用于无人机的多容器水体自动采样装置
本技术涉及水体监测的采样装置,尤其涉及自动水体采样装置。
背景技术:
1、以往的水域监测采样模式主要以人工操作水质采样器进行采集样本,虽然有了自动采样器等可以定时关启采样的新装置,但仍和人工操作有着同样的通病,那就是采样不规范、采样容量控制不准确,无法快速方便的进行多区域水样监测采集,移动和操作繁琐笨重。对于一些宽度超过50米的河道、渠道等需要采集多个断面的水样时,采样人员需要乘坐船只等工具前往河道中心和对岸,一方面增加了采样人员的工作危险系数,容易发生意外事故;另一方面就是所乘坐的船只等工具不可避免的会搅动水体,导致所采样本不能准确反应水体的真实情况,所以传统的水域监测采样模式正朝着智能无人机方向发展。
2、现有许多研究也提出了无人机采样模型,如已公开的专利cn115165472a,其中的水样采集装置就是配合无人机进行使用,此装置每次采样时需要进行标记,且装置的部件比较多。
3、基于上述说明,2022年我们提出了基于无人机的智能水体监测采样设备,实际应用中能实现对于水面下10厘米以内的水体的采样;需要对于深水采样的时候,现有设备无法达到定深采样,比如需要采样水面30厘米以下,设备无法实现定深控制。
技术实现思路
1、基于上述问题,本实用新型提出了一种用于无人机的多容器自动水体采样装置,实现无人机一次性飞行采集多个样本点的水体,并能准确控制每个容量瓶所采集样本的容量;通过安装电动推杆,电动推杆的伸缩,带动可伸缩波纹管的伸缩,实现定深采样;通过伺服舵机准确控制水泵出水口对准位于不同位置的采样瓶口,实现多容器水样采集;通过继电器控制水泵的启停时间,实现按需、准确采集样本容量。本装置能对水下30-50厘米深处进行采样。
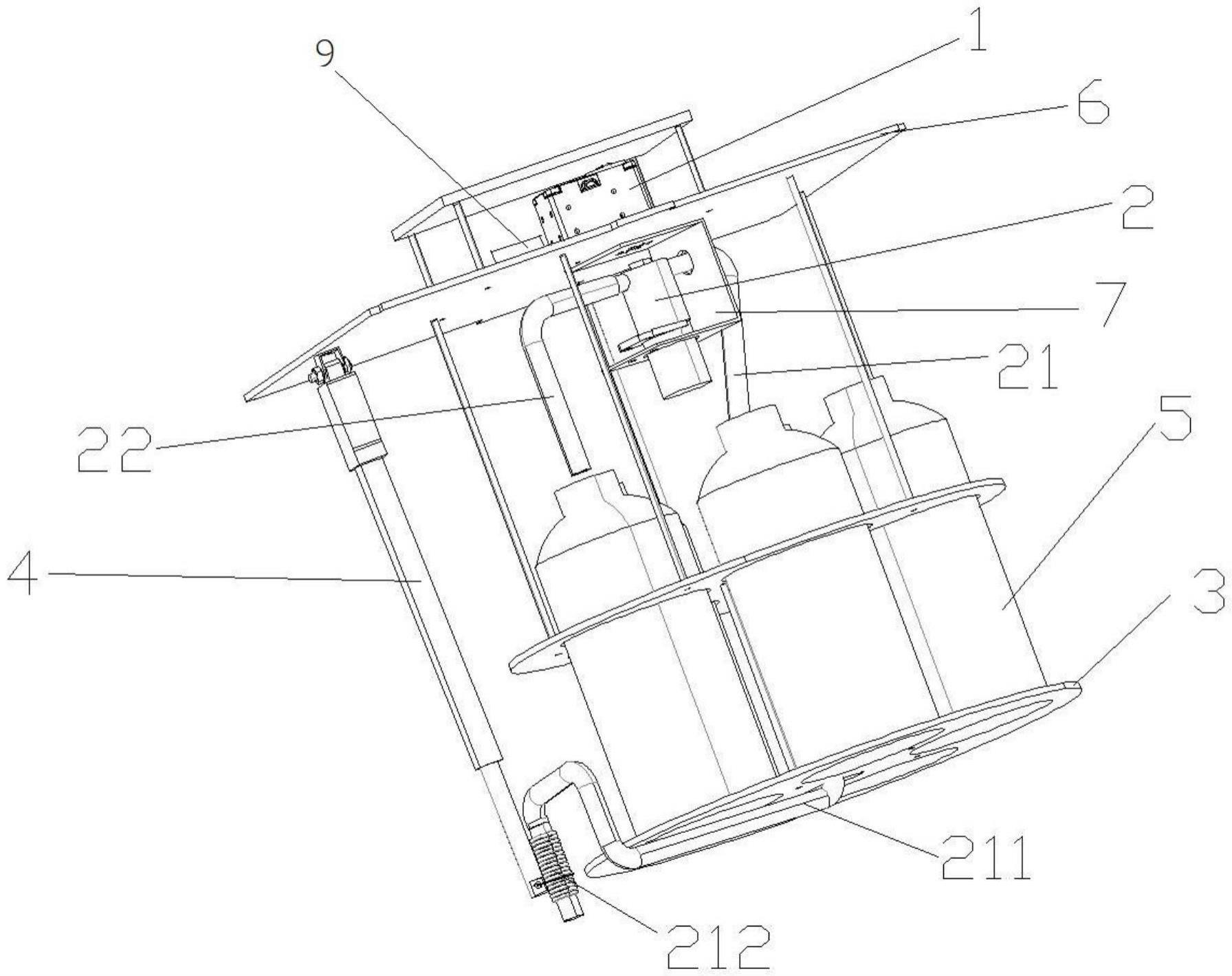
2、所采用的技术方案是:用于无人机的多容器水体自动采样装置,包括openrb-150控制板、伺服舵机、水泵、采样瓶固定装置、电动推杆;采样瓶固定装置上放置有采样瓶;伺服舵机固定在平台上方;旋转支架位于平台的下方,与伺服舵机相连接;水泵安装在旋转支架上。
3、采样瓶固定装置包括上层支架和下层支架;下层支架上均匀开有若干个凹槽,与凹槽相对应的上层支架处,开有通孔;采样瓶穿过上层支架的通孔放置在下层支架的凹槽内;
4、水泵的进水口连接进水管,出水口连接出水管;出水管的出水端位于上层支架的上方;进水管的一端穿过下层支架,与电动推杆的一端连接;电动推杆另一端固定在平台上。
5、进水管包括可伸缩波纹管和橡胶水管;橡胶水管的一端与水泵进水口相连接,另一端套设在可伸缩波纹管的一端,通过过盈配合方式将两者连接在一起;可伸缩波纹管的另一端与电动推杆一端相连接,通过自锁扎带固定在电动推杆末端的安装孔上。
6、进一步的,上层支架和下层支架之间安装有若干根支撑柱;上层支架通过若干根连接柱与平台相连接。
7、进一步的,水泵由openrb-150和继电器控制其启停时间,实现准确控制采集只采样瓶中的水量。
8、进一步的,伺服舵机通过带动水泵的旋转,从而准确控制水泵出水口准确旋转至位于不同位置的采样瓶,实现采集不同采样点的水体至所设置的采样瓶中。
9、利用用于无人机的多容器水体自动采样装置,步骤如下:
10、步骤一:无人机抵达指定区域后,无人机下降并浮停在水面上,上位机发送角度指令到openrb-150控制板上,openrb-150控制板控制伺服舵机进行旋转;伺服舵机带动水泵的转动,从而改变水泵上的出水管的方向,使出水管处于即将采集水样的瓶口上方;openrb-150控制板通过控制继电器实现对电动推杆的控制,电动推杆伸出去时,带动可伸缩波纹管伸长,达到符合国家水质采样所要求的深度;上位机通过串口通讯方式发送指令到openrb-150控制板,启动水泵,通过泵的进水管、出水管,水样进入采样瓶,根据设定时间,定量采样完成,关闭水泵;
11、步骤二:基于步骤一,采样完成后,openrb-150控制板通过控制继电器控制电动推杆缩回,带动可伸缩波纹管缩回;如需继续采样,无人机根据设定位置抵达下一目标地点后,伺服舵机控制水泵转动,使水泵的出水管转至下一瓶口和相邻瓶口之间的空隙上方,水泵的进水管在目标地点吸取设定的时间,出水管位于两个相邻采样瓶的上方,水通过瓶托上的出水口流出,除去管内上一区域残留水样;再重复步骤一中的采样动作。
12、步骤三:采样工作完成设定要求,无人机返航,操作人员拿出采样瓶。
13、本实用新型适用于多种取样需求的环境,通过控制电动推杆的行程,来控制进水管进入水体的深度,达到符合国家水质采样定深采样的规范化要求,并能实现无人机一次飞行即可采集多个水样,且每个水样的采集容量也能准确控制,提高了水体采样质量,更好的服务日常水体监测和水体科研工作。
14、本实用新型的上位机采用安装了ros系统的nuc机载电脑。下位机使用openrb-150控制板,并通过串口通信方式与上位机进行数据交互,通过ros的分布式控制架构也能实现跟地面工作站的人机交互界面进行数据交互。
15、在无人机悬浮水面停稳时,水泵上的进水管中的可伸缩波纹管通过电动推杆进入水体中,伺服舵机带动水泵进行转动,将水泵的出水管位于相对应的采样瓶的瓶口上方,控制水泵的进水管进行所需水样的收集,水样采集到采集瓶中,采集完毕后,水泵停止工作;电动推杆回缩,带动可伸缩波纹管回缩,无人机根据设定抵达下一目标地点,水体取样装置将进行排空处理;通过伺服舵机的控制,转动水泵,将水泵上的出水管转至位于即将收集水样的采样瓶和向量采样瓶的间隙位置,电动推杆伸出,水泵的进水管在目标地点吸取一段时间,直到水泵的出水管流出持续稳定的水流,上一区域残留水样基本清除,防止下一次采样时造成污染,排空完成后,伺服舵机控制水泵转动,转至下一待收集水样的采样瓶的瓶口上方,重复取样操作。
16、本实用新型中的伺服舵机和水泵的控制由与安装ros系统的上位机进行串口通信的openrb-150控制板控制。通过上位机发送角度指令到openrb-150控制板上,控制板进而控制伺服舵机进行旋转;水泵的运转由继电器进行控制,通过上位机发送相关指令发送到openrb-150控制板上,进而控制水泵的启停,实现水样采集的功能;电动推杆的伸缩控制由继电器进行控制,通过上位机发送相关指令发送到openrb-150控制板上,进而控制继电器完成对电动推杆的伸缩控制,实现定深采样需求。
技术特征:
1.用于无人机的多容器水体自动采样装置,其特征在于:包括openrb-150控制板、伺服舵机、水泵、采样瓶固定装置、电动推杆;所述的采样瓶固定装置上放置有采样瓶;伺服舵机固定在平台上方;旋转支架位于平台的下方,与伺服舵机相连接;水泵安装在旋转支架上;
2.根据权利要求1所述的用于无人机的多容器水体自动采样装置,其特征在于所述的上层支架和下层支架之间安装有若干根支撑柱;上层支架通过若干根连接柱与平台相连接。
3.根据权利要求1所述的用于无人机的多容器水体自动采样装置,其特征在于所述的水泵由openrb-150和继电器控制其启停时间,准确控制采集量。
4.根据权利要求1所述的多容器水体自动采样装置,其特征在于所述的伺服舵机通过带动水泵的旋转,准确控制水泵上的出水管位置,准确旋转至位于不同位置的采样瓶。
技术总结
本技术公开一种用于无人机的多容器水体自动采样装置,包括OpenRB‑150控制板、伺服舵机、水泵、采样瓶固定装置、电动推杆;采样瓶固定装置上放置有采样瓶;伺服舵机固定在平台上方;旋转支架位于平台的下方,与伺服舵机相连接;水泵安装在旋转支架上;电动推杆连接水泵上的进水管。本技术通过与无人机连接,到达指定水域检测点,通过电动推杆的伸缩行程,带动进水管中波纹管的伸缩,控制波纹管进入水体的深度,实现水下30‑50cm精准取样的要求,同时,通过继电器控制水泵的启停和伺服舵机控制水泵出水口对准不同位置的采样瓶,实现了一次性多容器采样和准确的采样量。
技术研发人员:谢宇飞,邓文斌,严乔滨,吴成泰,吴俊良,宋向阳,刘泓锐
受保护的技术使用者:嘉兴学院
技术研发日:20230324
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!