基于概率数据关联的红外主动干扰条件下目标跟踪方法及装置
本发明涉及红外主动干扰条件下目标跟踪技术,特别是一种基于概率数据关联的红外主动干扰条件下目标跟踪方法及装置。
背景技术:
1、随着红外制导武器的大量使用,对应的红外干扰技术也在不断地发展。红外制导和红外干扰在这种相互制约的关系下不断发展。
2、红外对抗基本上从两个方面着手。一方面是抑制目标发出的红外辐射,即称之为红外隐身,另一方面是产生红外主动干扰,利用飞机上发射一个较强的红外辐射源,造成一个假目标引诱导弹脱靶。
3、已有的抗红外主动干扰技术研究中,都是集中在信号处理层面及图像处理领域,从辐射强度、波段辐射、末端成像等方面进行对抗。且目前主流的抗红外主动干扰算法主要考虑目标和干扰分开后的情况。但在实际情况下,存在多种复杂红外主动干扰现象。由于红外主动干扰形式复杂,干扰时间,干扰频率以及目标运动状态有所差异,出现了各种红外干扰场景,例如红外主动干扰与目标重叠,与目标粘连成“一字型”、“人字型”等多种复杂情况。由于红外主动干扰与目标有着及其相似的辐射特性,在红外图像上无法通过灰度直接将两者区分开来,在目标和干扰粘连的情况下,量测恶化严重,所有量测都偏离真实目标,导致量测精确性下降,针对这类问题,需考虑红外主动干扰初期,目标和干扰粘连的复杂场景下的目标跟踪问题。
技术实现思路
1、为解决现有技术中存在的上述缺陷,本发明的目的在于提供一种针对红外主动干扰形式复杂,目标和干扰粘连形状各异,量测质量不确定性的基于概率数据关联的红外主动干扰条件下目标跟踪方法。
2、本发明是通过下述技术方案来实现的。
3、根据本发明的一个方面,提供了一种基于概率数据关联的红外主动干扰条件下目标跟踪方法,包括:
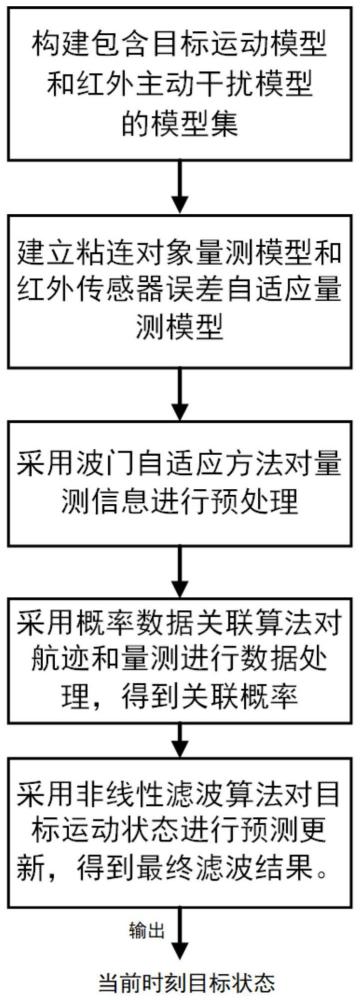
4、构建包括目标运动模型和红外主动干扰模型的模型集,根据所述模型集确定目标和红外主动干扰运动方式,模拟实际作战仿真场景;
5、基于仿真场景,对目标干扰粘连的复杂场景建立粘连对象量测模型和红外传感器误差自适应量测模型;
6、根据实际作战场景中弹目距离和视线张角,估计出粘连对象实际大小,采用波门自适应方法对粘连对象量测模型和红外传感器误差自适应量测模型进行量测信息进行预处理;
7、采用概率数据关联算法对在波门门限内包含目标和干扰在内的多个量测信息进行数据关联,得到量测和航迹相关联的概率;
8、采用非线性滤波算法处理目标运动模型以及粘连对象量测模型和红外传感器误差自适应量测模型进行目标运动状态预测,对目标运动状态预测进行更新;得到目标的状态估计和估计误差协方差,作为最终滤波结果。
9、优选的,对目标干扰粘连的复杂场景建立粘连对象量测模型,包括:
10、目标与干扰粘连或被干扰覆盖,形成粘连对象,根据目标和干扰信息量测的不确定性,将粘连对象边界框的质心、边界框四个顶点和四条边的中点作为粘连量测特征,增加量测个数,选出粘连量测中更接近真实目标量测的点,形成粘连对象量测模型。
11、本发明的一个方面,提供了一种所述方法的基于概率数据关联的红外主动干扰条件下目标跟踪装置,包括:
12、模拟模块,用于构建模型集,根据所述模型集确定目标和红外主动干扰运动方式,模拟实际作战仿真场景;
13、构建模块,用于对目标干扰粘连的复杂场景建立粘连对象量测模型和红外传感器误差自适应量测模型;
14、预处理模块,用于采用波门自适应方法对粘连对象量测模型和红外传感器误差自适应量测模型进行量测信息进行预处理;
15、关联模块,用于对包含目标和干扰信息在内的多个量测信息进行数据关联,得到量测和航迹相关联的概率;
16、状态预测更新模块,用于处理目标运动模型以及粘连对象量测模型和红外传感器误差自适应量测模型进行目标运动状态预测,对目标运动状态预测进行更新;得到目标的状态估计和估计误差协方差。
17、本发明由于采取以上技术方案,其具有以下有益效果:
18、1.本发明考虑目标和红外主动干扰粘连复杂场景,采用了粘连量测模型和误差自适应量测模型,尽可能获得接近真实目标的量测,解决了目标和红外主动干扰发生粘连时无准确目标量测和量测质量不确定性问题,提高了量测的精度。
19、2.本发明考虑粘连对象形状大小各异,量测质量实时变化的问题以及算法复杂性要求,根据估计出的粘连对象大小确定波门门限,采用波门自适应技术对接收到的多个量测信息进行数据预处理,剔除明显不可能来自于目标的量测,减小了后续算法计算量。
20、3.本发明考虑红外主动干扰下真实目标量测和干扰量测无法区分的情况,采用概率数据关联算法处理包含目标和干扰在内的多个量测信息,计算每个量测可能来源于真实目标的概率,解决了多个量测情境下目标和量测数据关联问题,提高了目标跟踪精度。
技术特征:
1.一种基于概率数据关联的红外主动干扰条件下目标跟踪方法,其特征在于,包括:
2.根据权利要求1所述的基于概率数据关联的红外主动干扰条件下目标跟踪方法,其特征在于,采用非机动目标匀速运动模型和三维匀转弯目标运动模型构建目标运动模型集;
3.根据权利要求1所述的基于概率数据关联的红外主动干扰条件下目标跟踪方法,其特征在于,构建红外主动干扰模型为:
4.根据权利要求1所述的基于概率数据关联的红外主动干扰条件下目标跟踪方法,其特征在于,对目标干扰粘连的复杂场景建立粘连对象量测模型,包括:
5.根据权利要求1所述的基于概率数据关联的红外主动干扰条件下目标跟踪方法,其特征在于,建立红外传感器误差自适应量测模型为:
6.根据权利要求1所述的基于概率数据关联的红外主动干扰条件下目标跟踪方法,其特征在于,采用波门自适应方法对粘连对象量测模型和红外传感器误差自适应量测模型进行量测信息进行预处理,采用如下公式:
7.根据权利要求1所述的基于概率数据关联的红外主动干扰条件下目标跟踪方法,其特征在于,量测航迹相关联的概率pij如下:
8.根据权利要求1所述的基于概率数据关联的红外主动干扰条件下目标跟踪方法,其特征在于,采用非线性滤波算法处理目标运动模型以及粘连对象量测模型和误差自适应量测模型进行目标运动状态预测,包括:
9.根据权利要求1所述的基于概率数据关联的红外主动干扰条件下目标跟踪方法,其特征在于,对目标运动状态预测进行更新,包括:
10.一种权利要求1-9任一项所述方法的基于概率数据关联的红外主动干扰条件下目标跟踪装置,其特征在于,包括:
技术总结
本发明公开了一种基于概率数据关联的红外主动干扰条件下目标跟踪方法及装置,构建模型集,根据模型集确定目标和红外主动干扰运动方式,模拟实际作战仿真场景;建立粘连对象量测模型和红外传感器误差自适应量测模型;估计出粘连对象实际大小,对粘连对象量测模型和红外传感器误差自适应量测模型进行量测信息进行预处理;对多个量测信息进行数据关联,得到量测和航迹相关联的概率;处理目标运动模型以及粘连对象量测模型和红外传感器误差自适应量测模型进行目标运动状态预测,对目标运动状态预测进行更新;得到目标的状态估计和估计误差协方差。本发明解决了目标和红外主动干扰发生粘连时无准确目标量测和量测质量不确定性问题,提高了量测的精度。
技术研发人员:兰剑,徐晗驰,郭晓晓,何家兴
受保护的技术使用者:西安交通大学
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!