全自动激光雷达FAC的AA设备及激光雷达组装机构的制作方法
本申请涉及机械设备,尤其涉及一种全自动激光雷达fac的aa设备及激光雷达组装机构。
背景技术:
1、激光雷达除了激光测距技术外,还发展出了激光跟踪、激光测速、激光扫描成像、激光多普勒成像等多种技术,被广泛应用于机器人、无人驾驶、无人机、vr/ar、智慧交通、海洋探索、3d打印等领域。如在机器人,无人驾驶,无人机等领域,激光雷达可以辅助感应周围环境,实现自主建图,路径规划、自主避障等功能。为提高激光雷达的使用范围,需要对激光雷达内的各个光学元件的位置进行装配定位,如需要将fac(准直径)装配在激光雷达组件上,然而,现有产品在装配时大多通过简单的测量及定位后,就将fac胶黏在激光雷达组件上,最终形成的激光雷达产品成像精度较差,合格率较低。
技术实现思路
1、为了解决激光雷达组件与fac装配精度低、成像精度较差的技术问题,本申请的主要目的在于,提供一种能精准调整激光雷达组件与fac的装配位置、装配精度高且成像精度高的一种全自动激光雷达fac的aa设备及激光雷达组装机构。
2、为实现上述实用新型目的,本申请采用如下技术方案:
3、根据本申请的一个方面,提供了一种全自动激光雷达fac的aa设备,包括:
4、第一位置调节机构,设置有第一固定位,激光雷达设置于所述第一固定位;
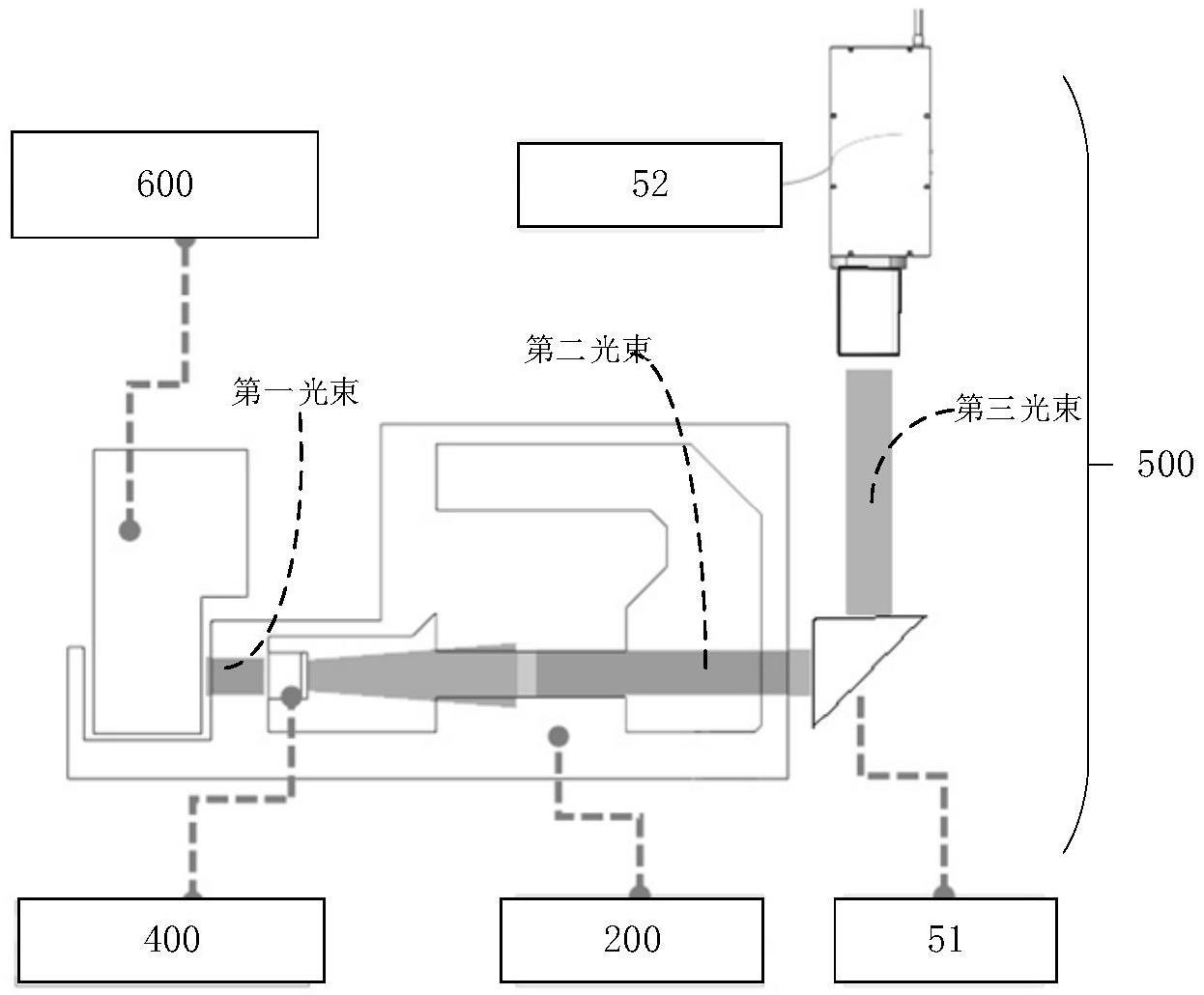
5、光源发射器,所述光源发射器用于发射沿第一路径传播的第一光束;
6、第二位置调节机构,设置有第二固定位,fac设置于所述第二固定位,所述第二位置调节机构用于调整所述fac相对所述激光雷达的位置,以使所述第一光束经过所述fac后传递至激光雷达,形成沿第二路径传播的第二光束;
7、成像检测机构,用于接收所述第二光束,所述成像检测机构用于检测所述第二光束的成像位置。
8、根据本申请的一实施方式,其中所述成像检测机构包括反射棱镜以及图像采集装置,所述第二光束经过所述反射棱镜后形成沿第二路径传递的第三光束,所述图像采集装置用于接收所述第三光束的成像位置。
9、根据本申请的一实施方式,其中所述第二光束与所述第三光束之间具有第一夹角,所述第一夹角的角度为90°。
10、根据本申请的一实施方式,其中所述图像采集装置为激光缩距仪。
11、根据本申请的一实施方式,其中所述第一位置调节机构还包括第三固定位,所述光源发射器设置于第三固定位,沿光源发射器发出第一光束的传播方向,依次经过所述第二固定位、所述第一固定位及所述反射棱镜。
12、根据本申请的一实施方式,其中所述第一位置调节机构包括第一三坐标调节机构,所述第一固定位设置于所述第一三坐标调节机构上,所述第一三坐标调节机构用于调整所述第一固定位在x轴、y轴以及z轴上的位置。
13、根据本申请的一实施方式,其中所述第二位置调节机构包括第二三坐标调节机构以及角度调节机构,所述角度调节机构设置于所述第二三坐标调节机构上,所述第二固定位设置于所述角度调节机构上,所述第二三坐标调节机构用于调整所述角度调节机构在x轴、y轴以及z轴上的位置,所述角度调节机构用于调整所述第二固定位相对所述x轴、y轴以及z轴的倾斜角度,其中,所述第一三坐标调节机构与所述第二三坐标调节机构共用一个三坐标系。
14、根据本申请的一实施方式,其中还包括:
15、控制器,所述控制器与所述第一位置调节机构及所述第二位置调节机构及所述成像检测机构电连接,以控制所述第一位置调节机构、第二位置调节机构及所述成像检测机构的启停状态;
16、处理器,所述处理器与所述控制器电连接,所述处理器用于接收所述成像检测机构获取的成像位置信号,所述处理器用于对所述成像位置信号进行判断处理,以使通过所述控制器调整所述第一位置调节机构、第二位置调节机构及所述成像检测机构的启停状态。
17、根据本申请的另一方面,提供了一种激光雷达组装机构,包括所述的全自动激光雷达fac的aa设备。
18、根据本申请的一实施方式,其中还包括控制组件及点胶机构,所述点胶机构与所述控制器组件连接,所述点胶机构用于将所述fac装配于所述激光雷达上。
19、由上述技术方案可知,本申请的一种全自动激光雷达fac的aa设备及激光雷达组装机构的优点和积极效果在于:
20、全自动激光雷达fac的aa设备包括第一位置调节机构、第二位置调节机构以及成像检测机构,通过第一位置调节机构对激光雷达进行位置的固定及调整,通过第二位置调节组件对fac相对激光雷达的位置进行调整,通过形成的第二光束后,通过成像检测机构对第二光束成像位置进行检测,当满足预设位置后,进行之后的装配,若不满足预设位置,则通过第一位置调节机构或第二位置调节机构对激光雷达与fac之间的位置进行调整,直至满足预设位置为止。与现有技术相比,可有效提高激光雷达与fac之间的位置精度,以提高后续装配进度,提高产品的合格率。
技术特征:
1.一种全自动激光雷达fac的aa设备,其特征在于,包括:
2.如权利要求1所述的全自动激光雷达fac的aa设备,其特征在于,所述成像检测机构(500)包括反射棱镜(51)以及图像采集装置(52),所述第二光束经过所述反射棱镜(51)后形成沿第二路径传递的第三光束,所述图像采集装置(52)用于接收所述第三光束的成像位置。
3.如权利要求2所述的全自动激光雷达fac的aa设备,其特征在于,所述第二光束与所述第三光束之间具有第一夹角,所述第一夹角的角度为90°。
4.如权利要求2所述的全自动激光雷达fac的aa设备,其特征在于,所述图像采集装置(52)为激光缩距仪。
5.如权利要求2所述的全自动激光雷达fac的aa设备,其特征在于,所述第一位置调节机构(100)还包括第三工作位,所述光源发射器(600)设置于第三固定位(12),沿光源发射器(600)发出第一光束的传播方向,依次经过所述第二固定位(31)、所述第一固定位(11)及所述反射棱镜(51)。
6.如权利要求1所述的全自动激光雷达fac的aa设备,其特征在于,所述第一位置调节机构(100)包括第一三坐标调节机构(13),所述第一固定位(11)设置于所述第一三坐标调节机构(13)上,所述第一三坐标调节机构(13)用于调整所述第一固定位(11)在x轴、y轴以及z轴上的位置。
7.如权利要求6所述的全自动激光雷达fac的aa设备,其特征在于,所述第二位置调节机构(300)包括第二三坐标调节机构(32)以及角度调节机构(33),所述角度调节机构(33)设置于所述第二三坐标调节机构(32)上,所述第二固定位(31)设置于所述角度调节机构(33)上,所述第二三坐标调节机构(32)用于调整所述角度调节机构(33)在x轴、y轴以及z轴上的位置,所述角度调节机构(33)用于调整所述第二固定位(31)相对所述x轴、y轴以及z轴的倾斜角度,其中,所述第一三坐标调节机构(13)与所述第二三坐标调节机构(32)共用一个三坐标系。
8.如权利要求1所述的全自动激光雷达fac的aa设备,其特征在于,还包括:
9.一种激光雷达组装机构,其特征在于,包括权利要求1-8任一项所述的全自动激光雷达fac的aa设备。
10.如权利要求9所述的激光雷达组装机构,其特征在于,还包括控制组件及点胶机构(700),所述点胶机构(700)与所述控制组件电连接,所述点胶机构(700)用于将fac(400)装配于所述激光雷达(200)上。
技术总结
本申请涉及机械设备技术领域,本申请公开一种全自动激光雷达FAC的AA设备及激光雷达组装机构。其中,全自动激光雷达FAC的AA设备包括第一位置调节机构、第二位置调节机构以及成像检测机构,通过第一位置调节机构对激光雷达进行位置的固定及调整,通过第二位置调节组件对FAC相对激光雷达的位置进行调整,通过形成的第二光束后,通过成像检测机构对第二光束成像位置进行检测,当满足预设位置后,进行之后的装配,若不满足预设位置,则通过第一位置调节机构或第二位置调节机构对激光雷达与FAC之间的位置进行调整,直至满足预设位置为止。与现有技术相比,可有效提高激光雷达与FAC之间的位置精度,以提高后续装配进度,提高产品的合格率。
技术研发人员:曹光辉,刘建辉,杨军,蒋端元,黄辉,易佳朋
受保护的技术使用者:深圳中科精工科技有限公司
技术研发日:20230328
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!