一种三维激光点云扫描系统的制作方法
本技术属于三维激光扫描,更具体的说,本技术涉及一种三维激光点云扫描系统。
背景技术:
1、三维激光扫描技术克服了传统扫描技术的局限性,采用非接触主动扫描方式直接获取高精度三维数据,能够对任意模型,地物进行扫描,且没有时间限制,将现实世界的信息快速转换成能够处理的点、面数据,其具有扫描速度快、实时性强、主动性强、精度高,可准确、快速、有效地获取物体三维信息。
2、现有技术公开了一种三维激光扫描仪以及三维信息的获取方法(中国专利申请号为:201710250110.7),该现有技术方案中采用下述结构实现,即:支架、工业相机、线性激光器和动力源,工业相机和线性激光器均设置在支架上;动力源与支架传动连接,用于带动工业相机和线性激光器同轴地在水平和\或竖直方向上同步旋转运动;线性激光器用于向待测目标表面发射激光,工业相机用于获取从待测目标表面反射的激光。其采用线性激光器和工业相机结合的方式,通过线性激光器向待测目标表面投射激光,工业相机获取激光图像,同时工业相机和线性激光器能够同步地在水平和竖直方向上转动,因此能够扫描到整个空间,最终处理得到整个空间的三维数据,但该现有技术中需要线激光器输出波长保持稳定,否则,扫描采集的扫描数据质量会大大降低。
技术实现思路
1、本实用新型要解决的技术问题是提供一种三维激光点云扫描系统,以保持线激光器输出波长的稳定,提高采集的扫描数据质量。
2、为解决上述技术问题,本实用新型采用如下技术方案:
3、一种三维激光点云扫描系统,其包括:
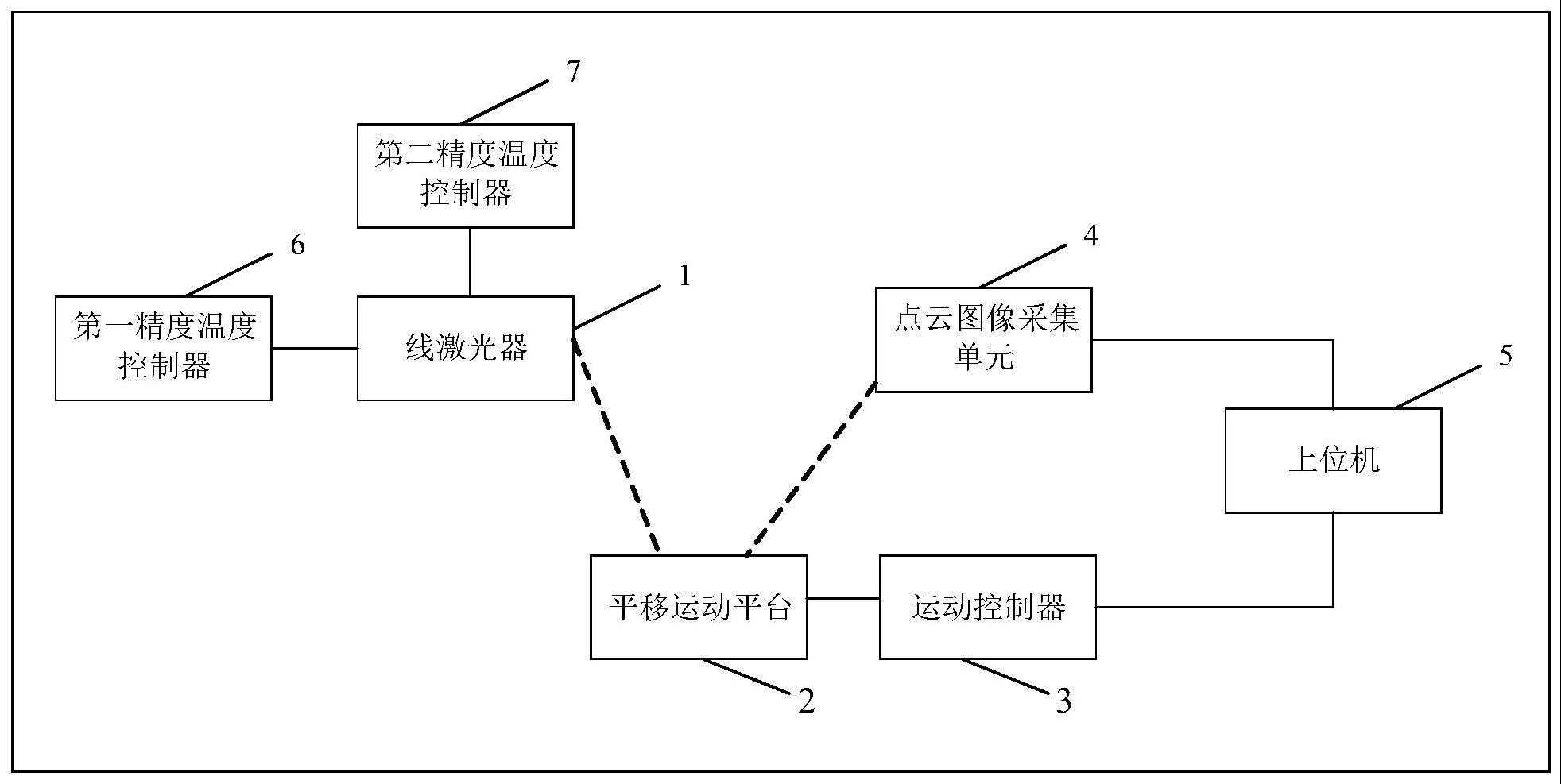
4、线激光器、平移运动平台、运动控制器、点云图像采集单元、上位机、第一精度温度控制单元和第二精度温度控制单元,所述第一精度温度控制单元包括第一精度测温器件、第一精度温控器件和第一精度温度控制器,所述第二精度控制单元包括第二精度测温器件、第二精度温控器件、差分放大器和比例积分微分控制器,其中
5、所述平移运动平台和所述运动控制器相连,所述点云图像采集单元与所述上位机相连,所述第一精度测温器件和所述第一精度温控器件设置在所述线激光器外部底座上,所述第一精度温度控制器与所述第一精度测温器件和所述第一精度温控器件相连,所述第二精度测温器件和所述第二精度温控器件设置在所述线激光器的内部,所述第二精度测温器件与所述差分放大器相连,所述差分放大器和所述第二精度温控器件均与所述比例积分微分控制器相连。
6、优选地,测温器件可为热敏电阻。
7、优选地,温控器件为半导体制冷器。
8、其中,所述第二精度高于所述第一精度。
9、作为优选地实施例,所述点云图像采集单元包括:电荷耦合器件相机和双远心镜头。
10、作为优选地实施例,所述平移运动平台包括:电机、传动机构和运动导轨,所述电机和所述传动机构相连,所述传动机构与所述运动导轨相连。
11、其中,所述电机可采用步进电机。
12、作为优选地实施例,所述第一精度温度控制器可采用单片机控制。
13、作为优选地实施例,所述单片机可采用mtd1020t温度控制器。
14、作为优选地实施例,所述比例积分微分控制器可采用ltc1923温度控制器。
15、与现有技术相比,本实用新型具有以下有益效果:
16、本实用新型的三维激光点云扫描系统中,线激光器发出的激光发射到平移运动平台上的待扫描物体上,运动控制器控制所述平移运动平台带动待扫描物体延水平方向运动,点云图像采集单元采集待测物体的三维点云图像数据并发送到上位机进行处理得到待测物体的三维扫描信息,而第一精度测温器件测量所述线激光器的温度,第一精度温度控制器将第一精度测温器件测量所得温度与预设温度进行比较,根据比较结果控制第一精度温控器件进行变温,使得线激光器达到第一精度的温度控制,第二精度测温器件测量线激光器的当前温度,差分放大器将测得温度对应的电压与预先设定的温度对应的电压进行差分放大,比例积分微分控制器根据差分放大的结果控制第二精度温控器件进行变温,使得线激光器达到第二精度的高精准温度控制,由于线激光器的输出波长可以通过控制其工作温度及注入电流进行调谐,实际应用中,通常是将温度固定,通过改变注入电流来实现波长调谐,与电流调谐相比,温度对线激光器的输出影响较大,高精度的温度控制对线激光器输出波长保持稳定至关重要,本实用新型中通过第一精度温度控制单元对线激光器进行第一精度的外部温度控制,同时,通过第二精度温度控制单元对线激光器进行第二精度的高精度内部温度控制,从而保证线激光器输出波长可以保持稳定,提高采集的扫描数据质量。
技术特征:
1.一种三维激光点云扫描系统,其特征在于,包括:
2.根据权利要求1所述的系统,其特征在于,测温器件为热敏电阻。
3.根据权利要求1所述的系统,其特征在于,温控器件为半导体制冷器。
4.根据权利要求1所述的系统,其特征在于,所述第二精度高于所述第一精度。
5.根据权利要求1所述的系统,其特征在于,所述点云图像采集单元包括:电荷耦合器件相机和双远心镜头。
6.根据权利要求1所述的系统,其特征在于,所述平移运动平台包括:电机、传动机构和运动导轨,所述电机和所述传动机构相连,所述传动机构与所述运动导轨相连。
7.根据权利要求6所述的系统,其特征在于,所述电机采用步进电机。
8.根据权利要求1所述的系统,其特征在于,所述第一精度温度控制器采用单片机控制。
9.根据权利要求8所述的系统,其特征在于,所述单片机采用mtd1020t温度控制器。
10.根据权利要求1所述的系统,其特征在于,所述比例积分微分控制器采用ltc1923温度控制器。
技术总结
本技术公开一种三维激光点云扫描系统,包括有线激光器、平移运动平台、运动控制器、点云图像采集单元、上位机、第一精度温度控制单元和第二精度温度控制单元,所述第一精度温度控制单元包括第一精度测温器件、第一精度温控器件和第一精度温度控制器,所述第二精度温度控制单元包括第二精度测温器件、第二精度温控器件、差分放大器和比例积分微分控制器,该系统通过第一精度温度控制单元对线激光器进行第一精度的外部温度控制,同时,通过第二精度温度控制单元对线激光器进行第二精度的高精度内部温度控制,从而保证线激光器输出波长可以保持稳定,提高采集的扫描数据质量。
技术研发人员:陈勇,黄美莲,张震利,宁勃义,付饶,林泽伟,胡开心,韩达光
受保护的技术使用者:广东利灏房地产有限公司
技术研发日:20230105
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!