一种自动脱钩装置的制作方法
本技术属于冲击测试,特别涉及一种自动脱钩装置。
背景技术:
1、在进行冲击测试时,冲击锤通过提升装置进行提升,但为了实现冲击锤的快速下降,本企业在研发过程中想到采用脱钩装置进行冲击锤固定的方式,但在实际操作过程中,由于采用的是手动脱钩装置,需要通过拉绳来实现上钩以及脱钩,但也因为拉绳的原因,存在冲击锤下降时和拉绳发生牵连,导致安全隐患的问题。
技术实现思路
1、本实用新型的目的在于提供一种自动脱钩装置,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
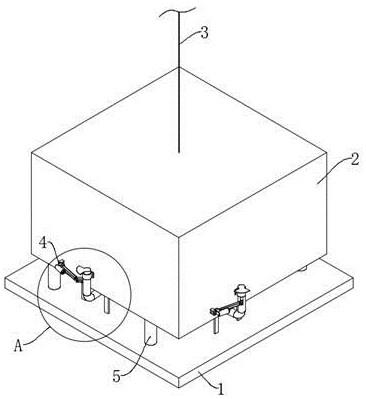
3、一种自动脱钩装置,包括脱钩组件,所述脱钩组件包括电动推杆,所述电动推杆的伸缩端铰接有第一底座,所述第一底座固定连接有锁紧杆,所述锁紧杆竖直设置,且所述锁紧杆的轴体上套装有安装座,所述安装座固定安装于升降框架的外表面;其中,所述电动推杆启动时,所述锁紧杆以自身竖直方向的轴体中心线转动,实现和冲击锤的上钩/脱钩。
4、与现有技术相比,本技术方案具有如下效果:
5、本装置相对而言结构简单,所采用的零部件基本上也都是市面上容易采购或者便于加工的,能够有效降低实际生产成本以及制作难度,其次,在脱钩或锁付的工作过程中,所针对的对象都是同一物体,且相较于传统的通过人工操作而言,全自动,释放人工,实现远程操作,避免安全问题。
6、作为优选,还包括以锁紧杆竖直方向的轴体中心线对此设置的两个传感器,且所述锁紧杆的上端固设有挡片,在所述锁紧杆转动至极限位置时,所述挡片会遮挡对应传感器的信号。
7、作为优选,所述锁紧杆为l型轴,所述l型轴的长轴和所述安装座连接,所述l型轴的短轴用于对冲击锤上钩/脱钩。
8、作为优选,还包括设置有电磁吸盘,所述电磁吸盘固设于所述升降框架上,且所述电磁吸盘的吸附端在提升状态时吸附于所述冲击锤的上端面。
9、作为优选,所述冲击锤的上端面还设置有定位件,所述升降框架的下端面设置有指示位置,在提升状态时,所述定位件指向所述指示位置,且所述定位件的上端和所述指示位置触接。
10、作为优选,还包括设置有第二底座,所述第二底座固设于所述升降框架的外表面,所述电动推杆的安装端铰接于所述第二底座上。
11、作为优选,所述挡片为扇形片。
技术特征:
1.一种自动脱钩装置,包括脱钩组件(4),其特征在于:所述脱钩组件(4)包括电动推杆(40),所述电动推杆(40)的伸缩端铰接有第一底座(42),所述第一底座(42)固定连接有锁紧杆(43),所述锁紧杆(43)竖直设置,且所述锁紧杆(43)的轴体上套装有安装座(44),所述安装座(44)固定安装于升降框架(2)的外表面;其中,所述电动推杆(40)启动时,所述锁紧杆(43)以自身竖直方向的轴体中心线转动,实现和冲击锤(1)的上钩/脱钩。
2.如权利要求1所述的一种自动脱钩装置,其特征在于:还包括以锁紧杆(43)竖直方向的轴体中心线对此设置的两个传感器,且所述锁紧杆(43)的上端固设有挡片(45),在所述锁紧杆(43)转动至极限位置时,所述挡片(45)会遮挡对应传感器的信号。
3.如权利要求2所述的一种自动脱钩装置,其特征在于:所述锁紧杆(43)为l型轴,所述l型轴的长轴和所述安装座(44)连接,所述l型轴的短轴用于对冲击锤(1)上钩/脱钩。
4.如权利要求1-3中任一项所述的一种自动脱钩装置,其特征在于:还包括设置有电磁吸盘,所述电磁吸盘固设于所述升降框架(2)上,且所述电磁吸盘的吸附端在提升状态时吸附于所述冲击锤(1)的上端面。
5.如权利要求4所述的一种自动脱钩装置,其特征在于:所述冲击锤(1)的上端面还设置有定位件,所述升降框架(2)的下端面设置有指示位置,在提升状态时,所述定位件指向所述指示位置,且所述定位件的上端和所述指示位置触接。
6.如权利要求4所述的一种自动脱钩装置,其特征在于:还包括设置有第二底座(41),所述第二底座(41)固设于所述升降框架(2)的外表面,所述电动推杆(40)的安装端铰接于所述第二底座(41)上。
7.如权利要求2所述的一种自动脱钩装置,其特征在于:所述挡片(45)为扇形片。
技术总结
一种自动脱钩装置,属于冲击测试技术领域,包括脱钩组件,所述脱钩组件包括电动推杆,所述电动推杆的伸缩端铰接有第一底座,所述第一底座固定连接有锁紧杆,所述锁紧杆竖直设置,且所述锁紧杆的轴体上套装有安装座,所述安装座固定安装于升降框架的外表面;其中,所述电动推杆启动时,所述锁紧杆以自身竖直方向的轴体中心线转动,实现和冲击锤的上钩/脱钩;本装置相对而言结构简单,所采用的零部件基本上也都是市面上容易采购或者便于加工的,能够有效降低实际生产成本以及制作难度,其次,在脱钩或锁付的工作过程中,所针对的对象都是同一物体,且相较于传统的通过人工操作而言,全自动,释放人工,实现远程操作,避免安全问题。
技术研发人员:陈伟锋,冉骥,郑合祥,熊晓荣,陈金涛,夏琦炜,曾庆乾,何民江
受保护的技术使用者:杭州德泰人防设备有限公司
技术研发日:20230215
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!