一种伺服电机制动器的闭环检测结构的制作方法
本技术涉及一种检测结构,尤其涉及一种伺服电机制动器的闭环检测结构。
背景技术:
1、伺服电机制动器,又称抱闸、刹车器,是一种被现代工业广泛应用的自动化执行元件。
2、伺服电机制动器一般安装在电机后端,主要用于设备断电后锁定电机的轴来达到令电机不能自由旋转的作用。伺服电机制动器一般用于设备垂直伺服电机轴上面,防止设备突然断电时垂直负载由于重力作用带动电机旋转下滑,从而产生危险。同时,在agv行业,为了避免agv停于坡面并断电时不受控下滑的情况,因此通常重载型agv也会为电机配置制动器,从而保证设备的安全。
3、伺服电机制动器,其构造一般是以弹簧将刹车片压住,利用其摩擦力来产生制动扭力的装置。当伺服电机制动器的线圈通电时,由于励磁铁心吸引的作用将弹簧加以压缩,制动器就呈释放状态,此时电机可以正常转动。当控制器切断电机制动器的线圈的电流时,由于励磁铁芯失去吸引力,刹车片脱离制动盘,此时制动盘与刹车片及电机之间生产摩擦力矩,从而抱死电机转动轴不让其转动。
4、在实际应用中,为了在任何情况下伺服电机都保持锁定不能转动的状态,对于带有制动器的伺服电机,电机使能(电机加电后处于锁轴的状态)和制动器制动抱紧是处于互锁状态。即当电机使能锁轴后,驱动器控制电机制动器释放,此时驱动器可以控制电机正常转动。当电机释放时,驱动器控制电机制动器处于抱紧状态,此时电机不会因为失去控制而处于自由状态,以保证设备的安全。
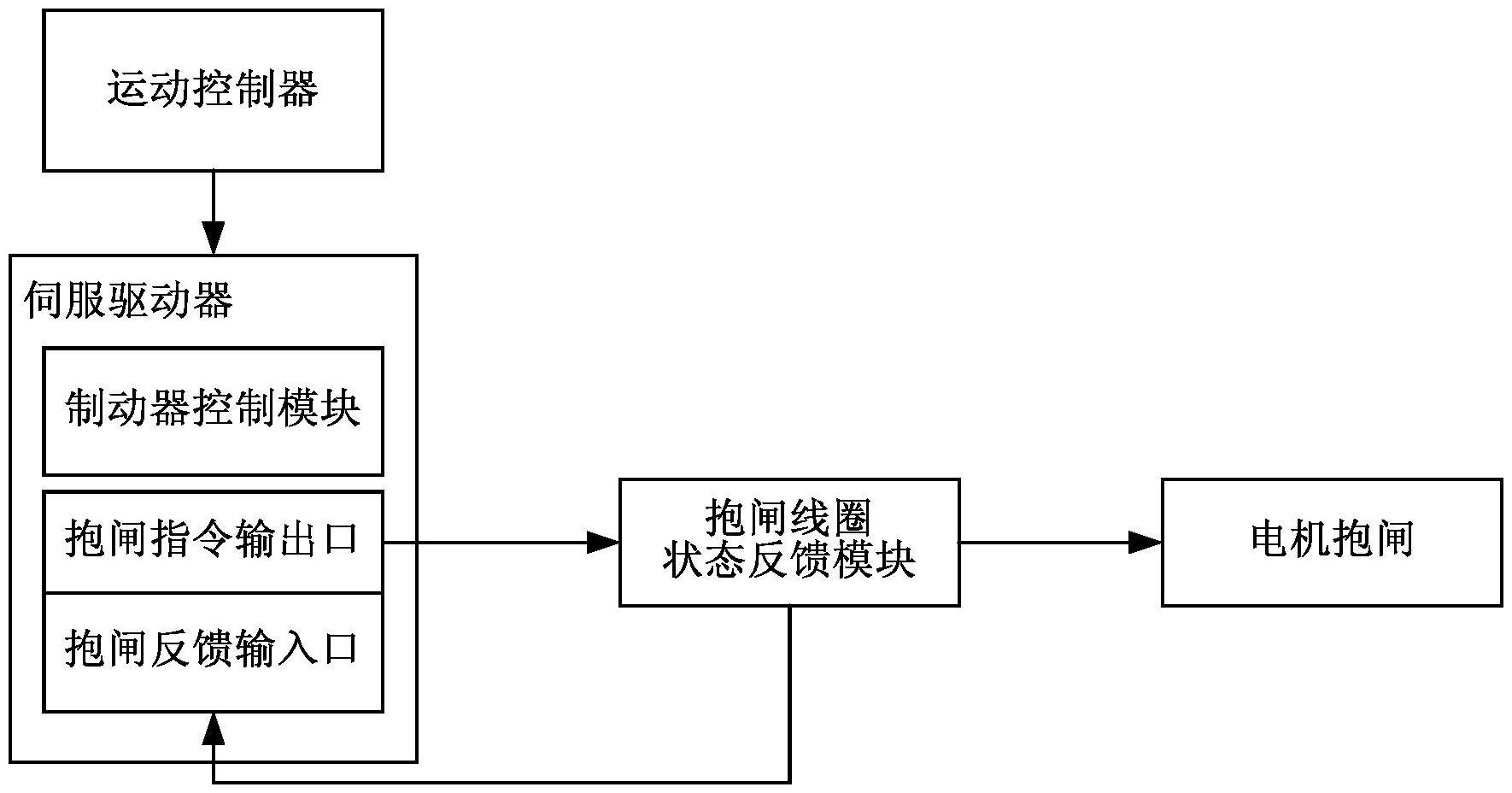
5、图1所示为现有技术中的运动控制器、伺服驱动器和伺服电机以及制动器的连接方式。其中,伺服驱动器接收运动控制器发送来的控制指令,进而伺服驱动器再对伺服电机和制动器进行控制。制动器的动作通常是由伺服驱动器中的制动器控制单元进行控制。
6、如前所述,对于带制动器的伺服电机,其制动器的动作和电机的锁轴动作通常处于互锁状态,以保证设备的安全。同时,为了保证伺服电机制动器的工作寿命和性能,通常不会在伺服电机运动的时候强制将制动器处于抱紧状态。因为在制动器锁紧的时候如果强制让电机运动,制动器的刹车片会处于打滑摩擦状态,这种摩擦时间长了会造成刹车片的磨损,从而影响制动器的性能,最终导致制动器损坏。
7、但是,在控制逻辑正常的情况下,有可能发生伺服驱动器认为制动器已经动作,而制动器事实上并没有按照指令执行动作,此时就有可能导致在制动器没有释放的情况下,伺服驱动器控制伺服电机强行转动的故障。此时的运动将对制动器造成不利的影响,甚至会造成制动器的损坏,引起经济损失,并会对之后的正常控制逻辑造成影响。
技术实现思路
1、本实用新型针对现有技术的弊端,提供一种伺服电机制动器的闭环检测结构。
2、本实用新型所述的伺服电机制动器的闭环检测结构,包括伺服驱动器、制动器控制模块、和被所述制动器控制模块对应控制的电机抱闸,所述制动器控制模块通过伺服驱动器的抱闸指令输出口向所述电机抱闸输出抱闸状态控制指令,还包括串接设置于所述抱闸指令输出口与所述电机抱闸的抱闸线圈之间的抱闸线圈状态反馈模块;
3、所述抱闸线圈状态反馈模块的输出端连接至所述伺服驱动器的抱闸反馈输入口,并将采集到的所述抱闸线圈的通断状态信息通过所述抱闸反馈输入口反馈至所述伺服驱动器;
4、所述伺服驱动器根据所述抱闸指令输出口输出的所述抱闸状态控制指令和所述抱闸反馈输入口接收到的所述抱闸线圈的通断状态信息确定所述电机抱闸的反馈状态信息。
5、本实用新型所述的伺服电机制动器的闭环检测结构中,所述抱闸指令输出口包括正极电源输出口和负极电源输出口,自所述正极电源输出口引出的正极线和自所述负极电源输出口引出的负极线分别接入所述抱闸线圈的两接线端;
6、所述抱闸线圈状态反馈模块包括电流采样电阻和运放电路;
7、其中,所述电流采样电阻串接于所述正极线,所述运放电路将所述电流采样电阻两端的电压差信号放大后输出至所述抱闸反馈输入口。
8、本实用新型所述的伺服电机制动器的闭环检测结构中,所述正极线与所述负极线之间设置有第一发光二极管。
9、本实用新型所述的伺服电机制动器的闭环检测结构中,所述运放电路的输出端与所述抱闸反馈输入口之间设置有第二发光二极管。
10、本实用新型所述的伺服电机制动器的闭环检测结构中,通过在所述抱闸指令输出口与所述电机抱闸的抱闸线圈之间串接设置所述抱闸线圈状态反馈模块,从而将抱闸的状态实时反馈给所述伺服驱动器,以监视所述电机抱闸是否真实抱闸或者释放,从而形成所述伺服驱动器与所述电机抱闸的抱闸线圈之间抱闸闭环控制与状态监测的功能,避免由于抱闸没有释放时所述伺服驱动器强行带动电机运行的情况出现,从而避免制动器损坏和系统不能正常工作的故障发生。
技术特征:
1.一种伺服电机制动器的闭环检测结构,包括伺服驱动器、制动器控制模块、和被所述制动器控制模块对应控制的电机抱闸,所述制动器控制模块通过伺服驱动器的抱闸指令输出口向所述电机抱闸输出抱闸状态控制指令,其特征在于,还包括串接设置于所述抱闸指令输出口与所述电机抱闸的抱闸线圈之间的抱闸线圈状态反馈模块;
2.如权利要求1所述的伺服电机制动器的闭环检测结构,其特征在于,所述抱闸指令输出口包括正极电源输出口和负极电源输出口,自所述正极电源输出口引出的正极线和自所述负极电源输出口引出的负极线分别接入所述抱闸线圈的两接线端;
3.如权利要求2所述的伺服电机制动器的闭环检测结构,其特征在于,所述正极线与所述负极线之间设置有第一发光二极管。
4.如权利要求2所述的伺服电机制动器的闭环检测结构,其特征在于,所述运放电路的输出端与所述抱闸反馈输入口之间设置有第二发光二极管。
技术总结
本技术公开了一种伺服电机制动器的闭环检测结构,包括伺服驱动器、制动器控制模块、和被所述制动器控制模块对应控制的电机抱闸,所述制动器控制模块通过伺服驱动器的抱闸指令输出口向所述电机抱闸输出抱闸状态控制指令,还包括串接设置于所述抱闸指令输出口与所述电机抱闸的抱闸线圈之间的抱闸线圈状态反馈模块;所述抱闸线圈状态反馈模块的输出端连接至所述伺服驱动器的抱闸反馈输入口,并将采集到的所述抱闸线圈的通断状态信息通过所述抱闸反馈输入口反馈至所述伺服驱动器;所述伺服驱动器根据所述抱闸指令输出口输出的所述抱闸状态控制指令和所述抱闸反馈输入口接收到的所述抱闸线圈的通断状态信息确定所述电机抱闸的反馈状态信息。
技术研发人员:邵晓寅
受保护的技术使用者:北京诺信泰伺服科技有限公司
技术研发日:20230510
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!