一种联合载波相位和到达时间的定位方法
本发明属于无线定位领域,涉及一种联合载波相位和到达时间(time ofarrival,toa)的定位方法。
背景技术:
1、基于位置的服务为日常生活提供了极大的便利,如共享单车、智能工厂、护理服务等等。因此准确地获取终端位置信息的需求变得日益强烈。在rel-17(release 17)中明确了5g增强定位服务的性能需求,工业互联网终端定位精度要求90%的终端水平定位精度小于0.2m,垂直定位精度小于1m,对于这样高性能的定位需求,传统定位方法的精度有局限性。rel-18(release 18)定位研究项目中提出在无线蜂窝网络中引入载波相位定位技术以提高定位精度。载波相位定位技术是指利用测量的载波相位及估计的整周模糊度进行定位。该技术在全球导航卫星系统中已经被广泛地应用,但室内和建筑物密集的地带,终端难以接收卫星信号。而无线蜂窝网络覆盖广、不受电离层、对流层时延等气候因素的干扰,可对参考信号进行更加灵活的配置。因此将载波相位定位技术应用于无线蜂窝网络中有可能取得更高的定位精度。
2、在无线蜂窝网络定位中,参考信号的配置和选取对定位性能有重要的影响。5g标准中规定的定位参考信号(positioning reference signal,prs)的调制方式是正交频分复用调制,这种调制方式能够有效地抵抗多径干扰和频率选择性衰落,因此prs被广泛应用于具有定位功能和导航功能的无线通信系统。同时,prs资源可以灵活配置以适应不同的通信场景和需求。prs作为导频可以用来进行信道估计,在复杂的无线信道环境下,估计信道存在估计误差,原子范数算法是一种用于稀疏信号恢复的优化算法,该算法可以重构估计信道减少信道估计误差。目前基于载波相位的无线蜂窝网络定位中,残差载波相位通过(phase-locked loop,pll)测量或者通过估计信道获取。估计信道一般可以拆分为包含子载波的矩阵和包含载波的矩阵,目前一些文献采用旋转不变技术(estimation of signalparameters via rotational invariance techniques,esprit)或者匹配追踪(matchingpursuit,mp)算法确定载波相位。
3、但是现有的载波相位的确定方法在估计信道时仍存在较大的估计误差,而载波相位定位技术对于精度的需求又比较高,现有的载波相位定位技术的精度问题有待提高。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种联合载波相位和到达时间的定位方法。本发明将原子范数算法应用于载波相位定位技术中,可进一步提高定位精度。
2、为达到上述目的,本发明提供如下技术方案:
3、一种联合载波相位和到达时间的定位方法,该定位方法包括以下步骤:
4、步骤s1、在矩形空间内构建系统模型,其包括终端、m个接收发送节点(transmit-receive point,trp)和定位服务器;m个收发节点trp发送下行定位参考信号(downlinkpositioning reference signal,dl-prs),经过多径传输,终端根据接收到的各trp发送信号与本地定位参考信号(local positioning reference signal,local-prs)进行信道估计;
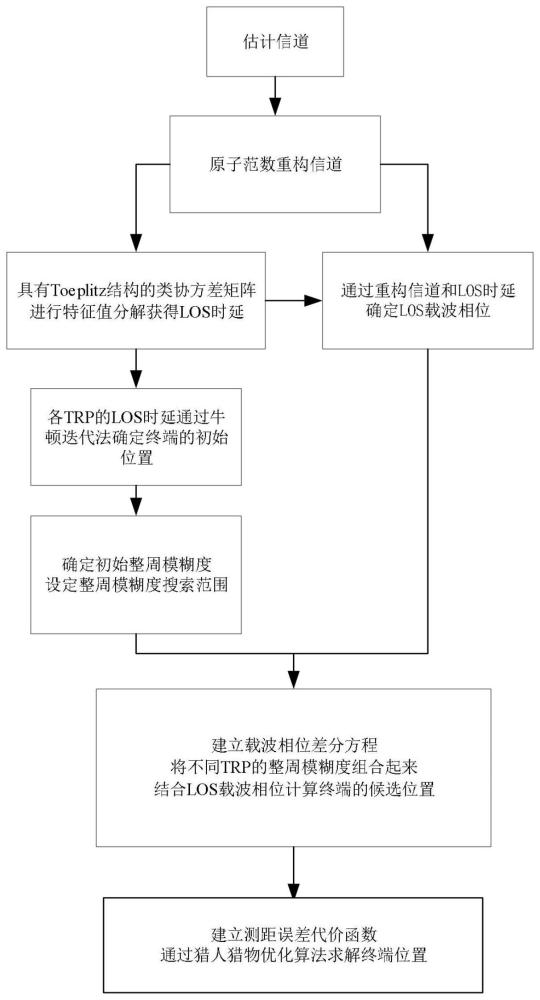
5、步骤s2、终端测量视距路径(line of sight,los)的时延和载波相位;具体包括:
6、s21:终端采用原子范数对估计信道进行重构,得到具有toeplitz结构的类协方差矩阵;
7、s22:终端对所述协方差矩阵进行特征值分解,通过特征矢量获得视距路径los时延;
8、s23:终端对包含los时延的子载波矢量和经过原子范数重构的矢量化信道采用最小二乘法进行处理,以确定los载波相位;
9、步骤s3、终端将各收发节点trp的los时延和los载波相位上传至定位服务器,定位服务器进行终端位置解算;具体包括:
10、s31:定位服务器根据m个trp与终端的位置关系以及测量的los时延,采用牛顿迭代法估计终端的初始位置;
11、s32:定位服务器通过终端的初始位置和每个tpr的位置进而获得初始整周模糊度,并以初始整周模糊度为中心设定整周模糊度搜索范围;
12、s33:建立载波相位差分方程,将不同trp的整周模糊度组合起,结合los载波相位计算终端的候选位置,建立测距误差代价函数,进而通过猎人猎物优化算法求解终端位置。
13、进一步地,在步骤s1中,所述系统模型进行如下配置:
14、第m个trp的第n个ofdm符号对应的基带prs信号为:
15、
16、其中sm,n(t)表示第m个trp的第n个ofdm符号的t时刻的基带prs信号;k表示prs时频资源网格中子载波的总数,k表示子载波的索引值,表示第零项至第k-1项的和;n表示ofdm符号的索引值,cm(k,n)表示第m个trp的第n个ofdm符号的第k个子载波上调制的prs符号;j表示虚数,π表示圆周率,t表示连续时间点,t表示采样间隔;kcp-ofdm=k+kcp,kcp表示循环前缀的子载波个数,kcp-ofdm表示包含循环前缀的子载波总数;u(t)表示门函数,其中,
17、
18、复ofdm基带信号上变频后,发送信号表示为:
19、
20、其中re{·}表示取复数的实部,fc表示调制的载波频率;
21、发送信号经过多径信道,信道脉冲响应为:
22、
23、其中表示第m个trp的第n个ofdm符号的信道冲激响应;l表示从trp到终端传输过程中存在的路径个数,第1条对应视距路径,剩余的l-1条代表由反射散射或其他因素造成的其他路径,l表示第l条路径;表示第m个trp的第n个ofdm的第l条路径的复路径增益,τm,l,n表示第m个trp的第n个ofdm符号的第l条路径的传输时延;δ(·)表示狄拉克δ函数;
24、在τm,l,n≈τm,l,的情况下,终端的接收信号为:
25、
26、其中表示终端接收到的第m个trp的第n个ofdm符号内的prs信号,*表示卷积,wn(t):表示加性高斯白噪声,~表示分布为,cn表示服从高斯分布,表示噪声的方差;
27、终端的接收信号经过下变频后,与local-prs定时同步,移除循环前缀,设理想状态下初始载波相位偏移为0,基带信号rn(t)表示为:
28、
29、其中ωn(t)表示终端的基带信号中的噪声分量,rn(t)的有效信息部分:
30、
31、限定max{τm,l}<kcpt,max{·}表示取最大值;
32、对基带信号进行傅里叶变换,接收端的基带信号频域表示为:
33、
34、其中rm,n(k)表示第m个trp的第n个ofdm符号的第k个子载波的接收符号,代表子载波频率间隔,ω'm,n(k)代表第m个trp的第n个ofdm符号的第k个子载波的符号中包含的噪声;
35、根据终端已知的prs资源指示从ofdm解调的资源网格rn(k)中提取不同trp的接收符号;将rm,n(k)表示为rm(k,n),将ω'm,n(k)表示为ω'm(k,n),则信道频率响应为:
36、
37、其中表示信道估计误差,服从复高斯分布;表示信道估计误差的方差,^表示估计;
38、在一个时隙内,下行链路prs资源中,终端的参考信号序列q(g)经过物理信号或者物理信道的幅度因子βprs放缩并且映射到(k,n)资源元素上:
39、cm(k,n)=βprsq(g)
40、g=0,1,…,g-1
41、
42、n=0,1,…,n-1
43、其中g表示prs信号的总调制符号数,g∈{0,…,g-1}表示调制符号的索引值,mod表示取余;表示prs信号的梳状因子配置方式,comb表示梳状因子,其代表每个trp在同一个ofdm符号中相邻资源元素间隔相等,间隔comb个子载波;表示第n个ofdm符号相比起始ofdm符号的频率偏移量,表示第m个trp的第0个ofdm符号的资源元素相对point a的偏移量,其中k=0表示定位频率层中point a的位置,point a的位置在配置下行链路prs资源时由高层参数dl-prs-pointa给定;
44、基于此,第m个trp的第n个ofdm符号中的k个子载波的估计信道重新表示为:
45、
46、其中表示g个映射有prs符号的子载波;上标t表示矩阵的转置;
47、n个ofdm符号的估计信道表示为:
48、
49、其中表示第m个trp的n个ofdm符号的g个子载波;hm的每个元素表示为:
50、
51、其中表示第m个trp的第n个ofdm符号的第个子载波对应的信道估计误差。
52、进一步地,在步骤s21中,包括如下步骤:
53、1)定义第m个trp的第n个ofdm符号的原子为:
54、
55、其中表示在第m个trp与终端之间第n个ofdm符号估计的第r条路径的时延,表示第m个trp与终端之间的第n个ofdm符号估计的第r条路径的复增益的相位;
56、2)第m个trp的第n个ofdm符号的原子集a表示为:
57、
58、3)第m个trp与终端之间的第n个ofdm符号的重构信道用原子集表示为:
59、
60、其中表示第m个trp与终端之间的第n个ofdm符号估计的第r条路径的复增益的幅度;|·|表示取绝对值;
61、4)定义为第m个trp与终端之间的第n个ofdm符号的估计路径总数,采用原子范数最小化表示为:
62、
63、其中表示原子集a中个原子的线性组合,||·||a,0表示原子范数,inf表示最小化;
64、5)对采用凸松弛,转化为:
65、
66、其中表示第m个trp与终端之间的第n个ofdm符号的估计路径的复增益的幅度总和,conv(a)表示原子集a的凸包;
67、6)定义变量构造如下矩阵:
68、
69、其中表示第m个trp与终端之间的第n个ofdm符号的toeplitz矩阵,u代表toeplitz矩阵的第一列;上标h表示矩阵进行复共轭转置;在满足上述约束条件时,的半定规划形式表示为:
70、
71、其中约束矩阵可以拆分为tr(·)表示矩阵求迹;
72、7)终端重构估计信道表示为如下优化问题:
73、
74、其中argmin表示函数最小化时变量对应的取值;μ表示正则化参数,平衡拟合误差和矢量稀疏性,表示第n个ofdm符号的重构信道,||·||a表示原子范数;表示经原子范数重构的n个ofdm符号组成的信道;表示求矩阵的f-范数的平方值;tr(·)表示矩阵求迹;表示第m个trp与终端之间的第n个ofdm符号的类协方差矩阵,其为toeplitz矩阵,u代表toeplitz矩阵的第一列;表示第m个trp与终端之间的第n个ofdm符号的估计路径的复增益的幅度总和;s.t表示subject to英文的缩写;上标h表示矩阵的复共轭转置。
75、进一步地,在步骤s22,具体包括如下步骤:
76、1)采用凸优化工具cvx对上述凸优化问题求解,解得和第m个trp与终端之间的第n个ofdm符号的toeplitz矩阵表示为:
77、
78、2)联合n个ofdm符号的toeplitz矩阵τm(u)进行特征值分解:
79、
80、其中,
81、
82、表示第m个trp与终端之间的复增益的幅度;wm表示τm(u)的特征矢量,其中diag(·)表示一个对角矩阵,每个对角线元素是相应的元素·;表示估计的第i条路径的时延;
83、3)将从大到小排列,取前g-1行wm和后g-1行wm分别构成矢量wm,1和wm,2:
84、wm,1=em,1wm
85、wm,2=em,2wm
86、其中em,1=[i 0],em,2=[0 i],为单位矩阵;
87、由wm,1=em,1wm和wm,2=em,2wm获得:
88、wm,2=wm,1ωm
89、其中表示为:
90、
91、4)包含时延信息的矩阵ωm通过最小二乘法表示为:
92、((wm,1)hwm,1)-1(wm,1)hwm,2=ωm
93、其中上标-1表示求逆;
94、5)结合prs梳妆因子的配置方式同一个trp相邻子载波间隔通过下式计算时延:
95、
96、其中表示第m个trp与终端之间估计的r条路径的时延,其中也记为表示los路径的时延;arctan表示反正切函数;
97、6)子载波波长表示为:
98、
99、其中λscs表示prs信号的子载波波长。
100、进一步地,在步骤s23中,包括如下过程:
101、第m个trp经过原子范数重构的信道表示为:
102、
103、其中设重构信道与理想信道之间的估计误差为表示为:
104、
105、对进行矢量化,即其中vec(·)表示将矩阵转化为矢量,将hm,theory的子载波和载波项进行拆分,表示为:
106、
107、其中,代表对矩阵进行矢量化,从g×n维矩阵转化为g·n×1维矢量:
108、
109、
110、将toeplitz矩阵估计的代入中,当时,c中包含los载波相位项表示为:
111、
112、los载波相位表示为:
113、
114、进一步地,在步骤s31中,终端与trp之间的几何位置关系为:
115、
116、其中(x,y,z)表示终端的真实位置,(xm,ym,zm)表示第m个trp的三维坐标,em表示测距误差,c表示光速,通过牛顿迭代法可以估计出终端的初始位置(xf,yf,zf)。
117、进一步地,在步骤s32中,结合各trp的位置和终端的初始位置来估算初始整周模糊度
118、
119、其中代表载波的波长;[·]表示取整。
120、进一步地,在步骤s33中,第m个trp与终端之间的距离表示为:
121、
122、其中nm表示第m个trp到终端的真实整周模糊度,φm表示第m个trp到终端的真实残差载波相位,残差载波相位即为载波相位;
123、结合测量的初始整周模糊度和los载波相位,载波相位方程表示为:
124、
125、其中表示第m个trp到终端的los载波相位;表示第m个trp到终端的初始整周模糊度;表示采用载波相位定位时测距的平方的误差;令代入化简为:
126、
127、多个trp之间的载波相位差表示为:
128、
129、
130、多个基站之间的载波相位差分方程为:
131、
132、上面的等式化简为:
133、ap=x
134、其中,
135、
136、
137、通过最小二乘法求解p:
138、p=(ata)-1atxf
139、其中
140、toa的测量偏差为:
141、
142、其中δm,los表示toa的估计误差,定义代表整周模糊度的搜索偏差范围,各trp的初始整周模糊度取值范围表示为:
143、
144、其中代表不同tpr的整周模糊度取值范围,m个trp的整周模糊度取值范围为:
145、o=[o1 … om … om]
146、其中不同tpr的整周模糊度进行组合后代入xf中,总共有om次组合方式,然后再代入p=(ata)-1atxf中求解,p存在om个候选解;
147、造代价函数:
148、
149、其中(xls,yls,zls)表示不同整周模糊度组合方式下,用最小二乘法计算的终端位置,即p的om个候选解,表示第m个tpr到终端选取的整周模糊度,代表所有tpr在不同整周模糊度组合后计算出的位置与每个tpr之间的距离以及每个tpr与终端以载波相位和整周模糊度构成的测距之间的总误差函数;
150、采用猎人猎物优化算法,将总误差函数作为目标函数,种群设定为各trp的整周模糊度取值,以o为搜索空间,通过不断迭代使总误差函数取值最小,确定终端与各trp之间的最优整周模糊度组合方式,相对应的p为终端的最终位置。
151、本发明的有益效果在于:
152、本发明采用原子范数对估计信道进行重构,得到一具有toeplitz结构的类协方差矩阵;并对该矩阵进行特征值分解,以获得los时延;并对包含los时延的子载波矢量和经原子范数重构的矢量化信道采用最小二乘法进行处理,以确定los载波相位。原子范数算法可降低估计信道的估计误差,将原子范数算法应用于载波相位定位技术中,可进一步提高定位精度。
153、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!