一种平顺性实时测量方法及装置、电子设备、存储介质与流程
本技术涉及车辆参数测量,特别涉及一种平顺性实时测量方法及装置、电子设备、存储介质。
背景技术:
1、当前考虑到车辆的舒适性等问题,所以在对车辆进行测试时,通常需要测试车辆的平顺性,以便于基于测试得到的车辆的平顺性指标对车辆的悬架参数进行调节。
2、当前对于车辆的平顺性的测试,主要是记录车辆多个方向上的加速度时间历程,然后基于加速度时间历程,通过相应的频率加权函数的滤波网络得到车辆的加权加速度时间历程。然后对其进行频谱分析,得到功率谱密度函数,再对各向各频率加权获得最终的加权加速度均方根值,用于表征车辆的平顺性。最后可以将加权加速度均方根值与国际标准中的经验值进行对比,明确现在车辆的振动状态。
3、但是通过相应的频率加权函数的滤波网络得到车辆的加权加速度时间历程的过程较为繁琐,并且由于控制系统是离散控制系统,还需要对采集信号进行处理,转化为连续的数据,且频谱分析需要大量算力设备实现,各方向数据也需要相应设备采集,所以需要部署大量设备,所以导致现有的方式过于繁琐。
技术实现思路
1、基于上述现有技术的不足,本技术提供了一种平顺性实时测量方法及装置、电子设备、存储介质,以解决现有技术不够便捷的问题。
2、为了实现上述目的,本技术提供了以下技术方案:
3、本技术第一方面提供了一种平顺性实时测量方法,包括:
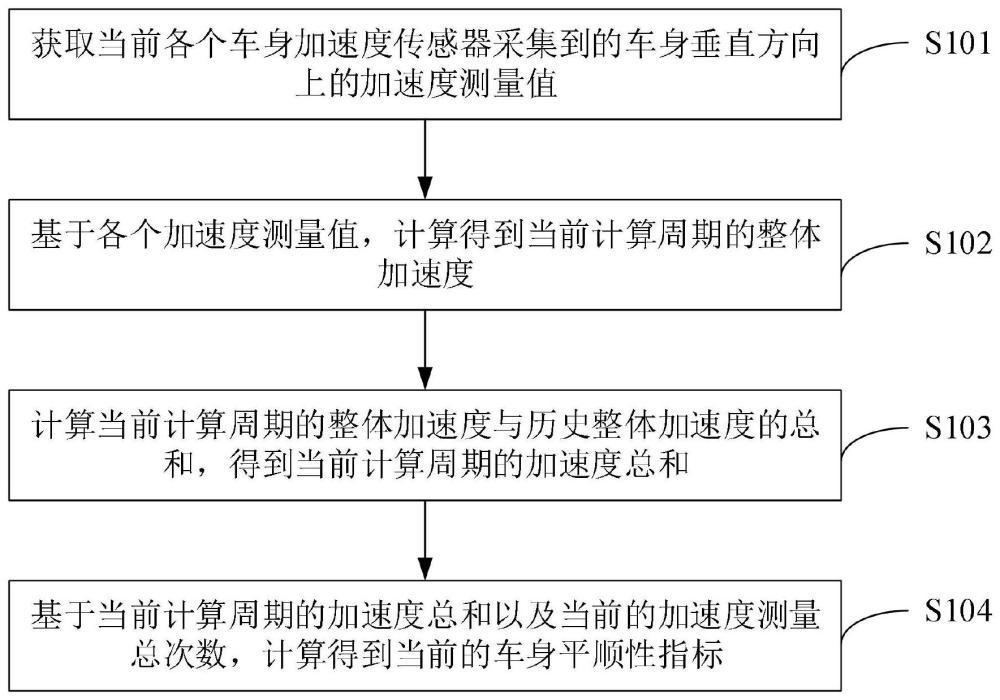
4、获取当前各个车身加速度传感器采集到的车身垂直方向上的加速度测量值;
5、基于各个所述加速度测量值,计算得到当前计算周期的整体加速度;其中,所述整体加速度指代车身整体在垂直方向上的加速度;
6、计算当前计算周期的所述整体加速度与历史整体加速度的总和,得到当前计算周期的加速度总和;其中,所述历史整体加速度指代当前计算周期前的全部计算周期的所述整体加速度;
7、基于当前计算周期的加速度总和以及当前的加速度测量总次数,计算得到当前的车身平顺性指标。
8、可选地,在上述的平顺性实时测量方法中,所述基于各个所述加速度测量值,计算得到当前计算周期的所述整体加速度,包括:
9、分别对当前各个所述车身加速度传感器采集到的所述加速度测量值进行均值滤波,得到各个所述车身加速度传感器对应的当前零点偏移值;
10、分别将当前各个所述车身加速度传感器采集到的所述加速度测量值,减去各个所述车身加速度传感器对应的当前零点偏移值,得到多个加速度实际值;
11、对各个所述加速度实际值进行整合,得到当前计算周期的所述整体加速度。
12、可选地,在上述的平顺性实时测量方法中,所述计算当前计算周期的所述整体加速度与历史整体加速度的总和,得到当前计算周期的加速度总和,包括:
13、利用上一个计算周期的车身平顺性指标以及上一个计算周期的所述加速度测量总次数,计算得到上一个计算周期的加速度总和;
14、将上一个计算周期的加速度总和与当前计算周期的所述整体加速度相加,得到当前计算周期的加速度总和。
15、可选地,在上述的平顺性实时测量方法中,所述利用上一个计算周期的车身平顺性指标以及上一个计算周期的所述加速度测量总次数,计算得到上一个计算周期的加速度总和,包括:
16、将上一个计算周期的所述加速度测量总次数乘以上一个计算周期的所述车身平顺性指标的平方,得到上一个计算周期的加速度总和。
17、可选地,在上述的平顺性实时测量方法中,所述基于当前计算周期的加速度总和以及当前的加速度测量总次数,计算得到当前的车身平顺性指标,包括:
18、对当前计算周期的加速度总和与当前的所述加速度测量总次数的商进行开方,得到当前的所述车身平顺性指标。
19、可选地,在上述的平顺性实时测量方法中,所述计算当前计算周期的所述整体加速度与历史整体加速度的总和,得到当前计算周期的加速度总和之前,还包括:
20、读取当前的平顺性指标标志位;
21、若当前的所述平顺性指标标志位为第一标识,则保持所述车身平顺性指标不变;
22、若当前的所述平顺性指标标志位为第二标识,则判断在上一个计算周期时所述平顺性指标标志位是否为第一标识;
23、若判断出在上一个计算周期时所述平顺性指标标志位为第一标识,则将所述车身平顺性指标清零,并将所述加速度测量总次数重置为1。
24、可选地,在上述的平顺性实时测量方法中,所述基于当前计算周期的加速度总和以及当前的加速度测量总次数,计算得到当前的车身平顺性指标之后,还包括:
25、判断当前时刻是否处于预设的观测时间范围内;
26、若判断出当前时刻处于预设的观测时间范围内,则返回执行所述获取当前各个车身加速度传感器采集到的车身垂直方向上的加速度测量值;
27、若判断出不处于预设的观测时间范围内,则将当前的所述车身平顺性指标作为本次测试结果输出。
28、本技术第二方面提供了一种平顺性实时测量装置,包括:
29、获取单元,用于获取当前各个车身加速度传感器采集到的车身垂直方向上的加速度测量值;
30、第一计算单元,用于基于各个所述加速度测量值,计算得到当前计算周期的整体加速度;其中,所述整体加速度指代车身整体在垂直方向上的加速度;
31、第二计算单元,用于计算当前计算周期的所述整体加速度与历史整体加速度的总和,得到当前计算周期的加速度总和;其中,所述历史整体加速度指代当前计算周期前的全部计算周期的所述整体加速度;
32、第三计算单元,用于基于当前计算周期的加速度总和以及当前的加速度测量总次数,计算得到当前的车身平顺性指标。
33、可选地,在上述的平顺性实时测量装置中,所述第一计算单元,包括:
34、滤波单元,用于分别对当前各个所述车身加速度传感器采集到的所述加速度测量值进行均值滤波,得到各个所述车身加速度传感器对应的当前零点偏移值;
35、实际值计算单元,用于分别将当前各个所述车身加速度传感器采集到的所述加速度测量值,减去各个所述车身加速度传感器对应的当前零点偏移值,得到多个加速度实际值;
36、整合单元,用于对各个所述加速度实际值进行整合,得到当前计算周期的所述整体加速度。
37、可选地,在上述的平顺性实时测量装置中,所述第二计算单元,包括:
38、历史总和计算单元,用于利用上一个计算周期的所述车身平顺性指标以及上一个计算周期的所述加速度测量总次数,计算得到上一个计算周期的加速度总和;
39、当前总和计算单元,用于将上一个计算周期的加速度总和与当前计算周期的所述整体加速度相加,得到当前计算周期的加速度总和。
40、可选地,在上述的平顺性实时测量装置中,所述历史总和计算单元,包括:
41、历史总和计算子单元,用于将上一个计算周期的所述加速度测量总次数乘以上一个计算周期的所述车身平顺性指标的平方,得到上一个计算周期的加速度总和。
42、可选地,在上述的平顺性实时测量装置中,所述第三计算单元,包括:
43、指标计算单元,用于对当前计算周期的加速度总和与当前的所述加速度测量总次数的商进行开方,得到当前的所述车身平顺性指标。
44、可选地,在上述的平顺性实时测量装置中,还包括:
45、读取单元,用于读取当前的平顺性指标标志位;
46、保持单元,用于在当前的所述平顺性指标标志位为第一标识时,保持所述车身平顺性指标不变;
47、第一判断单元,用于在当前的所述平顺性指标标志位为第二标识时,判断在上一个计算周期时所述平顺性指标标志位是否为第一标识;
48、重置单元,用于在判断出在上一个计算周期时所述平顺性指标标志位为第一标识时,将所述车身平顺性指标清零,并将所述加速度测量总次数重置为1。
49、可选地,在上述的平顺性实时测量装置中,还包括:
50、第二判断单元,用于判断当前时刻是否处于预设的观测时间范围内;
51、返回单元,用于在判断出当前时刻处于预设的观测时间范围内时,返回所述获取单元;
52、输出单元,用于在判断出不处于预设的观测时间范围内时,将当前的所述车身平顺性指标作为本次测试结果输出。
53、本技术第三方面提供了一种电子设备,包括:
54、存储器和处理器;
55、其中,所述存储器用于存储程序;
56、所述处理器用于执行所述程序,所述程序被执行时,具体用于实现如上述任意一项所述的平顺性实时测量方法。
57、本技术第四方面提供了一种计算机存储介质,用于存储计算机程序,所述计算机程序被执行时,用于实现如上述任意一项所述的平顺性实时测量方法。
58、本技术实施例提供了一种平顺性的实时测量方法,获取当前各个车身加速度传感器采集到的车身垂直方向上的加速度测量值,即通过垂向单轴传感器仅采集垂直方向上的加速度,所以仅需要设置一类传感器不需要在设置采集不同方向的传感器,建行测量的过程。接着基于各个所述加速度测量值,计算得到当前计算周期的整体加速度。其中,所述整体加速度指代车身整体在垂直方向上的加速度。然后计算当前计算周期的所述整体加速度与历史整体加速度的总和,得到当前计算周期的加速度总和。其中,历史整体加速度指代当前计算周期前的全部计算周期的所述整体加速度。最后基于当前计算周期的加速度总和以及当前的加速度测量总次数,计算得到当前的车身平顺性指标。从而采用离散的数据实现对车身平顺性指标的计算,不需要进行频率加权函数的滤波和频谱分析,进而使得对于车身平顺性指标的测量更加的便捷。
- 还没有人留言评论。精彩留言会获得点赞!