低空复杂环境下多目标全自动跟踪方法及系统与流程
本发明涉及目标探测,尤其涉及一种低空复杂环境下多目标全自动跟踪方法及系统。
背景技术:
1、随着无人机技术的发展与应用,低空环境特别是城市低空环境日益成为无人机活动的主要区域。无人机群的活动机动性大、路线多变,加上低空环境的干扰源多,使得低空多目标探测与信息融合任务面临新的挑战。
2、与中高空目标跟踪不同,低空环境下特别是城市低空环境中,非目标运动信息非常多,比如鸟类飞行、树叶抖动、电线摇摆,以及建筑物干扰等,这使得低空环境下的雷达量测点迹信息包含了大量各类杂波、虚假点迹。
3、低空环境非目标杂波多,运动状态机动性大,以及多目标运动关联困难等因素的存在,使得现有多目标跟踪的方法和技术,不同程度地出现航迹间断、航迹偏离等异常情况,严重的直接发生航迹中断。
技术实现思路
1、本发明意在提供一种低空复杂环境下多目标全自动跟踪方法及系统,以解决现有技术中存在的不足,本发明要解决的技术问题通过以下技术方案来实现。
2、本发明提供的低空复杂环境下多目标全自动跟踪方法,包括:
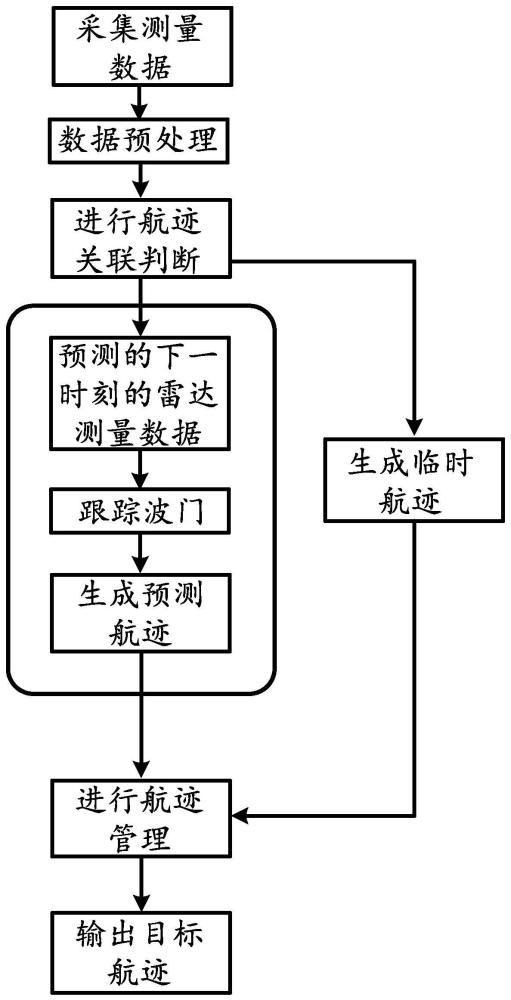
3、实时采集多个探测目标对应的雷达测量数据,并对雷达测量数据进行预处理;
4、对经过预处理的雷达测量数据与已建立的航迹进行关联判断;
5、在经过预处理的雷达测量数据与已建立的航迹相关联时,对与已建立的航迹相关联的雷达测量数据或对已建立的航迹进行特征提取,基于提取的特征预测下一时刻的雷达测量数据,并对预测的下一时刻的雷达测量数据进行筛选以及融合处理,以及基于预测航迹的总步数重复进行雷达测量数据预测、筛选和融合处理,基于重复得到的数据得到预测航迹;
6、在经过预处理的雷达测量数据与已建立的航迹不相关联时,基于与已建立的航迹不相关联的雷达测量数据生成临时航迹;
7、对以上获取的预测航迹和临时航迹进行关联判断,基于关联判断结果对预测航迹和临时航迹进行合并形成目标航迹或者删除相应的临时航迹。
8、在上述的方案中,对与已建立的航迹相关联的雷达测量数据或对已建立的航迹进行特征提取包括:将与已建立的航迹相关联的雷达测量数据或已建立的航迹输入至生成式对抗网络的生成器中,生成式对抗网络的生成器采用编码器中的特征工程模块提取位置信息、速度特征、加速度特征以及转弯特征。
9、在上述的方案中,基于提取的特征预测下一时刻的雷达测量数据包括:
10、生成式对抗网络采用编码器中的循环神经网络对提取的特征进行编码,并获取经过编码的特征对应的参数矩阵;;
11、生成式对抗网络采用生成器基于经过编码的特征对应的参数矩阵预测下一时刻的雷达测量数据,其中,预测下一时刻的雷达测量数据采用以下计算公式:
12、
13、其中,k为雷达测量数据的序列号,为下一时刻的雷达测量数据,为为序列号为k的雷达测量数据对应的下一时刻的雷达测量数据对应的特征矩阵,为为序列号为k的雷达测量数据对应的下一时刻的雷达测量数据中雷达设备在x方向的测量数据,为序列号为k的雷达测量数据对应的下一时刻的雷达测量数据中雷达设备在y方向的测量数据,为序列号为k的雷达测量数据对应的下一时刻的雷达测量数据中雷达设备在z方向的测量数据,为生成器的激活函数,为隐藏特征,wc为参数矩阵。
14、在上述的方案中,对预测的下一时刻的雷达测量数据进行筛选以及融合处理包括:
15、采用跟踪波门对下一时刻的雷达测量数据进行筛选;
16、采用汇聚层对经过筛选的下一时刻的雷达测量数据与探测目标的当前状态进行融合。
17、在上述的方案中,基于与已建立的航迹相关联的雷达测量数据和与其对应的下一时刻的雷达测量数据设置跟踪波门的取值,并将设置的跟踪波门的取值与异常值过滤半径进行比较,将大于异常值过滤半径的跟踪波门的取值对应的下一时刻的雷达测量数据进行去除,其中,跟踪波门的取值采用以下公式获取:
18、
19、其中,r为跟踪波门的取值,x为与已建立的航迹相关联的雷达测量数据中雷达设备在x方向的测量数据,y为与已建立的航迹相关联的雷达测量数据中雷达设备在y方向的测量数据,z为与已建立的航迹相关联的雷达测量数据中雷达设备在z方向的测量数据,x0为下一时刻的雷达测量数据中雷达设备在x方向的测量数据,y0为下一时刻的雷达测量数据中雷达设备在y方向的测量数据,z0为下一时刻的雷达测量数据中雷达设备在z方向的测量数据,k为雷达测量数据的序列号。
20、在上述的方案中,采用汇聚层对预测的下一时刻的雷达测量数据与探测目标的当前状态进行融合采用以下公式:
21、
22、其中,为融合结果取值,为探测目标的当前状态矩阵,θ为取值权重,θ的取值范围为0-1,为下一时刻的雷达测量数据,f(k)为状态转移矩阵。
23、在上述的方案中,基于雷达设备获取雷达测量数据的生成间隔以及采样周期得到获取预测航迹的总步数,其中,预测航迹的总步数的计算公式为:
24、nstep=ttotal/t0
25、其中,nstep是获取预测航迹的总步数,ttotal是雷达设备获取雷达测量数据的生成间隔,t0是采样周期。
26、在上述的方案中,基于与已建立的航迹不相关联的雷达测量数据确定临时航迹的起点和方向,再次实时采集与该雷达测量数据来自同一雷达设备的雷达测量数据,根据再次实时采集的雷达测量数据连续更新航迹,形成临时航迹。
27、在上述的方案中,对以上获取的预测航迹和临时航迹进行关联判断,基于关联判断结果对预测航迹和临时航迹进行合并形成目标航迹或者删除相应的临时航迹包括:
28、对以上获取的预测航迹和临时航迹进行关联判断,判断预测航迹和临时航迹属于同一探测目标时,对预测航迹和临时航迹进行合并形成目标航迹,并对与预测航迹不属于同一探测目标的临时航迹进行删除。
29、本发明提供的低空复杂环境下多目标全自动跟踪系统,采用如上所述的低空复杂环境下多目标全自动跟踪方法进行多目标全自动跟踪,所述系统包括:
30、数据预处理模块,用于实时采集多个探测目标对应的雷达测量数据,并对雷达测量数据进行预处理;
31、关联判断模块,用于对经过预处理的雷达测量数据与已建立的航迹进行关联判断;
32、预测航迹生成模块,用于在经过预处理的雷达测量数据与已建立的航迹相关联时,对与已建立的航迹相关联的雷达测量数据或对已建立的航迹进行特征提取,基于提取的特征预测下一时刻的雷达测量数据,并对预测的下一时刻的雷达测量数据进行筛选以及融合处理,以及基于预测航迹的总步数重复进行雷达测量数据预测、筛选和融合处理,基于重复得到的数据得到预测航迹;
33、临时航迹生成模块,用于在经过预处理的雷达测量数据与已建立的航迹不相关联时,基于与已建立的航迹不相关联的雷达测量数据生成临时航迹;
34、航迹管理模块,用于对以上获取的预测航迹和临时航迹进行关联判断,基于关联判断结果对预测航迹和临时航迹进行合并形成目标航迹或者删除相应的临时航迹。本发明实施例包括以下优点:
35、本发明实施例提供的低空复杂环境下多目标全自动跟踪方法及系统,通过对经过预处理的雷达测量数据与已建立的航迹进行关联判断,根据关联判断结果生成预测航迹或临时航迹,且在预测航迹生成过程中首先预测下一时刻的雷达测量数据,并对预测的下一时刻的雷达测量数据进行筛选以及融合处理,可去除预测的雷达测量数据中的异常数据和杂波数据,且通过融合处理获取高质量的预测值,通过基于总步数重复进行雷达测量数据预测、筛选和融合处理,基于重复得到的数据得到预测航迹,可避免航迹间断、航迹偏离等异常情况,此外,通过对获取的预测航迹和临时航迹进行关联判断,可实现航迹的相对准确,从而对探测目标进行精确跟踪;此外,采用生成式对抗网络生成预测航迹,采用生成式对抗网络中的生成器取代现有技术中的预测方程,实现了技术路径的优化转变,由于生成器的数据预测能力强于现有技术中的预测方程,会使得生成的预测航迹更为精确。
- 还没有人留言评论。精彩留言会获得点赞!