一种适用于腿足机器人自主导航与避障的环境感知装置
本技术属于机器人环境感知装置,特别是一种适用于腿足机器人自主导航与避障的环境感知装置。
背景技术:
1、本部分的陈述仅仅是提供了与本实用新型相关的背景技术信息,不必然构成在先技术。
2、环境感知能力是腿足机器人实现自主导航与避障的基础,通常环境感知能力是通过传感器实现的,常见的机载传感器包括激光雷达、摄像头等。环境感知模块作为机器人实现环境感知功能的载体,应具备环境感知、数据处理以及信息传输的功能,将获取的环境信息经过处理后发送给机器人。目前具备环境感知能力的腿足机器人通过在机身外部搭载传感器获取环境信息,并在机身内部完成数据信息的处理和传输,从而实现环境感知、数据处理与信息传输。但上述情况下的硬件设备布局分散,集成度低,具有较低的可移植性和应用灵活性。
技术实现思路
1、本实用新型的目的在于提供一种适用于腿足机器人自主导航与避障的环境感知装置,通过将各硬件设备集成为一体,在保证功能稳定的基础上实现硬件设备模块化,并根据各硬件设备的尺寸将模块体积最小化,提高环境感知模块的可移植性和应用灵活性,体积小、集成度高、可移植性强、应用灵活,以解决现有技术中的问题。
2、为解决上述技术问题,本实用新型是通过以下技术方案实现的:
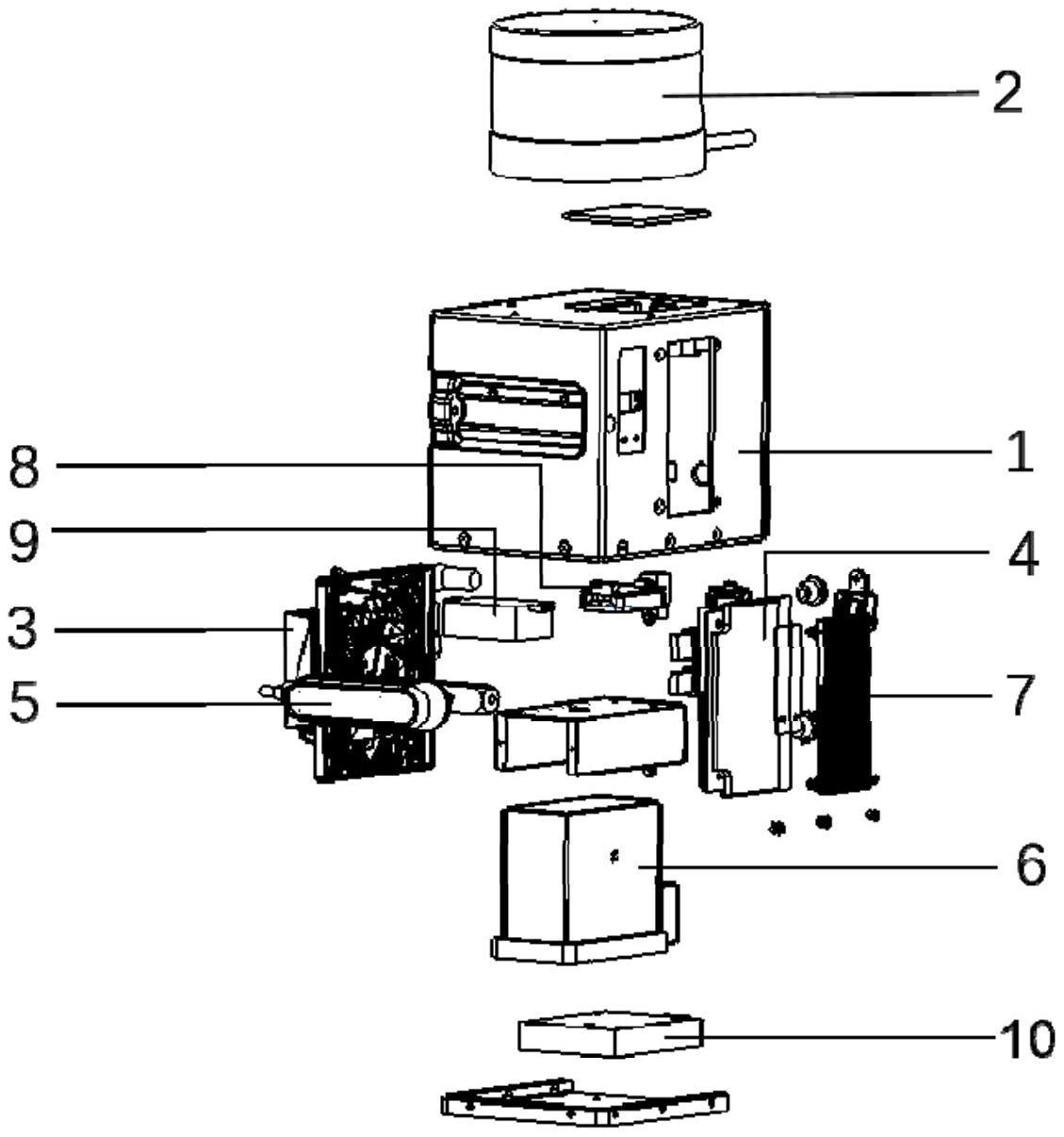
3、本实用新型为一种适用于腿足机器人自主导航与避障的环境感知装置,包括组装壳体,所述组装壳体相对的两个内壁上分别设置有一号容纳空间和二号容纳空间,所述一号容纳空间和二号容纳空间内分别设置有工控机和路由器,所述组装壳体内侧顶部设置有三号容纳空间,所述三号容纳空间内设置有变压器和惯性测量单元,所述组装壳体内侧底部设置有激光雷达驱动板和电池,所述组装壳体顶部设置有激光雷达传感器。
4、优选的,所述组装壳体靠近路由器和工控机的相对的两个侧壁上分别设置有散热板。
5、优选的,所述组装壳体远离工控机和路由器的侧壁上设置有双目深度相机。
6、优选的,所述电池分别与工控机、激光雷达传感器、激光雷达驱动板、双目深度相机、惯性测量单元相连接。
7、优选的,所述电池与变压器的输入端相连接,所述变压器的输出端与路由器相连接。
8、优选的,所述工控机分别与双目深度相机、惯性测量单元、激光雷达传感器通信连接。
9、优选的,路由器与激光雷达传感器和工控机分别通过网线通信连接。
10、优选的,所述组装壳体整体形状为方形,所述组装壳体包括四个侧壁、顶壁和底壁,组装壳体相邻的侧壁、顶壁和底壁之间均通过螺钉固定。
11、优选的,所述电池的输出电压为12v。
12、优选的,所述变压器为12v转5v的变压器。
13、本实用新型具有以下有益效果:
14、1、本实用新型针对目前腿足机器人的环境感知设备布局分散、模块化程度弱的问题,提供了一种适用于腿足机器人自主导航与避障的环境感知装置,通过将各硬件设备集成为一体,在保证功能稳定的基础上实现了硬件设备的模块化,并根据各硬件设备的尺寸将模块体积最小化,提高环境感知模块的可移植性和应用灵活性,可以在多种载体平台上应用,在腿足机器人平台上具有体积小、集成度高、可移植性强、应用灵活的优点。
15、2、本实用新型的激光雷达传感器和双目深度相机安装在自主设计的组装壳体的上方和前方,用于进行环境感知;将工控机、路由器、电池、变压器以及激光雷达驱动板按照自主设计组装壳体的内部布局进行安装,为保证工控机和路由器的散热情况,将工控机和路由器分别安装在组装壳体的左侧和右侧,将中间的较大空间用于安装并固定电池;在组装壳体内部的上方留有部分空间,用于安装变压器模块和imu;在组装壳体内部的底部的空余空间用于安装激光雷达驱动板,考虑了每个硬件的功能和连接关系、位置关系,设计了一款最优的集成程度高的组装壳体,使得装置整体布局合理、科学。
16、当然,实施本实用新型的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种适用于腿足机器人自主导航与避障的环境感知装置,其特征在于,包括组装壳体,所述组装壳体相对的两个内壁上分别设置有一号容纳空间和二号容纳空间,所述一号容纳空间和二号容纳空间内分别设置有工控机和路由器,所述组装壳体内侧顶部设置有三号容纳空间,所述三号容纳空间内设置有变压器和惯性测量单元,所述组装壳体内侧底部设置有激光雷达驱动板和电池,所述组装壳体顶部设置有激光雷达传感器。
2.根据权利要求1所述的适用于腿足机器人自主导航与避障的环境感知装置,其特征在于,所述组装壳体靠近路由器和工控机的相对的两个侧壁上分别设置有散热板。
3.根据权利要求1所述的适用于腿足机器人自主导航与避障的环境感知装置,其特征在于,所述组装壳体远离工控机和路由器的侧壁上设置有双目深度相机。
4.根据权利要求1所述的适用于腿足机器人自主导航与避障的环境感知装置,其特征在于,所述电池分别与工控机、激光雷达传感器、激光雷达驱动板、双目深度相机、惯性测量单元相连接。
5.根据权利要求1所述的适用于腿足机器人自主导航与避障的环境感知装置,其特征在于,所述电池与变压器的输入端相连接,所述变压器的输出端与路由器相连接。
6.根据权利要求1所述的适用于腿足机器人自主导航与避障的环境感知装置,其特征在于,所述工控机分别与双目深度相机、惯性测量单元、激光雷达传感器通信连接。
7.根据权利要求1所述的适用于腿足机器人自主导航与避障的环境感知装置,其特征在于,路由器与激光雷达传感器和工控机分别通过网线通信连接。
8.根据权利要求1所述的适用于腿足机器人自主导航与避障的环境感知装置,其特征在于,所述组装壳体整体形状为方形,所述组装壳体包括四个侧壁、顶壁和底壁,组装壳体相邻的侧壁、顶壁和底壁之间均通过螺钉固定。
9.根据权利要求1所述的适用于腿足机器人自主导航与避障的环境感知装置,其特征在于,所述电池的输出电压为12v。
10.根据权利要求1所述的适用于腿足机器人自主导航与避障的环境感知装置,其特征在于,所述变压器为12v转5v的变压器。
技术总结
本技术公开一种适用于腿足机器人自主导航与避障的环境感知装置,涉及机器人环境感知装置技术领域。包括组装壳体,组装壳体相对的两个内壁上分别设置有一号容纳空间和二号容纳空间,一号容纳空间和二号容纳空间内分别设置有工控机和路由器,组装壳体内侧顶部设置有三号容纳空间,三号容纳空间内设置有变压器和惯性测量单元,组装壳体内侧底部设置有激光雷达驱动板和电池,组装壳体顶部设置有激光雷达传感器。本技术通过将各硬件设备集成为一体,在保证功能稳定的基础上实现硬件设备模块化,并根据各硬件设备的尺寸将模块体积最小化,提高环境感知模块的可移植性和应用灵活性,体积小、集成度高、可移植性强、应用灵活。
技术研发人员:靳弘敏,张润东,赵荣华,雒瑞民,刘大宇,范永
受保护的技术使用者:山东交通学院
技术研发日:20230606
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!