病理检验样本预处理装置
本技术涉及样本处理,具体为病理检验样本预处理装置。
背景技术:
1、本部分的陈述仅仅是提供了与本实用新型相关的背景技术信息,不必然构成在先技术。
2、病理组织需要经过前处理(预处理)才能制作成用于检测的样本,目前依靠人工操作,对采集的病理组织进行整形、固定、染色、混合以及切片等处理。例如在组织离体后,采用某些方法使细胞内的物质尽可能接近其生活状态时的形态、结构和位置,防止组织内细胞自溶和腐败,从而保证后续的染色效果满足检验需求。通过将病理组织转移到带有特定成分试剂的容器中浸润,使组织内的细胞固定。
3、这一操作中,需要人工进行容器开盖、样本组织转移、容器关盖以及振荡混合等动作,每一个环节中的人为失误都容易造成样本损毁或是标记错误。
4、如果采用机器人等装置代替人工,虽然可以通过图像识别的方式完成物品转移的过程,但带有试剂的容器往往是带有盖子的,而机器人通常需要先将容器固定在某个位置后,再实现开盖和关盖,最后将容器从固定位置取出,转移到下一个预设位置。机器人作业期间需要复杂的算法识别容器和盖子,并且还需要复杂的机械结构作为支持。
技术实现思路
1、为了解决上述背景技术中存在的技术问题,本实用新型提供病理检验样本预处理装置,利用两组机械臂分别执行不同的动作,完成开盖、倾倒、震荡混合以及放置保存的病理组织样本转移过程,减少部分人工作业,从而避免人为因素带来的失误;并且其中一个负责夹持瓶盖的机械臂配备跟随夹爪转动的图像采集模块,有利于标定过程。
2、为了实现上述目的,本实用新型采用如下技术方案:
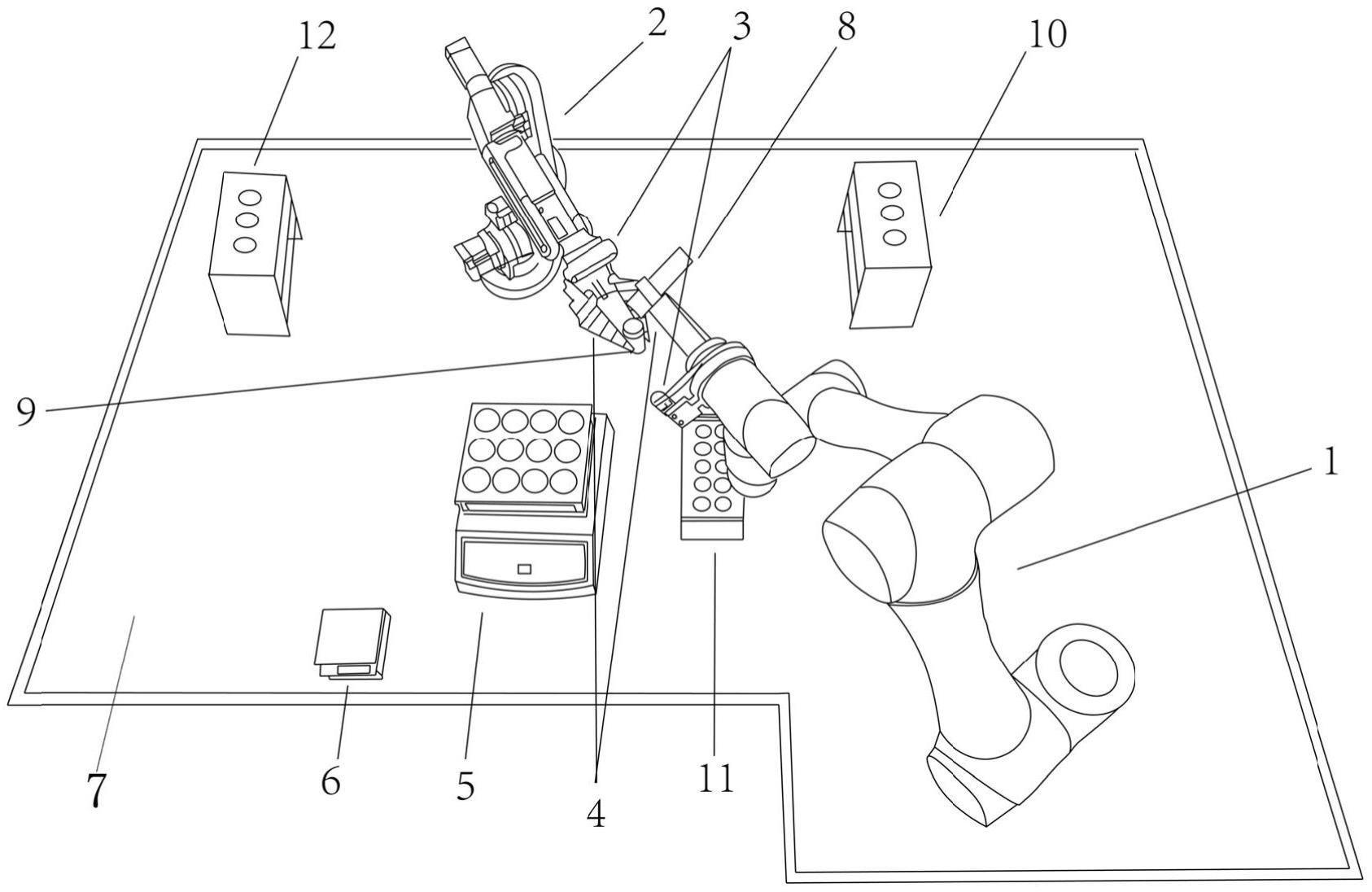
3、本实用新型提供病理检验样本预处理装置,包括设置在基础板上的第一机械臂和第二机械臂,两机械臂上均设有夹爪和图像采集模块,图像采集模块跟随夹爪旋转,基础板上设有采集试管放置区、振荡试管放置区、振荡混合放置区、振荡器和plc控制模块,两机械臂和对应的图像采集模块以及振荡器分别与plc控制模块通讯连接。
4、采集试管放置区用于放置样本试管,振荡试管放置区用于放置混合振荡试管,振荡混合放置区用于放置振荡混合处理后的试管。
5、试管放置区位于第一机械臂的工作范围内。
6、振荡试管放置区、振荡混合放置区和振荡器位于第二机械臂的工作范围内。
7、样本试管为保存病理组织样本的试管,混合振荡试管为保存混合介质的试管。
8、振荡器上设有多个用于容纳试管的凹槽,每个凹槽底部均设有定位标签。
9、两机械臂均为多关节机械臂,每个关节上均设有角度传感器,角度传感器获取的角度信息和相邻两个关节之间的臂长形成机械臂的位姿信息。
10、夹爪位于机械臂末端,夹爪上设有力反馈传感器,用于获取夹持试管时的应力信息。
11、第一机械臂的夹爪尖端设有成对布置的凹槽。
12、图像采集模块具有至少两组,图像采集模块设在机械臂的夹爪根部跟随夹爪旋转,获取夹爪工作端所在方向的图像信息并发送给pl c控制模块。
13、基础板上方设定的高度位置上设有第三组图像采集模块。
14、与现有技术相比,以上一个或多个技术方案存在以下有益效果:
15、1、两组机械臂分别执行不同的动作,完成开盖、组织转移、关盖、震荡混合以及放置保存的动作,使得病理组织样本预处理过程中的固定步骤能够通过机械臂之间的相互配合完成,减少部分人工作业,从而避免人为因素带来的失误。
16、2、图像采集模块跟随夹爪转动,始终获取夹爪的工作画面,简化标定的过程,有利于夹持小体积的试管盖。
17、3、第一机械臂的尖爪尖端通过凹槽提高与试管盖的接触面积,确保试管盖开启和关闭的动作能够稳定运行。
18、4、通过基础板上方的图像采集模块避免两机械臂在工作空间与与周围人或物体发生碰撞。
技术特征:
1.病理检验样本预处理装置,其特征在于,包括设置在基础板上的第一机械臂和第二机械臂,两机械臂上均设有夹爪和图像采集模块,图像采集模块跟随夹爪旋转,基础板上设有采集试管放置区、振荡试管放置区、振荡混合放置区、振荡器和plc控制模块,两机械臂和对应的图像采集模块以及振荡器分别与plc控制模块通讯连接。
2.如权利要求1所述的病理检验样本预处理装置,其特征在于,所述采集试管放置区用于放置样本试管,振荡试管放置区用于放置混合振荡试管,振荡混合放置区用于放置振荡混合处理后的试管。
3.如权利要求2所述的病理检验样本预处理装置,其特征在于,所述试管放置区位于第一机械臂的工作范围内。
4.如权利要求2所述的病理检验样本预处理装置,其特征在于,所述振荡试管放置区、振荡混合放置区和振荡器位于第二机械臂的工作范围内。
5.如权利要求1所述的病理检验样本预处理装置,其特征在于,所述振荡器上设有多个用于容纳试管的凹槽,每个凹槽底部均设有定位标签。
6.如权利要求1所述的病理检验样本预处理装置,其特征在于,所述机械臂为多关节机械臂,每个关节上均设有角度传感器,角度传感器获取的角度信息和相邻两个关节之间的臂长形成机械臂的位姿信息。
7.如权利要求1所述的病理检验样本预处理装置,其特征在于,所述夹爪位于机械臂末端,夹爪上设有力反馈传感器,用于获取夹持试管时的应力。
8.如权利要求1所述的病理检验样本预处理装置,其特征在于,第一机械臂的夹爪尖端设有成对布置的凹槽。
9.如权利要求1所述的病理检验样本预处理装置,其特征在于,所述图像采集模块具有至少两组,图像采集模块设在两机械臂的夹爪根部跟随夹爪旋转,获取夹爪工作端所在方向的图像信息并发送给plc控制模块。
10.如权利要求9所述的病理检验样本预处理装置,其特征在于,所述基础板上方设定的高度位置上设有第三组图像采集模块。
技术总结
本技术涉及病理检验样本预处理装置,包括设置在基础板上的第一机械臂和第二机械臂,两机械臂上均设有夹爪和图像采集模块,图像采集模块跟随夹爪旋转,基础板上设有采集试管放置区、振荡试管放置区、振荡混合放置区、振荡器和PLC控制模块,两机械臂和对应的图像采集模块以及振荡器分别与PLC控制模块通讯连接。利用两组机械臂之间的相互协作配合,完成开盖、倾倒、震荡混合以及放置保存的病理组织样本预处理过程,减少部分人工作业,从而避免人为因素带来的失误。
技术研发人员:张焜,杨壹然,刘凯月,张玉瑾,冯超
受保护的技术使用者:齐鲁工业大学(山东省科学院)
技术研发日:20230529
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!