一种基于Maxwell有限元仿真计算永磁电机齿槽转矩的方法与流程
本发明涉及永磁电机的设计,尤其涉及一种基于maxwell有限元仿真计算永磁电机齿槽转矩的方法。
背景技术:
1、目前电机设计中,有限元仿真核算越来越广泛。而在众多的电机仿真软件中,ansys maxwell有限元仿真是众多电机工程师中使用最广泛的一款。而对于有限元方法来讲,网格划分的质量对结果的精度影响很大。maxwell 2d中,软件可以自动的进行网格划分,但是,软件的自动划分网格并不非常智能,往往只能均匀用力,均匀加密全局网格,不能突出重点需要加密的位置,导致计算时间太长,齿槽转矩计算结果不准确,最终导致电机定位转矩大、转矩脉动偏大,影响电机控制精度等。当网格划分达到千万个的级别时,对电脑性能要求很高,需要服务器才能处理,且计算时间很长,有时候计算一个数据就需要花费一个月时间,导致研发周期长且不可控。
2、有鉴于此,有必要对现有基于maxwell有限元仿真计算永磁电机齿槽转矩的方法做出改进,以便能够提升电机性能计算的准确度,从而能适用于新的/更高的使用要求。
技术实现思路
1、为克服现有技术中通过有限元仿真计算永磁电机齿槽转矩的方法存在的缺陷,如仿真计算不准确,导致仿真时不能收敛,仿真时间过长的问题,本发明的实施例提供一种基于maxwell有限元仿真计算永磁电机齿槽转矩的方法,包括如下步骤:
2、建立永磁电机maxwell 2d瞬态场的仿真模型;
3、对所述仿真模型进行网格密度的手工划分,得到手工划分网格,所述手工划分网格包括部件网格和气隙网格,所述部件网格是按照各部件材料的差异进行网格密度的划分而得到;
4、根据所述手工划分网格计算齿槽转矩。
5、本发明实施例的基于maxwell有限元仿真计算永磁电机齿槽转矩的方法还可采用如下优选/可选的具体实施方式:
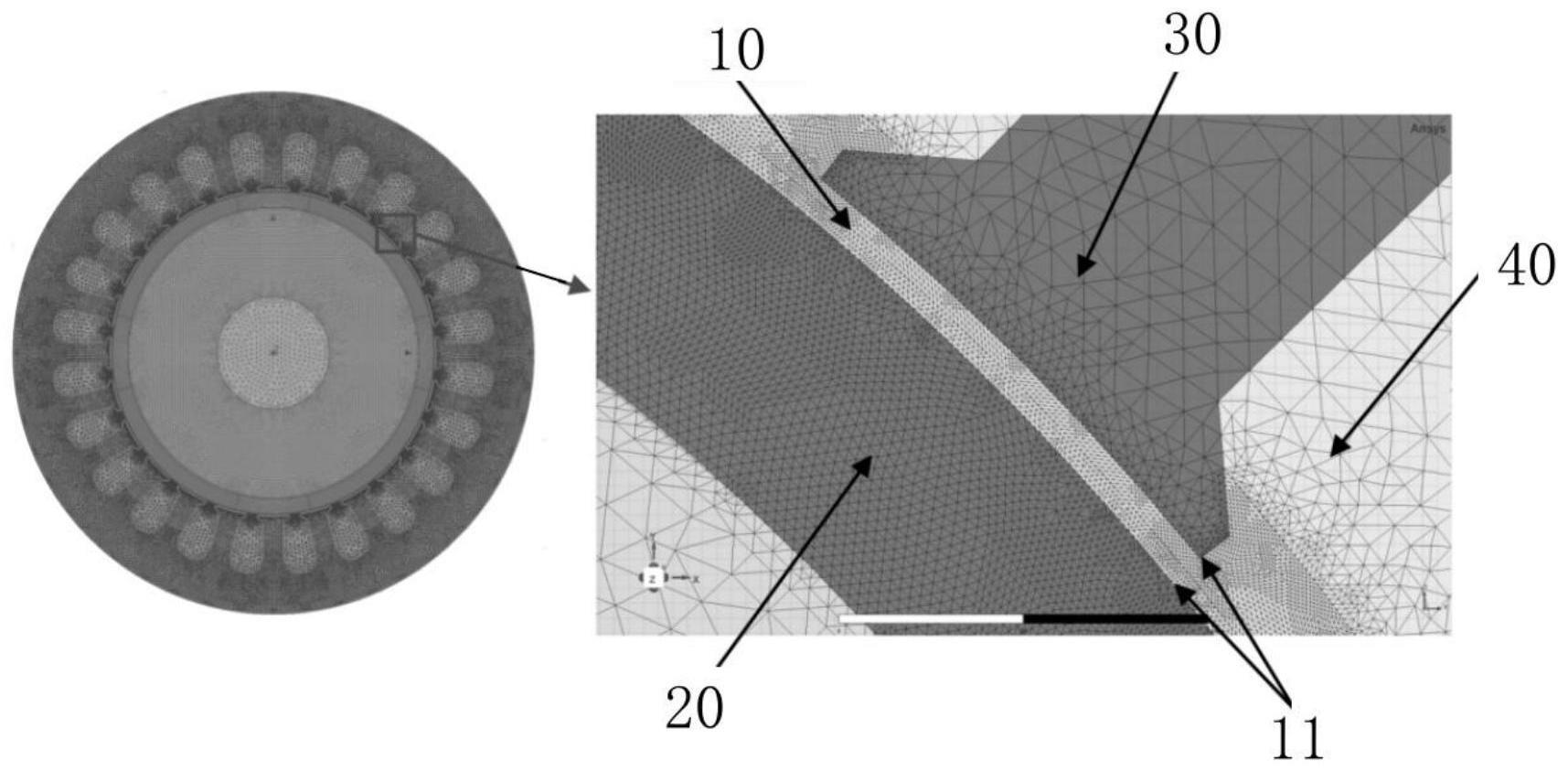
6、所述仿真模型包括气隙模型、永磁体模型、硅钢片模型、定子齿模型、定子槽模型和转轴模型;所述气隙模型对应划分所述气隙网格,所述永磁体模型、所述硅钢片模型、所述定子齿模型、所述定子槽模型和所述转轴模型分别对应划分所述部件网格。
7、所述手工划分网格还包括仿真重叠区域网格和/或仿真过渡区域网格。
8、还包括联动关系建立步骤,即根据磁位降和/或磁导率的不同,分别建立各所述部件网格与所述气隙网格之间的联动关系,所述仿真重叠区域网格与所述气隙网格之间的联动关系,以及所述仿真过渡区域网格与所述气隙网格之间的联动关系;所述联动关系使得,当因为仿真不收敛而需要调整所述气隙网格的密度时,各所述部件网格、所述仿真重叠区域网格和所述仿真过渡区域网格的密度也能分别随之按预设的方式进行调整。
9、所述手工划分网格的单元网格的形状为等腰三角形。
10、所述气隙模型的网格采用沿径向方向偶数分层的方式进行设置,且网格设置最密。
11、所述气隙模型中单元网格的高为h,腰为s,底为t;
12、所述气隙的长度d和所述气隙模型中单元网格的高h的关系为:
13、
14、所述气隙模型中单元网格的边长的最大值dairgap=max(s,t),dairgap的取值范围和平均值表达式为:
15、
16、其中,max(s,t)表示所述气隙模型中单元网格的最大边长,它是s和t中较大者,n为气隙分层数,n取自然数,且为偶数。
17、所述气隙模型中单元网格的顶角为α,30°≤α≤90°。
18、所述硅钢片模型中单元网格的边长为dcore,按如下式(5)设定:
19、
20、其中,urc为硅钢片相对磁导率,ur0为空气相对磁导率。
21、所述永磁体模型中单元网格的边长为dpm,按如下式(8)设定:
22、dpm=(1~2)dairgap (8)。
23、所述定子槽模型中单元网格的边长为dslots,取值为:
24、dslots=dcore (9)。
25、所述硅钢片模型中单元网格的边长为dcore,按如下式(5)设定:
26、
27、其中,urc为硅钢片相对磁导率,ur0为空气相对磁导率;
28、所述永磁体模型中单元网格的边长为dpm,按如下式(8)设定:
29、dpm=(1~2)dairgap (8);
30、还包括交轴气隙模型的网格划分,按如下式(11)设定:
31、dpm<dair_q<dcore (11)。
32、所述转轴模型中单元网格的边长dshaft为:
33、dshaft≥4dcore (12)。
34、本发明的实施例与现有技术相比至少具有如下有益效果:
35、通过对所述仿真模型进行网格密度的手工划分,得到手工划分网格,所述手工划分网格包括部件网格和气隙网格,所述部件网格是按照各部件材料的差异进行网格密度的划分而得到,再根据所述手工划分网格计算齿槽转矩,能够解决软件的自动划分网格只能均匀加密全局网格、不能突出重点需要加密的位置,从而导致计算时间太长,及齿槽转矩计算结果不准确的问题。故,本发明的方法能够用最少的网格数达到电机齿槽转矩计算的收敛,且永磁电机齿槽转矩的计算更准确,降低了研发周期。
36、此外,本发明实施例的所述联动关系使得,当因为仿真不收敛而需要调整所述气隙网格的密度时,各所述部件网格、所述仿真重叠区域网格和所述仿真过渡区域网格的密度也能分别随之按预设的方式进行调整,如此,既可以保证统一性,又不必做重复的网格划分工作,大幅提升了仿真的效率,进一步降低了研发周期。
技术特征:
1.一种基于maxwell有限元仿真计算永磁电机齿槽转矩的方法,其特征在于,包括如下步骤:
2.如权利要求1所述的方法,其特征在于,所述仿真模型包括气隙模型、永磁体模型、硅钢片模型、定子齿模型、定子槽模型和转轴模型;
3.如权利要求1所述的方法,其特征在于,所述手工划分网格还包括仿真重叠区域网格和/或仿真过渡区域网格。
4.如权利要求3所述的方法,其特征在于,还包括联动关系建立步骤,即根据磁位降和/或磁导率的不同,分别建立各所述部件网格与所述气隙网格之间的联动关系,所述仿真重叠区域网格与所述气隙网格之间的联动关系,以及所述仿真过渡区域网格与所述气隙网格之间的联动关系;
5.如权利要求1-4任一项所述的方法,其特征在于,所述手工划分网格的单元网格的形状为等腰三角形。
6.如权利要求5所述的方法,其特征在于,所述气隙模型的网格采用沿径向方向偶数分层的方式进行设置,且网格设置最密。
7.如权利要求6所述的方法,其特征在于,所述气隙模型中单元网格的高为h,腰为s,底为t;
8.如权利要求7所述的方法,其特征在于,所述气隙模型中单元网格的顶角为α,30°≤α≤90°。
9.如权利要求8所述的方法,其特征在于,所述硅钢片模型中单元网格的边长为dcore,按如下式(5)设定:
10.如权利要求8所述的方法,其特征在于,所述永磁体模型中单元网格的边长为dpm,按如下式(8)设定:
11.如权利要求9所述的方法,其特征在于,所述定子槽模型中单元网格的边长为dslots,取值为:
12.如权利要求8所述的方法,其特征在于,所述硅钢片模型中单元网格的边长为dcore,按如下式(5)设定:
13.如权利要求12所述的方法,其特征在于,所述转轴模型中单元网格的边长dshaft为:
技术总结
本发明的实施例提供一种基于Maxwell有限元仿真计算永磁电机齿槽转矩的方法,包括如下步骤:建立永磁电机Maxwell 2D瞬态场的仿真模型;对所述仿真模型进行网格密度的手工划分,得到手工划分网格,所述手工划分网格包括部件网格和气隙网格,所述部件网格是按照各部件材料的差异进行网格密度的划分而得到;根据以上手工划分网格计算齿槽转矩。通过以上方法,能够解决软件的自动划分网格只能均匀加密全局网格、不能突出重点需要加密的位置,从而导致计算时间太长,及齿槽转矩计算结果不准确的问题。故,本发明的方法能够用最少的网格数达到电机齿槽转矩计算的收敛,且永磁电机齿槽转矩的计算更准确,降低了研发周期。
技术研发人员:夏书岳,范欣林,田刚印
受保护的技术使用者:深圳联合飞机科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!