一种基于毫米波雷达的皮带测速方法及系统与流程
本发明涉及皮带测速,更具体地,涉及一种基于毫米波雷达的皮带测速方法及一种基于毫米波雷达的皮带测速系统。
背景技术:
1、带式输送机是大型货物运输非常重要的设备,可以应用在矿石、煤炭、粮食等货物的运输上,皮带是带式输送机的承载与输送部件,为了保证带式输送机的正常运行,需要对皮带的运行速度进行检测。皮带速度检测可以实时检测皮带的速度信息,进而判断料流和皮带运行情况,因此皮带速度的精准测量影响设备的安全稳定运行,因此如何实现皮带精准测速在各运输行业非常重要。
2、目前的皮带测速技术主要是在皮带或滚筒上安装接触式和非接触式测速装置。其中接触式测速装置存在打滑悬空导致结果不准、自身磨损和对传送皮带的磨损均比较大、更换频率高,增加了使用成本。普通非接触式的测速装置,是在从动滚筒侧面焊接一个感应面,通过速度检测器检测感应区域,读取脉冲数目来计算皮带速度,这种方式降低了设备磨损程度,但是遇到金属含量较高的货物(例如矿石),在皮带运输过程中,测速脉冲会受到干扰,存在测速不准确的风险。
技术实现思路
1、为了解决现有技术中存在的不足,本发明提供了一种基于毫米波雷达的皮带测速方法及系统,实现真正的无接触式皮带测速,无需在动滚筒侧安装标志物,利用动滚筒对毫米波雷达反馈的微多普勒速度进行高精度测速。
2、作为本发明的第一个方面,提供一种基于毫米波雷达的皮带测速方法,皮带传动连接于两个动滚筒之间,所述毫米波雷达设置在动滚筒的一侧,在当前时间段的每一帧内,所述毫米波雷达能够向皮带上的目标发射电磁波信号,并接收目标的回波信号,以得到皮带上目标的中频信号;所述基于毫米波雷达的皮带测速方法包括如下步骤:
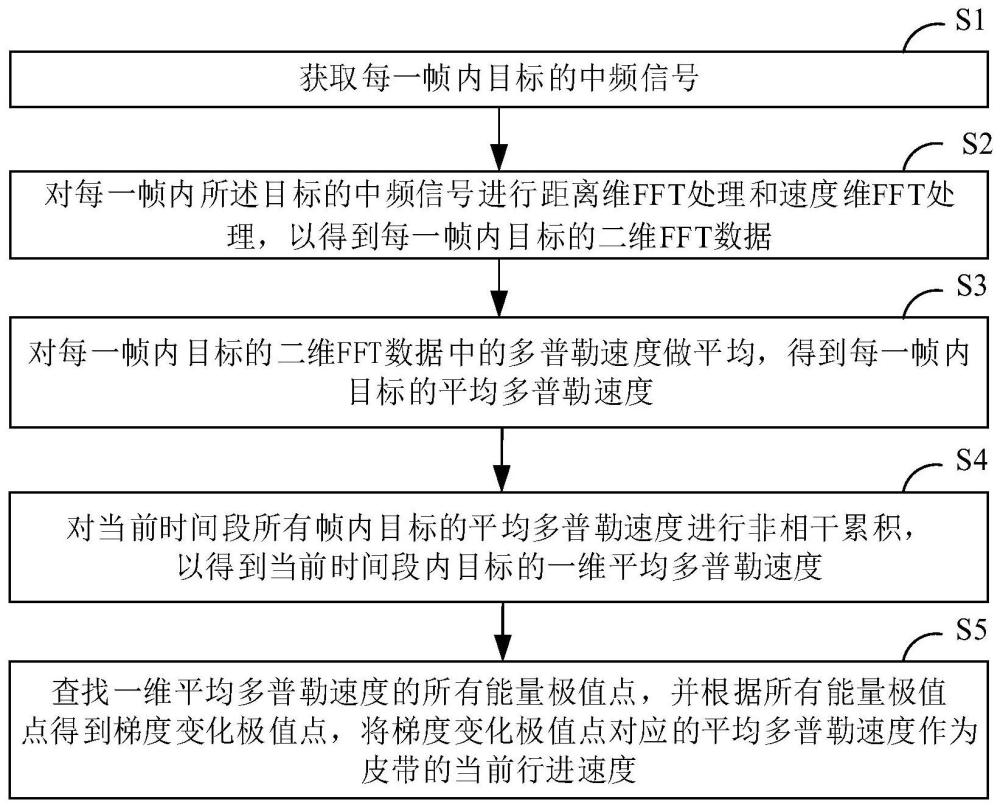
3、步骤s1:获取每一帧内目标的中频信号;
4、步骤s2:对每一帧内所述目标的中频信号进行距离维fft处理和速度维fft处理,以得到每一帧内目标的二维fft数据;
5、步骤s3:对每一帧内目标的二维fft数据中的多普勒速度做平均,得到每一帧内目标的平均多普勒速度;
6、步骤s4:对当前时间段所有帧内目标的平均多普勒速度进行非相干累积,以得到当前时间段内目标的一维平均多普勒速度;
7、步骤s5:查找一维平均多普勒速度的所有能量极值点,并根据所有能量极值点得到梯度变化极值点,将梯度变化极值点对应的平均多普勒速度作为皮带的当前行进速度。
8、进一步地,所述获取每一帧内目标的中频信号中,还包括:
9、在每一帧内,通过所述毫米波雷达发射出多个调频连续波,以得到每一个发射周期内的中频信号;其中,一个发射周期内发射出一个调频连续波,一个调频连续波对应一组中频信号。
10、进一步地,所述对每一帧内所述目标的中频信号进行距离维fft处理和速度维fft处理,以得到每一帧内目标的二维fft数据中,还包括:
11、对每一帧内的多组中频信号分别进行距离维fft处理,以得到每一帧内的多组距离维fft数据;其中,一组中频信号对应一组距离维fft数据;
12、在每一帧内的每一个距离下,对不同组中频信号之间进行速度维fft处理,以得到每一帧内的多组速度维fft数据,然后得到每一帧内目标的二维fft数据。
13、进一步地,所述对每一帧内目标的二维fft数据中的多普勒速度做平均,得到每一帧内目标的平均多普勒速度中,还包括:
14、在每一帧内对二维fft数据中的每个发射周期内的多普勒速度做平均,得到每一帧内每个发射周期的平均多普勒速度。
15、进一步地,所述对当前时间段所有帧内目标的平均多普勒速度进行非相干累积,以得到当前时间段内目标的一维平均多普勒速度中,还包括:
16、将当前时间段内所有帧的发射周期平均多普勒速度组合成一个多普勒-时间图;
17、对多普勒-时间图进行非相干累积,以得到当前时间段内目标的一维平均多普勒速度。
18、作为本发明的第二个方面,提供一种基于毫米波雷达的皮带测速系统,用于实现前述任意一项所述的基于毫米波雷达的皮带测速方法,皮带传动连接于两个动滚筒之间,所述毫米波雷达设置在动滚筒的一侧,在当前时间段的每一帧内,所述毫米波雷达能够向皮带上的目标发射电磁波信号,并接收目标的回波信号,以得到皮带上目标的中频信号;所述基于毫米波雷达的皮带测速系统包括:
19、获取模块,用于获取每一帧内目标的中频信号;
20、处理模块,用于对每一帧内所述目标的中频信号进行距离维fft处理和速度维fft处理,以得到每一帧内目标的二维fft数据;
21、第一计算模块,用于对每一帧内目标的二维fft数据中的多普勒速度做平均,得到每一帧内目标的平均多普勒速度;
22、第二计算模块,用于对当前时间段所有帧内目标的平均多普勒速度进行非相干累积,以得到当前时间段内目标的一维平均多普勒速度;
23、查找模块,用于查找一维平均多普勒速度的所有能量极值点,并根据所有能量极值点得到梯度变化极值点,将梯度变化极值点对应的平均多普勒速度作为皮带的当前行进速度。
24、本发明提供的基于毫米波雷达的皮带测速方法及系统具有以下优点:
25、(1)使用毫米波雷达技术,可以用于环境恶劣的复杂场景,比如矿下;
26、(2)非接触式,对传送皮带无损伤,且不会因为皮带抖动导致测速不准;
27、(3)无需在动滚筒上安装感应面、标志物等,成本较低;
28、(4)检测动滚筒的微多普勒速度,减少皮带上物体滑落对测速精度的影响。
技术特征:
1.一种基于毫米波雷达的皮带测速方法,其特征在于,皮带传动连接于两个动滚筒之间,所述毫米波雷达设置在动滚筒的一侧,在当前时间段的每一帧内,所述毫米波雷达能够向皮带上的目标发射电磁波信号,并接收目标的回波信号,以得到皮带上目标的中频信号;所述基于毫米波雷达的皮带测速方法包括如下步骤:
2.根据权利要求1所述的基于毫米波雷达的皮带测速方法,其特征在于,所述获取每一帧内目标的中频信号中,还包括:
3.根据权利要求2所述的基于毫米波雷达的皮带测速方法,其特征在于,所述对每一帧内所述目标的中频信号进行距离维fft处理和速度维fft处理,以得到每一帧内目标的二维fft数据中,还包括:
4.根据权利要求3所述的基于毫米波雷达的皮带测速方法,其特征在于,所述对每一帧内目标的二维fft数据中的多普勒速度做平均,得到每一帧内目标的平均多普勒速度中,还包括:
5.根据权利要求4所述的基于毫米波雷达的皮带测速方法,其特征在于,所述对当前时间段所有帧内目标的平均多普勒速度进行非相干累积,以得到当前时间段内目标的一维平均多普勒速度中,还包括:
6.一种基于毫米波雷达的皮带测速系统,用于实现权利要求1至5中任意一项所述的基于毫米波雷达的皮带测速方法,其特征在于,皮带传动连接于两个动滚筒之间,所述毫米波雷达设置在动滚筒的一侧,在当前时间段的每一帧内,所述毫米波雷达能够向皮带上的目标发射电磁波信号,并接收目标的回波信号,以得到皮带上目标的中频信号;所述基于毫米波雷达的皮带测速系统包括:
技术总结
本发明涉及皮带测速技术领域,具体公开了一种基于毫米波雷达的皮带测速方法,包括:对每一帧内目标的中频信号进行FFT处理得到二维FFT数据;对二维FFT数据中的多普勒速度做平均,得到平均多普勒速度;对所有帧内目标的平均多普勒速度进行非相干累积,得到当前时间段内目标的一维平均多普勒速度;查找一维平均多普勒速度的所有能量极值点,并根据所有能量极值点得到梯度变化极值点,将梯度变化极值点对应的平均多普勒速度作为皮带的当前行进速度。本发明还公开了一种基于毫米波雷达的皮带测速系统。本发明能够实现真正的无接触式皮带测速,无需在动滚筒侧安装标志物,利用动滚筒对毫米波雷达反馈的多普勒速度进行高精度测速。
技术研发人员:屈操,岳靓,罗宜平,陈帅
受保护的技术使用者:无锡威孚高科技集团股份有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!