一种目标检测方法及装置
本发明涉及目标检测领域,尤其涉及一种目标检测方法及装置。
背景技术:
1、智能门锁因其安全性、便捷性和智能化而受到市场的青睐。在人脸识别功能中,为了降低功耗并延长待机时间,需要安装一个人感系统来检测目标的接近并在需要时开启摄像头。目前市面上常用的人感传感器主要有以下三种:红外传感器、超声波传感器和5.8g雷达。
2、在现有技术中红外传感器的测量距离以及精准度表现比较差,且对被测量物体颜色有要求。5.8g雷达主要应用多普勒方案,受目标影响较大,不同人群的高矮胖瘦不同,触发的距离也不尽相同。而且随着5gwifi和灯具5.8g感应雷达的普及,门锁5.8g雷达极易受到干扰,造成误识别误触发。同时目前大多数目标检测的应用场景需要目标检测长时间的运行,不仅需要准确的目标检测还需要降低功耗。
技术实现思路
1、本发明提供了一种目标检测的方法及装置,以解决在现有技术中目标检测不准确且功耗高的问题。
2、第一方面,本技术提供了一种目标检测的方法,包括:
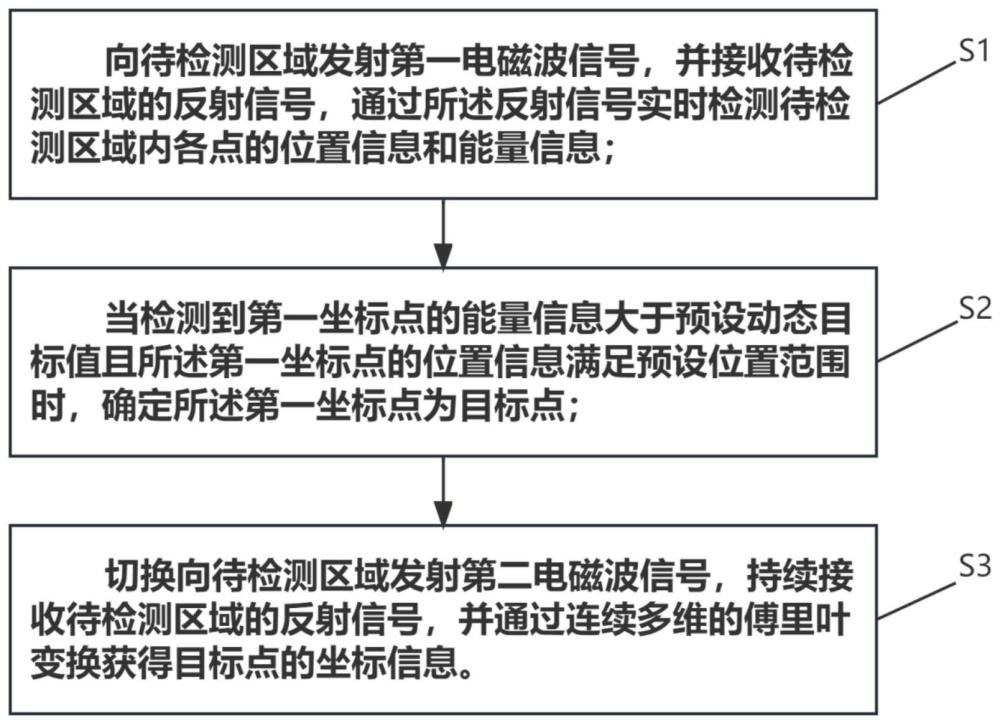
3、向待检测区域发射第一电磁波信号,并接收待检测区域的反射信号,通过所述反射信号实时检测待检测区域内各点的位置信息和能量信息;
4、当检测到第一坐标点的能量信息大于预设动态目标值且所述第一坐标点的位置信息满足预设位置范围时,确定所述第一坐标点为目标点;
5、切换向待检测区域发射第二电磁波信号,持续接收待检测区域的反射信号,并通过连续多维的傅里叶变换获得目标点的坐标信息。
6、这样通过接收待检测区域反射的电磁波信号,可以实时获取待检测区域内各点的位置信息和能量信息。这有助于准确地确定目标点的位置和能量分布情况。且通过比较能量信息最大点的能量值与预设的动态目标值,可以判断是否存在目标点。这样可以实现对动态目标的检测和识别,提高目标检测的智能化水平。进一步地,采用两种不同的电磁波信号,可以在检测到目标时再获得目标点的精确坐标信息。在未检测到满足条件的目标前发送低功耗的第一电磁波信号,在保证检测准确率的前提下降低目标检测的功耗,在检测到目标时则切换向待检测区域发送第二电磁波信号,通过连续的多维傅里叶变换,可以更准确地追踪和定位目标,提高目标检测的准确性和可靠性。
7、进一步地,在所述通过连续多维的傅里叶变换获得目标点的精确坐标信息,之后包括:
8、实时比对待检测区域中当前帧和之前若干帧之间所有点的位置信息;
9、当在当前帧和之前若干帧内在待检测区域中不存在点的位置信息在任意两帧中的变化超出预设的环境范围时,切换向待检测区域发射第一电磁波信号,并持续接收待检测区域的反射信号。
10、这样当连续若干帧没有目标移动时,则改变回发送第一电磁波信号,从而实现第一电磁波信号和第二电磁波信号之间的切换。降低目标检测的功耗,同时判断变化是否超出预设的环境范围,从而排除了由于环境背景中物体的无效运动而导致第一电磁波信号和第二电磁波信号之间的频繁切换发射。
11、进一步地,所述通过所述反射信号实时检测待检测区域内各点的位置信息和能量信息,包括:
12、将所述反射信号通过快速傅里叶变换转化为数据信号,根据所述数据信号和距离分辨率得到待检测区域中各个点的位置信息和能量信息。
13、这样可以实现对待检测区域的覆盖和信号接收,为后续处理提供必要的数据源。根据处理后的数据信号和距离分辨率,可以获得待检测区域中各个点的位置信息和能量信息。这样能够准确地了解目标点的位置分布和能量强度,为后续的目标检测和识别提供基础数据。
14、进一步地,所述在当检测到第一坐标点的能量信息大于预设动态目标值且所述第一坐标点的位置信息满足预设位置范围时,确定所述第一坐标点为目标点,之后包括:
15、当目标点的位置信息满足近处距离范围时,向系统发送第一信号,并接收系统反馈信号,对待检测区域进行人脸识别;
16、当目标点的位置信息不满足近处距离范围时,向系统发送第二信号,并接收系统反馈信号,对待检测区域进行监控录制。
17、这样当目标点的位置信息满足近处距离范围时,向系统发送第一信号,并接收系统反馈信号,对待检测区域进行人脸识别。这有助于实现对接近门锁的人脸进行识别,提高目标检测的安全性,同时在物体靠近时才采用人脸识别,可以减少系统的调用降低功耗。且当目标点的位置信息不满足近处距离范围时,向系统发送第二信号,并接收系统反馈信号,对待检测区域进行监控录制。这可以实现对远离门锁的区域进行监控录制,以便后续的安全审查和事件追溯。
18、进一步地,所述通过连续多维的傅里叶变换获得目标点的坐标信息,具体为:
19、将所述反射信号通过一维快速傅里叶变换转化为数据信号,并通过二维快速傅里叶变换获得距离速度矩阵;
20、根据目标点的能量信息获取目标点在距离速度矩阵中的位置索引值,通过三维离散傅里叶变换,获得目标点的方位角信息,并根据目标点的方位角信息和目标点在距离速度矩阵中的距离信息得到目标点的坐标信息。
21、这样通过将反射的电磁波信号进行一维快速傅里叶变换转化为数据信号,再通过二维快速傅里叶变换获得距离速度矩阵,可以将连续的时域数据转化为频域数据,并获取目标点的距离信息。这有助于对信号进行进一步的分析和处理。且根据距离速度矩阵获取所有点的信号能量,确定信号能量大于预设能量值的所有点中信号能量值最大的点为目标点。这样可以通过能量判断来确定目标点,提高目标检测的准确性。进一步地,通过三维离散傅里叶变换,可以获得目标点的方位角信息。结合目标点的方位角信息和距离信息,可以计算出目标点的精确坐标信息。这有助于门锁系统准确地定位目标点的位置,提高目标检测的精度和可靠性。
22、进一步地,在所述将所述反射信号通过快速傅里叶变换转化为数据信号,之前包括:
23、将当前帧的反射信号减去上一帧的反射信号得到微动变化值;
24、根据所述微动变化值对当前帧的反射信号进行更新。
25、这样可以检测到微动目标,可以提高系统对动态目标的灵敏度并在人体站立静止不动时不会丢失人体目标。且根据微动变化值对当前帧的反射信号进行更新。通过将微动变化值应用于当前帧的反射信号,可以消除环境噪声和干扰,提高目标点的信号强度和可靠性。
26、进一步地,所述目标点的位置信息不满足近处距离范围,包括:
27、确定所述目标点对应的目标为对象目标,并获取当前帧和之前若干帧之间所述对象目标的移动范围;
28、当所述对象目标的移动范围在第一范围内,则确定所述对象目标为环境目标,不向系统发送第二信号,同时切换向待检测区域发射第一电磁波信号。
29、这样通过获取当前帧和之前若干帧之间对象目标的移动范围,可以了解对象目标的运动情况。这有助于确定目标的性质和行为。进一步地,可以有效的对环境中花草等活动范围固定的环境目标进行准确的识别,从而排除由于环境中花草等物体的移动而频繁的切换发射的信号。进一步提高目标检测的准确性,在保证检测准确度的前提下排除环境目标的影响,减少误报和误判,提高目标检测的准确性和可靠性。
30、进一步地,在所述确定所述目标点对应的目标为对象目标,并获取当前帧和之前若干帧之间所述对象目标的移动范围,之后包括:
31、当所述对象目标的移动范围在第二范围内,则确定所述对象目标为横穿目标,不向系统发送第二信号,同时切换向待检测区域发射第一电磁波信号。
32、这样有助于识别出横穿待检测区域的目标,提高对横穿事件的感知和处理能力。且当对象目标被确定为横穿目标时,不向系统发送第二信号,可以减少系统的信号传输和处理负担,提高系统的效率和响应速度。同时在保证检测准确度的前提下排除环境目标的影响,减少误报和误判,提高目标检测的准确性和可靠性。
33、进一步地,所述当所述对象目标的移动范围在第一范围内,则确定所述对象目标为环境目标,包括:
34、根据当前帧和之前若干帧之间环境目标的位置信息,获取所述环境目标的平均位置信息;
35、根据所述平均位置信息,确定环境目标范围,并根据所述环境目标范围更新位置范围。
36、进一步地,所述接收待检测区域的反射信号,具体为:
37、控制设置于门锁上的雷达装置向待检测区域发送第一电磁波信号和第二电磁波信号,并通过所述雷达装置接收待检测区域内反射的电磁波信号;
38、其中,所述待检测区域为雷达装置所面向的区域。
39、这样对位置范围进行更新,从而在下次对目标点进行识别,可以排除环境目标中的环境物体移动,减少计算量和目标检测的功耗。防止反复的对环境目标进行识别,提高目标检测的检测效率和检测准确性。
40、第二方面,本技术提供了一种目标检测装置,包括:信息获取模块、目标点模块和坐标信息模块;
41、所述信息获取模块用于向待检测区域发射第一电磁波信号,并接收待检测区域的反射信号,通过所述反射信号实时检测待检测区域内各点的位置信息和能量信息;
42、所述目标点模块用于当检测到第一坐标点的能量信息大于预设动态目标值且所述第一坐标点的位置信息满足预设位置范围时,确定所述第一坐标点为目标点;
43、所述坐标信息模块用于切换向待检测区域发射第二电磁波信号,持续接收待检测区域的反射信号,并通过连续多维的傅里叶变换获得目标点的坐标信息。
44、进一步地,在所述坐标信息模块,之后包括:对比模块和切换模块;
45、所述对比模块用于实时比对待检测区域中当前帧和之前若干帧之间所有点的位置信息;
46、所述切换模块用于当在当前帧和之前若干帧内在待检测区域中不存在点的位置信息在任意两帧中的变化超出预设的环境范围时,切换向待检测区域发射第一电磁波信号,并持续接收待检测区域的反射信号。
47、进一步地,所述信息获取模块包括:数据信号单元;
48、所述数据信号单元用于将所述反射信号通过快速傅里叶变换转化为数据信号,根据所述数据信号和距离分辨率得到待检测区域中各个点的位置信息和能量信息。
49、进一步地,在所述目标点模块之后包括:第一信号模块和第二信号模块;
50、所述第一信号模块用于当目标点的位置信息满足近处距离范围时,向系统发送第一信号,并接收系统反馈信号,对待检测区域进行人脸识别;
51、所述第二信号模块用于当目标点的位置信息不满足近处距离范围时,向系统发送第二信号,并接收系统反馈信号,对待检测区域进行监控录制。
52、进一步地,所述坐标信息模块包括:距离单元和坐标单元;
53、所述距离单元用于将所述反射信号通过一维快速傅里叶变换转化为数据信号,并通过二维快速傅里叶变换获得距离速度矩阵;
54、所述坐标单元用于根据目标点的能量信息获取目标点在距离速度矩阵中的位置索引值,通过三维离散傅里叶变换,获得目标点的方位角信息,并根据目标点的方位角信息和目标点在距离速度矩阵中的距离信息得到目标点的坐标信息。
55、进一步地,在所述数据信号单元之前包括:微动单元和更新单元;
56、所述微动单元用于将当前帧的反射信号减去上一帧的反射信号得到微动变化值;
57、所述更新单元用于根据所述微动变化值对当前帧的反射信号进行更新。
58、进一步地,所述第二信号模块包括:移动单元和环境目标单元;
59、所述移动单元用于确定所述目标点对应的目标为对象目标,并获取当前帧和之前若干帧之间所述对象目标的移动范围;
60、所述环境目标单元用于当所述对象目标的移动范围在第一范围内,则确定所述对象目标为环境目标,不向系统发送第二信号,同时切换向待检测区域发射第一电磁波信号。
61、进一步地,在所述移动单元之后包括:横穿单元;
62、所述横穿单元用于当所述对象目标的移动范围在第二范围内,则确定所述对象目标为横穿目标,不向系统发送第二信号,同时切换向待检测区域发射第一电磁波信号。
63、进一步地,所述环境目标单元包括:平均位置子单元和更新范围子单元;
64、所述平均位置子单元用于根据当前帧和之前若干帧之间环境目标的位置信息,获取所述环境目标的平均位置信息;
65、所述更新范围子单元用于根据所述平均位置信息,确定环境目标范围,并根据所述环境目标范围更新位置范围。
66、进一步地,所述信息获取模块包括:雷达单元;
67、所述雷达单元用于控制设置于门锁上的雷达装置向待检测区域发送第一电磁波信号和第二电磁波信号,并通过所述雷达装置接收待检测区域内反射的电磁波信号;
68、其中,所述待检测区域为雷达装置所面向的区域。
69、这样通过接收待检测区域反射的电磁波信号,可以实时获取待检测区域内各点的位置信息和能量信息。这有助于准确地确定目标点的位置和能量分布情况。且通过比较能量信息最大点的能量值与预设的动态目标值,可以判断是否存在目标点。这样可以实现对动态目标的检测和识别,提高目标检测的智能化水平。进一步地,采用两种不同的电磁波信号,可以在检测到目标时再获得目标点的精确坐标信息。在未检测到满足条件的目标前发送低功耗的第一电磁波信号,在保证检测准确率的前提下降低门锁目标检测的功耗,在检测到目标时则切换向待检测区域发送第二电磁波信号,通过连续的多维傅里叶变换,可以使门锁系统更准确地追踪和定位目标,提高目标检测的准确性和可靠性。
- 还没有人留言评论。精彩留言会获得点赞!