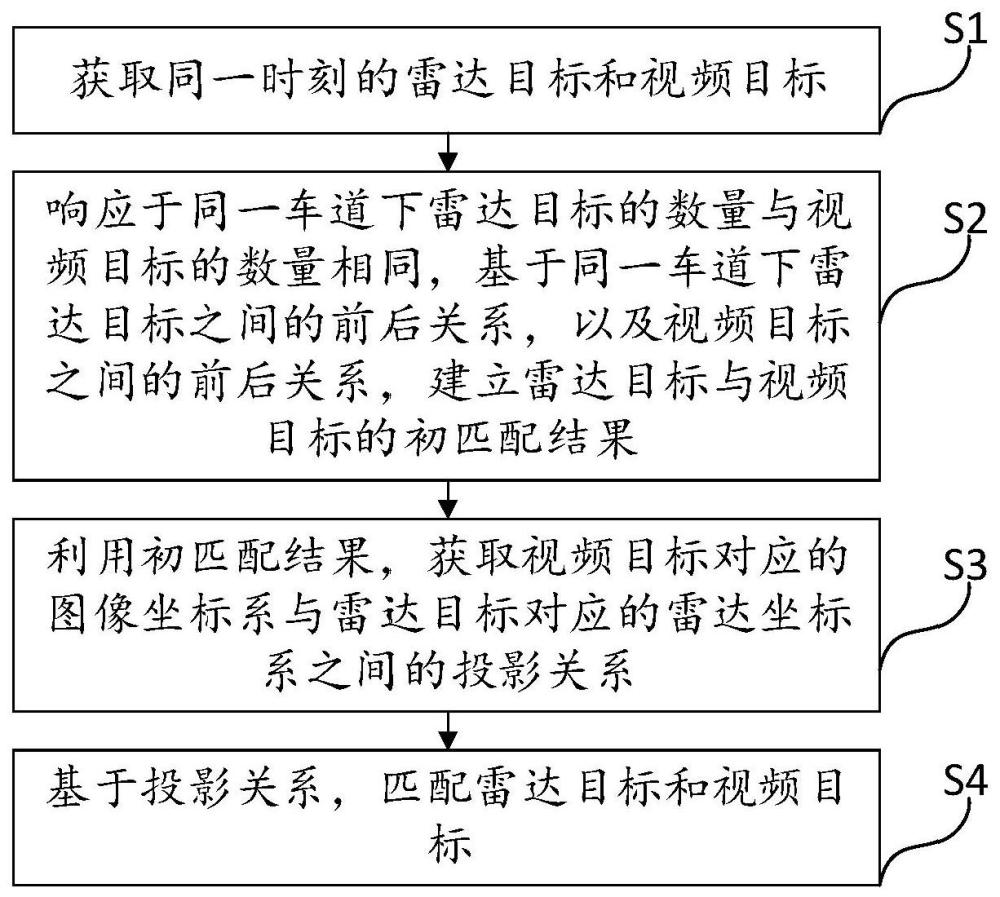
3、获取同一时刻的雷达目标和视频目标;
4、响应于同一车道下雷达目标的数量与视频目标的数量相同,基于同一车道下雷达目标之间的前后关系,以及视频目标之间的前后关系,建立雷达目标与视频目标的初匹配结果;
5、利用初匹配结果,获取视频目标对应的图像坐标系与雷达目标对应的雷达坐标系之间的投影关系;
6、基于投影关系,匹配雷达目标和视频目标。
7、可选地,初匹配结果包括:若干组坐标对,每一坐标对包括雷达目标在雷达坐标系中的第一坐标和雷达目标对应的视频目标在图像坐标系中的第二坐标;
8、利用初匹配结果,获取视频目标对应的图像坐标系与雷达目标对应的雷达坐标系之间的投影关系,包括:
9、将每一坐标对输入至前馈神经网络,得到对应的目标投影坐标;目标投影坐标为第二坐标在雷达坐标系的投影坐标;
10、利用每一目标投影坐标和每一坐标对的对应关系,确定出投影关系。
11、可选地,基于投影关系,匹配雷达目标和视频目标,包括:
12、基于投影关系,将视频目标从图像坐标系投影至雷达坐标系中,得到若干投影视频目标;
13、判断以投影视频目标为圆心的搜索区域内是否存在雷达目标;
14、响应于搜索区域内存在雷达目标,匹配雷达目标和投影视频目标对应的视频目标;
15、或,
16、响应于搜索区域内不存在雷达目标,确定雷达目标和视频目标匹配失败。
17、可选地,响应于搜索区域内存在雷达目标,匹配雷达目标和投影视频目标对应的视频目标,包括:
18、响应于搜索区域内存在一个雷达目标,匹配雷达目标和投影视频目标对应的视频目标;
19、或,
20、响应于搜索区域内存在多个雷达目标,计算每一雷达目标与投影视频目标之间的间距;
21、匹配间距最小的雷达目标与投影视频目标对应的视频目标。
22、可选地,获取同一时刻的雷达目标和视频目标,包括:
23、获取同一时间戳下的当前雷达帧和当前视频帧;
24、获取当前雷达帧中的雷达目标,以及当前视频帧中的视频目标。
25、可选地,获取同一时间戳下的当前雷达帧和当前视频帧的步骤之前,包括:
26、配置视频帧中的视频车道线区域,以及配置雷达帧中的雷达车道线区域;
27、获取雷达帧中的雷达目标,以及视频帧中的视频目标的步骤之后,包括:
28、基于雷达车道线区域,确定雷达目标所处的车道;
29、基于视频车道线区域,确定视频目标所处的车道。
30、可选地,基于雷达车道线区域,确定雷达目标所处的车道,包括:
31、利用雷达的标定参数,获取雷达坐标系与现实坐标系的映射关系;
32、基于雷达车道线区域,以及映射关系,确定雷达目标所处的车道。
33、可选地,利用初匹配结果,获取图像坐标系与雷达坐标系的投影关系的步骤之前,包括:
34、判断初匹配结果的匹配数量是否大于或等于阈值数量;
35、响应于匹配数量大于或等于阈值数量,确定执行利用初匹配结果,获取图像坐标系与雷达坐标系的投影关系的步骤。
36、本申请采用的另一个技术方案是提供一种终端设备,所述终端设备包括存储器以及与所述存储器连接的处理器;
37、其中,所述存储器用于存储程序数据,所述处理器用于执行所述程序数据以实现如上述的目标匹配方法。
38、本申请采用的另一个技术方案是提供一种计算机存储介质,所述计算机存储介质用于存储程序数据,所述程序数据在被计算机执行时,用以实现如上述的目标匹配方法。
39、本申请的有益效果是:获取同一时刻的雷达目标和视频目标;响应于同一车道下雷达目标的数量与视频目标的数量相同,基于同一车道下雷达目标之间的前后关系,以及视频目标之间的前后关系,建立雷达目标与视频目标的初匹配结果;利用初匹配结果,获取视频目标对应的图像坐标系与雷达目标对应的雷达坐标系之间的投影关系;基于投影关系,匹配雷达目标和视频目标。本申请的目标匹配方法,利用同一车道下雷达目标之间的前后关系,以及视频目标之间的前后关系,确定雷达目标和视频目标的初匹配关系,减少后续匹配过程中误匹配的发生。进一步地,利用初匹配关系,获取图像坐标系与雷达坐标系的映射关系,进一步滤除初匹配过程中的误匹配结果,进一步提升视频目标和雷达目标匹配的准确性。
技术特征:
1.一种目标匹配方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,
3.根据权利要求1所述的方法,其特征在于,
4.根据权利要求3所述的方法,其特征在于,
5.根据权利要求1所述的方法,其特征在于,
6.根据权利要求5所述的方法,其特征在于,
7.根据权利要求6所述的方法,其特征在于,
8.根据权利要求1所述的方法,其特征在于,
9.一种终端设备,其特征在于,所述终端设备包括处理器、与所述处理器连接的存储器,其中,
10.一种计算机可读存储介质,其特征在于,所述存储介质存储有程序指令,所述程序指令被执行时实现如权利要求1至8任一项所述的方法。
技术总结
本申请公开了一种目标匹配方法、终端设备以及存储介质,该目标匹配方法包括:获取同一时刻的雷达目标和视频目标;响应于同一车道下雷达目标的数量与视频目标的数量相同,基于同一车道下雷达目标之间的前后关系,以及视频目标之间的前后关系,建立雷达目标与视频目标的初匹配结果;利用初匹配结果,获取视频目标对应的图像坐标系与雷达目标对应的雷达坐标系之间的投影关系;基于投影关系,匹配雷达目标和视频目标。上述方案,利用雷达目标与视频目标的初匹配关系,确定图像坐标系与雷达坐标系之间的投影关系,基于投影关系匹配雷达目标和图像目标,进一步地提升目标匹配的准确性。
技术研发人员:高存璋,李冬冬,李乾坤,吴函,侯壮
受保护的技术使用者:浙江大华技术股份有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!