一种无人汽车内部的检测障碍车车速装置
本技术涉及无人汽车测速,更具体地说,本技术涉及一种无人汽车内部的检测障碍车车速装置。
背景技术:
1、无人汽车是智能汽车的一种,无人汽车是指通过车载传感器系统感知道路环境,自动规划行驶路线,并对车辆进行调整以达到预定目标的智能车辆,无人汽车集成了自动调节、建筑、人工智能、视觉计算等多种技术。无人汽车是计算机科学、模式识别和智能调控技术高度发展的产物,当前方有障碍车阻碍无人汽车行驶时,无人汽车可以通过测速器感知障碍车的速度,并根据障碍车的速度进行加速或减速。
2、授权公告号为cn217181679u的实用新型公开了一种高效稳定的高速公路测速装置,支杆和安装架起到固定支撑的作用,便于安装测速装置,雷达测速仪用于检测行驶汽车的速度,摄像头用于拍摄超速汽车的照片,而无线收发器用于将超速信号传输至控制器,便于进行测速工作,摄像头、雷达测速仪和无线收发器均位于防护壳的内部,从而对元件进行防护;
3、该结构在使用时,通过雷达测速仪检测行驶汽车的速度,但是在用于无人汽车时,不能调节雷达测速仪的位置,从而导致适用范围较小。
技术实现思路
1、本实用新型技术方案针对现有技术解决方案过于单一的技术问题,提供了显著不同于现有技术的解决方案,为了克服现有技术的上述缺陷,本实用新型提供了一种无人汽车内部的检测障碍车车速装置,旨在解决上述背景技术中提出的问题。
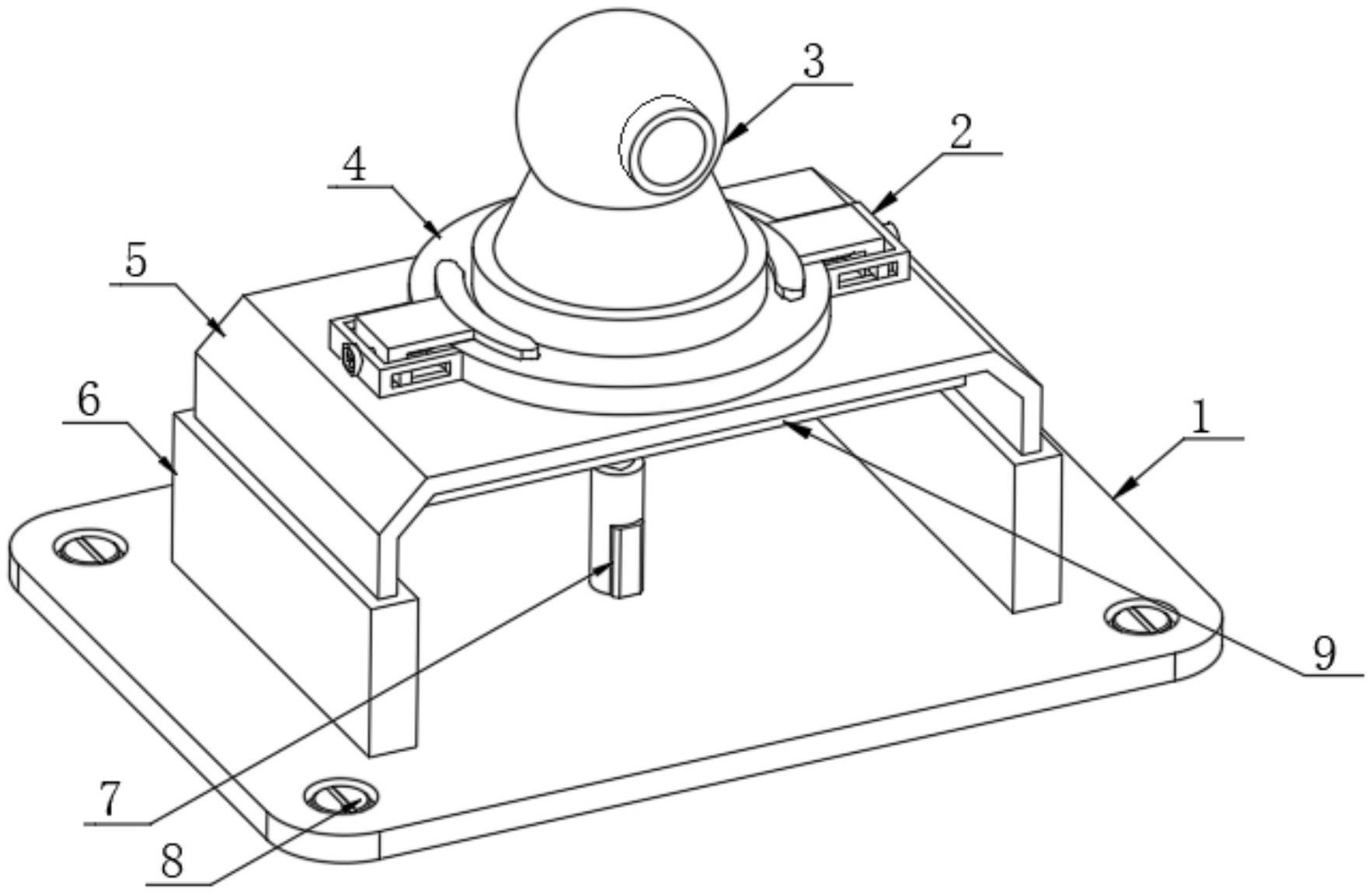
2、为实现上述目的,本实用新型提供如下技术方案:一种无人汽车内部的检测障碍车车速装置,包括雷达测速仪,所述雷达测速仪底部设有置物板,所述置物板底部设有连接架,所述连接架底端固定连接有电机,所述电机输出轴同轴传动连接有转轴,所述转轴顶端与置物板固定连接,且所述转轴与连接架通过轴承活动连接;
3、所述连接架内部固定连接有横板,且所述横板位于电机底部,所述横板底端固定连接有液压缸,所述液压缸底端固定连接有安装板。
4、进一步的,所述连接架上活动设有两个限位套,且两个所述限位套均与安装板固定连接。
5、进一步的,所述安装板上开设有四个通槽,四个所述通槽内部均设有固定螺栓。
6、进一步的,所述置物板上设有挤压组件,所述挤压组件包括两个侧框、两个螺纹杆、两个滑板、两个挤压垫以及四个边板。
7、进一步的,两个所述侧框均与置物板固定连接,两个所述滑板分别与两个螺纹杆螺纹连接,两个所述挤压垫分别与两个滑板固定连接,四个所述边板分别与两个滑板固定连接,且四个所述边板分别延伸入两个侧框内部。
8、进一步的,两个所述侧框相背的一侧均设有把手,且两个所述把手分别与两个螺纹杆固定连接,两个所述螺纹杆分别与两个侧框通过轴承活动连接。
9、本实用新型的技术效果和优点:
10、1、本实用新型通过电机工作带动转轴转动,从而带动置物板转动,进而带动雷达测速仪转动,可以调节雷达测速仪的位置,启动液压缸,液压缸伸长带动横板向上移动,从而带动连接架向上移动,进而带动雷达测速仪向上移动,同理液压缸收缩带动雷达测速仪向下移动,调节雷达测速仪的高度,结构简单,方便调节雷达测速仪的位置,适用范围广;
11、2、本实用新型通过转动把手从而带动螺纹杆转动,螺纹杆带动滑板水平移动,从而带动挤压垫水平移动,使得挤压垫远离雷达测速仪,从而解除对雷达测速仪的挤压固定,取下雷达测速仪并对其进行检修更换,结构简单,方便进行检修。
技术特征:
1.一种无人汽车内部的检测障碍车车速装置,包括雷达测速仪(3),所述雷达测速仪(3)底部设有置物板(4),其特征在于:所述置物板(4)底部设有连接架(5),所述连接架(5)底端固定连接有电机(10),所述电机(10)输出轴同轴传动连接有转轴(11),所述转轴(11)顶端与置物板(4)固定连接,且所述转轴(11)与连接架(5)通过轴承活动连接;
2.根据权利要求1所述的一种无人汽车内部的检测障碍车车速装置,其特征在于:所述连接架(5)上活动设有两个限位套(6),且两个所述限位套(6)均与安装板(1)固定连接。
3.根据权利要求1所述的一种无人汽车内部的检测障碍车车速装置,其特征在于:所述安装板(1)上开设有四个通槽,四个所述通槽内部均设有固定螺栓(8)。
4.根据权利要求1所述的一种无人汽车内部的检测障碍车车速装置,其特征在于:所述置物板(4)上设有挤压组件(2),所述挤压组件(2)包括两个侧框(201)、两个螺纹杆(202)、两个滑板(203)、两个挤压垫(204)以及四个边板(205)。
5.根据权利要求4所述的一种无人汽车内部的检测障碍车车速装置,其特征在于:两个所述侧框(201)均与置物板(4)固定连接,两个所述滑板(203)分别与两个螺纹杆(202)螺纹连接,两个所述挤压垫(204)分别与两个滑板(203)固定连接,四个所述边板(205)分别与两个滑板(203)固定连接,且四个所述边板(205)分别延伸入两个侧框(201)内部。
6.根据权利要求4所述的一种无人汽车内部的检测障碍车车速装置,其特征在于:两个所述侧框(201)相背的一侧均设有把手(206),且两个所述把手(206)分别与两个螺纹杆(202)固定连接,两个所述螺纹杆(202)分别与两个侧框(201)通过轴承活动连接。
技术总结
本技术公开了一种无人汽车内部的检测障碍车车速装置,具体涉及无人汽车测速技术领域,包括雷达测速仪,雷达测速仪底部设有置物板,置物板底部设有连接架,连接架底端固定连接有电机,电机输出轴同轴传动连接有转轴,转轴顶端与置物板固定连接,且转轴与连接架通过轴承活动连接。本技术通过电机工作带动转轴转动,从而带动置物板转动,进而带动雷达测速仪转动,可以调节雷达测速仪的位置,启动液压缸,液压缸伸长带动横板向上移动,从而带动连接架向上移动,进而带动雷达测速仪向上移动,同理液压缸收缩带动雷达测速仪向下移动,调节雷达测速仪的高度,结构简单,方便调节雷达测速仪的位置,适用范围广。
技术研发人员:杜小龙,买买提江·吐尔逊
受保护的技术使用者:新疆大学
技术研发日:20230106
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!