基于图像处理的导航方法、装置、系统及存储介质
本发明涉及导航,尤其涉及一种基于图像处理的导航方法、装置、系统及存储介质。
背景技术:
1、视力障碍者在外出时,通常是使用盲杖等器具对周围环境进行识别,但这种方式无法及时及准确的对外部环境及障碍物信息进行判断,使视力障碍者在面对可能的安全风险时无法紧急的进行回避,存在较大的安全隐患。现有技术中,能够帮助视力障碍者出行的器具只有简单的盲杖或导盲犬,但这些无法满足视力障碍者的日常出行安全要求。
技术实现思路
1、为了解决帮助视力障碍者对周围环境进行及时判断及提示,提高视力障碍者的出行安全性这一问题,本发明提供一种基于图像处理的导航方法、装置、系统及存储介质。
2、根据第一方面,本发明提供一种基于图像处理的导航方法,所述导航方法应用于导航设备,所述导航设备包括主控设备以及至少一个用于互动的提示装置,所述主控设备与每个所述提示装置通信连接,所述主控设备包括两个图像采集装置、两个驱动装置以及至少一个距离传感器,所述距离传感器设于两个图像采集装置之间,两个所述驱动装置分别用于驱动两个所述图像采集装置进行转动,转动方向与任一图像采集装置的采集方向垂直,并且两个图像采集装置的摆动方向始终相反;所述导航方法包括以下步骤:
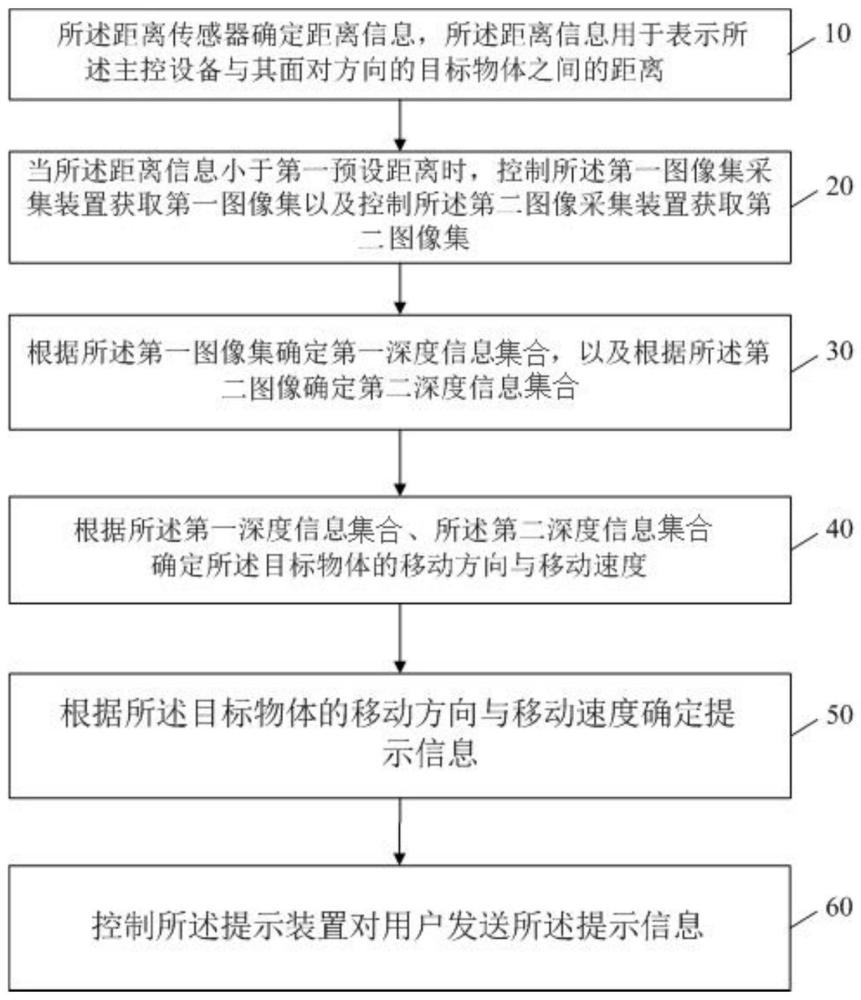
3、所述距离传感器确定第一距离,所述第一距离用于表示所述主控设备与其面对方向的目标物体之间的距离;
4、当所述第一距离小于第一预设距离时,所述第一图像集采集装置获取第一图像集以及所述第二图像采集装置获取第二图像集;
5、根据所述第一图像集确定第一深度信息集合,以及根据所述第二图像集确定第二深度信息集合,所述第一深度信息集合包括多个第一深度信息,所述第二深度信息集合包括多个第二深度信息;
6、根据所述第一深度信息集合与所述第二深度信息集合确定所述目标物体的移动方向与移动速度;
7、根据所述目标物体的移动方向与移动速度生成提示信息;
8、所述提示装置将所述提示信息发送至用户。
9、根据第二方面,本发明提供一种基于图像处理的导航装置,所述导航装置应用于导航设备,所述导航设备包括主控设备以及至少一个用于互动的提示装置,所述主控设备与每个所述提示装置通信连接,所述主控设备包括两个图像采集装置、两个驱动装置以及至少一个距离传感器,所述距离传感器设于两个图像采集装置之间,两个所述驱动装置分别用于驱动两个所述图像采集装置进行转动,转动方向与任一图像采集装置的采集方向垂直,并且两个图像采集装置的摆动方向始终相反;所述导航装置包括:
10、获取单元,用于通过所述距离传感器确定第一距离,所述第一距离用于表示所述主控设备与其面对方向的目标物体之间的距离;
11、采集装置控制单元,用于当所述第一距离小于第一预设距离时,控制所述第一图像集采集装置获取第一图像集以及控制所述第二图像采集装置获取第二图像集;
12、深度信息确定单元,用于根据所述第一图像集确定第一深度信息集合,以及根据所述第二图像集确定第二深度信息集合,所述第一深度信息集合包括多个第一深度信息,所述第二深度信息集合包括多个第二深度信息;
13、移动确定单元,用于根据所述第一深度信息集合与所述第二深度信息集合确定所述目标物体的移动方向与移动速度;
14、提示信息生成单元,用于根据所述目标物体的移动方向与移动速度生成提示信息;
15、提示单元,用于控制所述提示装置将所述提示信息发送至用户。
16、根据第三方面,本发明提供一种导航系统,包括处理器、存储器、收发器,以及一个或多个程序,所述一个或多个程序被存储在所述存储器中,并且被配置由所述处理器执行,所述程序包括用于执行如权利要求1-7任一项所述的方法中的步骤的指令。
17、根据第四方面,本发明提供一种计算机可读存储介质,存储用于电子数据交换的计算机程序,其中,所述计算机程序使得计算机执行如权利要求1-7任一项所述的方法。
18、本发明的有益效果是:通过第一图像采集装置与第二图像采集装置实时获取视力障碍者前方的图像,并根据采集的图像判断是否存在目标物体以及目标物体的移动方向与移动速度,能够及时的根据判断向视力障碍者发出提示,从而避免视力障碍者在没有帮助的情况下行动困难及容易出现风险的问题。
技术特征:
1.一种基于图像处理的导航方法,其特征在于,所述导航方法应用于导航设备,所述导航设备包括主控设备以及至少一个用于互动的提示装置,所述主控设备与每个所述提示装置通信连接,所述主控设备包括两个图像采集装置、两个驱动装置以及至少一个距离传感器,所述距离传感器设于两个图像采集装置之间,两个所述驱动装置分别用于驱动两个所述图像采集装置进行转动,转动方向与任一图像采集装置的采集方向垂直,并且两个图像采集装置的摆动方向始终相反;所述导航方法包括以下步骤:
2.根据权利要求1所述的基于图像处理的导航方法,其特征在于,确定第一深度信息集合以及第二深度信息集合的过程包括以下步骤:
3.根据权利要求2所述的基于图像处理的导航方法,其特征在于,计算第一深度信息以及第二深度信息的过程包括以下步骤:
4.根据权利要求2所述的基于图像处理的导航方法,其特征在于,计算第一深度信息以及第二深度信息的过程包括以下步骤:
5.根据权利要求1所述的基于图像处理的导航方法,其特征在于,确定所述目标物体的移动方向与移动速度的过程包括以下步骤:
6.根据权利要求5所述的基于图像处理的导航方法,其特征在于,确定第一目标区块以及第二目标区块的过程包括以下步骤:
7.根据权利要求5所述的基于图像处理的导航方法,其特征在于,确定所述目标物体的移动方向与移动速度的过程包括以下步骤:
8.一种基于图像处理的导航装置,其特征在于,所述导航装置应用于导航设备,所述导航设备包括主控设备以及至少一个用于互动的提示装置,所述主控设备与每个所述提示装置通信连接,所述主控设备包括两个图像采集装置、两个驱动装置以及至少一个距离传感器,所述距离传感器设于两个图像采集装置之间,两个所述驱动装置分别用于驱动两个所述图像采集装置进行转动,转动方向与任一图像采集装置的采集方向垂直,并且两个图像采集装置的摆动方向始终相反;所述导航装置包括:
9.一种导航系统,其特征在于,包括处理器、存储器、收发器,以及一个或多个程序,所述一个或多个程序被存储在所述存储器中,并且被配置由所述处理器执行,所述程序包括用于执行如权利要求1-7任一项所述的方法中的步骤的指令。
10.一种计算机可读存储介质,其特征在于,存储用于电子数据交换的计算机程序,其中,所述计算机程序使得计算机执行如权利要求1-7任一项所述的方法。
技术总结
本发明公开了一种基于图像处理的导航方法、装置、系统及存储介质,该导航方法应用于导航设备,导航设备包括主控设备以及至少一个用于互动的提示装置,主控设备包括两个图像采集装置、两个驱动装置及至少一个距离传感器,距离传感器设于两个图像采集装置之间,两个驱动装置分别用于驱动两个图像采集装置进行转动,转动方向与任一图像采集装置的采集方向垂直,两个图像采集装置的摆动方向始终相反,本发明通过两个图像采集装置实时获取视力障碍者前方的图像,并根据采集的图像判断是否存在目标物体以及目标物体的移动方向与移动速度,能够及时的根据判断向视力障碍者发出提示,从而避免视力障碍者在没有帮助的情况下行动困难及容易出现风险的问题。
技术研发人员:赵春蕾,朱明,郝志成,鲁剑锋,姜鑫,高云龙,吴凡路
受保护的技术使用者:中国科学院长春光学精密机械与物理研究所
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!