基于YOLOv3的桥梁裂缝检测装置的制作方法
本技术涉及一种裂缝检测装置,尤其涉及一种基于yolov3的桥梁裂缝检测装置。
背景技术:
1、桥梁结构在经历长年的日晒雨淋和各种荷载作用之下,慢慢会呈现出各种疲劳、损害、裂缝的现象,一旦混凝土桥梁出现裂缝,那么空气中的co2就很容易渗透到混凝土内部,加之潮湿的环境,co2与水泥中的氢氧化钙、硅酸三钙、硅酸二钙相互作用并转化成碳酸盐,中和水泥的基本碱性,从而导致混凝土的碱度降低,使钢筋的纯化膜遭受破坏,容易引起锈蚀,此外,混凝土碳化也会加剧收缩开裂,对桥梁结构造成破坏,这会直接影响到桥梁的安全状况。
2、当前我国主要的裂缝检测方法还是以人工检测为主,这样不仅不能保证检测的效率,还容易引发安全问题,而且桥梁上裂缝的检测并非单独一处,常会进行多点检测,操作繁琐。因此,如何降低人工成本、提高桥梁裂缝检测效率已经成为一个重要的研究方向。
3、爬壁机器人是指可以在垂直墙壁上攀爬并完成作业的自动化机器人,必须具备吸附和移动两个基本功能,爬壁机器人主要用于石化企业对圆柱形大罐进行探伤检查或喷漆处理,或进行建筑物的清洁和喷涂。在核工业中用来检查测厚等,还可以用于消防和造船等行业。
技术实现思路
1、本实用新型的目的就在于提供一种解决上述问题,无需大量人工介入、克服人工介入操作繁琐、检测效率低、人工成本高等问题,可进行多点检测、操作简单的基于yolov3的桥梁裂缝检测装置。
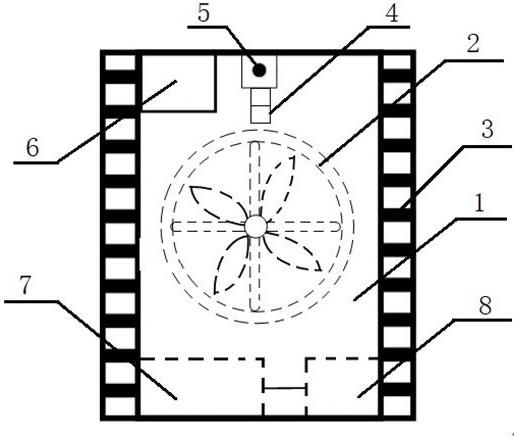
2、为了实现上述目的,本实用新型采用的技术方案是这样的:一种基于yolov3的桥梁裂缝检测装置,包括爬壁机器人,所述爬壁机器人顶部设有一机械臂,机械臂底部固定在爬壁机器人上,顶部连接一摄像头,爬壁机器人内部设有一yolov3目标检测识别单元;
3、所述机械臂用于带动摄像头在三维方向上移动;
4、所述摄像头用于拍摄桥梁上的图像;
5、所述yolov3目标检测识别单元用于从图像中的裂缝进行识别;
6、所述爬壁机器人、机械臂、摄像头、yolov3目标检测识别单元均连接控制器,由控制器控制其工作。
7、作为优选:所述爬壁机器人包括位于中心的真空吸附组件、真空吸附组件两侧的移动组件,所述移动组件为履带传动结构。
8、作为优选:所述控制器采用imx6ull芯片,且与述爬壁机器人、机械臂、摄像头、yolov3目标检测识别单元通过电缆连接。
9、作为优选:所述yolov3目标检测识别单元还连接一无线通信模块,用于通过无线通信模块与上位机无线通信。
10、作为优选:所述yolov3目标检测识别单元包括一atals200 ai加速模块,且atals200 ai加速模块中加载有用于对裂缝进行识别的yolov3目标识别模型。
11、作为优选:还包括为上述各用电单元供电的电源,所述电源为太阳能供电单元,位于爬壁机器人顶部。
12、与现有技术相比,本实用新型的优点在于:
13、本实用新型整体采用爬壁机器人带动,可以在垂直的墙壁上攀爬,从而能沿着桥梁的桥墩向上运动,并经桥墩支座翻越至桥板和桥面;机械臂能带动摄像头在三维方向上移动,摄像头可以采集到爬壁机器人周围360°范围内的图像,采集图像更加方便简单;yolov3目标检测识别单元主要用于从摄像头采集到的图像中,识别出裂缝。
14、本实用新型可以的爬壁机器人采用真空吸附组件和履带传动结构,利用真空吸附组件抽空爬壁机器人内部的空气,从而造成真空负压的情况,利用大气压的压力可以把爬壁机器人牢牢的贴在桥体上,而履带的结构可以轻松克服桥体结构凹凸不平的特点,从而可以移动到桥体的任意位置。
15、本实用新型可以直接对桥梁的裂缝进行图像采集和裂缝识别,具有检测面积大、无需人工识别、安装灵活、操作便捷等优点,可以有效提高桥梁裂缝检测的效率,具有一定的实用价值和意义。
技术特征:
1.一种基于yolov3的桥梁裂缝检测装置,包括爬壁机器人,其特征在于:所述爬壁机器人顶部设有一机械臂,机械臂底部固定在爬壁机器人上,顶部连接一摄像头,爬壁机器人内部设有一yolov3目标检测识别单元;
2.根据权利要求1所述的基于yolov3的桥梁裂缝检测装置,其特征在于:所述控制器采用imx6ull芯片,且与述爬壁机器人、机械臂、摄像头、yolov3目标检测识别单元通过电缆连接。
3.根据权利要求1所述的基于yolov3的桥梁裂缝检测装置,其特征在于:所述yolov3目标检测识别单元还连接一无线通信模块,用于通过无线通信模块与上位机无线通信。
4.根据权利要求1所述的基于yolov3的桥梁裂缝检测装置,其特征在于:所述yolov3目标检测识别单元包括一atals200 ai加速模块,且atals200 ai加速模块中加载有用于对裂缝进行识别的yolov3目标识别模型。
5.根据权利要求1所述的基于yolov3的桥梁裂缝检测装置,其特征在于:还包括为上述各用电单元供电的电源,所述电源为太阳能供电单元,位于爬壁机器人顶部。
技术总结
本技术公开了一种基于YOLOv3的桥梁裂缝检测装置,包括爬壁机器人,所述爬壁机器人顶部设有一机械臂,机械臂底部固定在爬壁机器人上,顶部连接一摄像头,爬壁机器人内部设有一YOLOv3目标检测识别单元,所述机械臂用于带动摄像头在三维方向上移动;所述摄像头用于拍摄桥梁上的图像;所述YOLOv3目标检测识别单元用于从图像中的裂缝进行识别;所述爬壁机器人、机械臂、摄像头、YOLOv3目标检测识别单元均连接控制器,由控制器控制其工作。本技术可以直接对桥梁的裂缝进行图像采集和裂缝识别,具有检测面积大、无需人工识别、安装灵活、操作便捷等优点,可以有效提高桥梁裂缝检测的效率,具有一定的实用价值和意义。
技术研发人员:刘恭立,姚龙,刘兴,陈克家,张勇,顾威,田丰
受保护的技术使用者:贵州黔贵工程技术服务咨询有限公司
技术研发日:20230112
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!