一种基于单相机配合机械手的对位贴合的检测装置的制作方法
本技术涉及检测装置,具体为一种基于单相机配合机械手的对位贴合的检测装置。
背景技术:
1、显示模组产品生产中离不开贴合设备,相应的贴合工艺离不开对位过程。随着贴合产品的多样化,种类越来越多,对贴合对位的要求也越来越高,传统的定位是靠机械限位的方式进行对位贴合,或者大视野定位是双对位贴合相机拍照的方式进行对位贴合,这样前者效率低、对位精度差,后者成本高。如申请号cn202020782125.5属于单对位贴合相机高精度对位贴合设备技术领域,具体公开了一种基于单相机配合机械手的大视野高精度对位贴合设备,包括对位贴合相机、abb机器人、对位贴合光源、对位贴合镜头和视觉处理设备,机械手上夹持有对位贴合相机,对位贴合相机上安装有对位贴合镜头,对位贴合镜头上固定有固定环,固定环的两侧铰接有电动推杆,电动推杆的底端固定有对位贴合光源;电动推杆的两侧固定有连接轴,连接轴的一端铰接有“t”型滑块,“t”型滑块与“t”型导轨滑动连接;所述abb机器人与视觉处理设备建立信息传输连接;所述对位贴合相机与视觉处理设备建立信息传递。
2、类似于上述一种基于单相机配合机械手的大视野高精度对位贴合设备目前还存在以下不足:上述装置对位贴合相机在使用时,可以根据四周环境的光亮程度,提高电动推杆带动弧形发光二极管沿着“t”型导轨运动,从而改变对位贴合光源与待检测货物之间的距离,从而起到调节光照强度的功能;增大上述对位贴合相机的使用范围进而增大上述装置的使用范围,但是上述装置虽然可以改变对位贴合光源与待检测货物之间的距离,但是无法判断贴合光源与待检测货物之间的具体距离,当对位贴合部位不易照射对位贴合点时,从而需要相机和贴合光源进行微调,以便于找到最佳拍摄点,浪费较长的时间,并且在进行贴合后还需要进一步检测物体之间贴合是否完整。
3、于是,有鉴于此,针对现有的结构及缺失予以研究改良,提出一种基于单相机配合机械手的对位贴合的检测装置,以达到更具有实用价值的目的。
技术实现思路
1、本实用新型的目的在于提供一种基于单相机配合机械手的对位贴合的检测装置,以解决上述背景技术中提出减少与待检测货物贴合时间的问题。
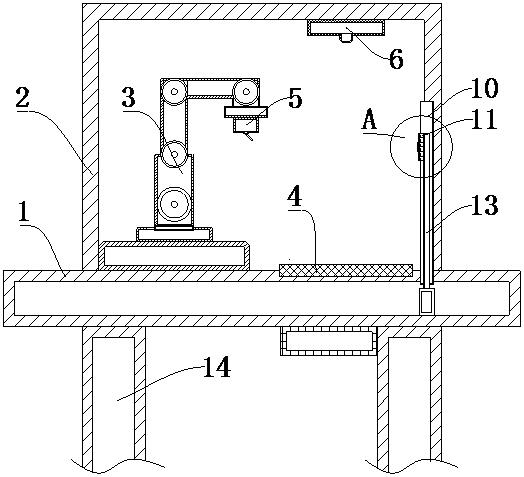
2、为实现上述目的,本实用新型提供如下技术方案:一种基于单相机配合机械手的对位贴合的检测装置,包括机架,所述机架的上端面安装有保护罩,且保护罩内腔的底部设置有机器臂,所述机器臂的一侧设置有输送带,所述机器臂的末端设置有对位贴合相机,所述输送带的正上方设置有超声波位置传感器,所述对位贴合相机的底端面设置有第一镜头,且第一镜头与对位贴合相机之间呈四十五度夹角,所述对位贴合相机与机器臂的连接处设置有视觉处理设备,所述保护罩内腔的侧壁设置有滑槽,且滑槽的内部卡合连接有滑块,所述滑块的一侧设置有第二镜头,且滑块远离第二镜头的一侧设置有电动伸缩杆,所述第一镜头与第二镜头的外径表面设置有贴合光源,所述滑块与第二镜头的接触面设置有轴承,且轴承的内径设置有微型伺服电机。
3、进一步的,所述机器臂包括底座,所述底座的上端面设置有第一转向件,且第一转向件的上端面固定连接有第一执行件,所述第一执行件的一端设置有第二执行件,且第二执行件的一端设置有第三执行件,所述第三执行件的一端设置有第四执行件,所述第一转向件、第一执行件、第二执行件、第三执行件和第四执行件的连接处均设置有转轴。
4、进一步的,所述视觉处理设备具体是一种视觉处理器,且视觉处理器由采集卡与处理器构成,所述视觉处理器包括但不限于vc视觉处理器或者nu视觉处理器中的一种或多种,所述贴合光源由若干弧形发光二极管组成,且发光二极管包括但不限于bt发光二极管或者btrg发光二极管的一种或者多种。
5、进一步的,所述第二镜头与轴承的内径表面固定连接,所述滑块与轴承的外径表面固定连接,所述微型伺服电机的输出端与轴承内径的边缘处固定连接,所述第二镜头通过轴承与滑块构成围绕滑块垂直方向旋转的旋转结构。
6、进一步的,所述第一镜头和第二镜头与所述视觉处理设备之间电性连接,且视觉处理设备与机器臂之间电性连接,所述第一转向件、第一执行件、第二执行件、第三执行件和第四执行件之间通过转轴构成围绕转轴旋转的旋转结构。
7、进一步的,所述机架的底端面设置有若干个支脚,所述机架的底端面设置控制器和供电口。
8、与现有技术相比,本实用新型的有益效果是:本产品通过超声波位置传感器感应待检测货物的位置,从而便于机器臂末端向待检测货物方向移动,同时通过第一镜头和第二镜头对待检测货物进行拍照,从而便于此装置对待检测货物贴合部位进行检测,并且减少此装置感应和移动到待检测货物贴合部位的时间,以便提高检测效率;
9、此装置通过超声波位置传感器判断出待检测货物的位置,在通过电动伸缩杆带动滑块在滑槽内进行移动,从而使第二镜头对准待检测货物的位置,并且第二镜头通过轴承与滑块构成围绕滑块垂直方向旋转的旋转结构,从而使第二镜头通过滑块和滑槽精上下移动的过程中,第二镜头与滑块之间的夹角可以通过微型伺服电机进行旋转,从而便于对待检测货物贴合部位进行检测;
10、此装置在通过超声波位置传感器判断出待检测货物的位置后,通过导线传输视觉处理设备中,并且视觉处理设备同时接收第二镜头传输的图像,从而使机器臂通过底座、第一转向件、第一执行件、第二执行件、第三执行件、第四执行件和转轴将末端的对位贴合相机移动到待检测货物的对贴位置,从而便于此装置对待检测货物贴合部位进行检测,同时第一镜头进行拍照,通过第一镜头和第二镜头传输的图像,以便更加准确的对贴合部位进行检测;
11、此装置在第一镜头和第二镜头处均设置有贴合光源,从而避免拍照时光源不足的情况发生,并且此装置不仅适用于对贴合部位进行检测,还适用于两个物体之间的贴合操作。
技术特征:
1.一种基于单相机配合机械手的对位贴合的检测装置,包括机架(1),其特征在于,所述机架(1)的上端面安装有保护罩(2),且保护罩(2)内腔的底部设置有机器臂(3),所述机器臂(3)的一侧设置有输送带(4),所述机器臂(3)的末端设置有对位贴合相机(5),所述输送带(4)的正上方设置有超声波位置传感器(6),所述对位贴合相机(5)的底端面设置有第一镜头(7),且第一镜头(7)与对位贴合相机(5)之间呈四十五度夹角,所述对位贴合相机(5)与机器臂(3)的连接处设置有视觉处理设备(9),所述保护罩(2)内腔的侧壁设置有滑槽(10),且滑槽(10)的内部卡合连接有滑块(11),所述滑块(11)的一侧设置有第二镜头(12),且滑块(11)远离第二镜头(12)的一侧设置有电动伸缩杆(13),所述第一镜头(7)与第二镜头(12)的外径表面设置有贴合光源(8),所述滑块(11)与第二镜头(12)的接触面设置有轴承,且轴承的内径设置有微型伺服电机。
2.根据权利要求1所述的一种基于单相机配合机械手的对位贴合的检测装置,其特征在于,所述机器臂(3)包括底座(301),所述底座(301)的上端面设置有第一转向件(302),且第一转向件(302)的上端面固定连接有第一执行件(303),所述第一执行件(303)的一端设置有第二执行件(304),且第二执行件(304)的一端设置有第三执行件(305),所述第三执行件(305)的一端设置有第四执行件(306),所述第一转向件(302)、第一执行件(303)、第二执行件(304)、第三执行件(305)和第四执行件(306)的连接处均设置有转轴(307)。
3.根据权利要求1所述的一种基于单相机配合机械手的对位贴合的检测装置,其特征在于,所述视觉处理设备(9)具体是一种视觉处理器,且视觉处理器由采集卡与处理器构成,所述视觉处理器包括但不限于3700vc视觉处理器或者nu4000视觉处理器中的一种或多种,所述贴合光源(8)由若干弧形发光二极管组成,且发光二极管包括但不限于bt114发光二极管或者bt3621526rg发光二极管的一种或者多种。
4.根据权利要求1所述的一种基于单相机配合机械手的对位贴合的检测装置,其特征在于,所述第二镜头(12)与轴承的内径表面固定连接,所述滑块(11)与轴承的外径表面固定连接,所述微型伺服电机的输出端与轴承内径的边缘处固定连接,所述第二镜头(12)通过轴承与滑块(11)构成围绕滑块(11)垂直方向旋转的旋转结构。
5.根据权利要求2所述的一种基于单相机配合机械手的对位贴合的检测装置,其特征在于,所述第一镜头(7)和第二镜头(12)与所述视觉处理设备(9)之间电性连接,且视觉处理设备(9)与机器臂(3)之间电性连接,所述第一转向件(302)、第一执行件(303)、第二执行件(304)、第三执行件(305)和第四执行件(306)之间通过转轴(307)构成围绕转轴(307)旋转的旋转结构。
6.根据权利要求1所述的一种基于单相机配合机械手的对位贴合的检测装置,其特征在于,所述机架(1)的底端面设置有若干个支脚(14),所述机架(1)的底端面设置控制器和供电口。
技术总结
本技术公开了一种基于单相机配合机械手的对位贴合的检测装置,包括机架,所述机架的上端面安装有保护罩,保护罩内腔的底部设置有机器臂,机器臂的末端设置有对位贴合相机,输送带的正上方设置有超声波位置传感器,对位贴合相机的底端面设置有第一镜头,保护罩内腔的侧壁设置有滑槽,滑槽的内部卡合连接有滑块,滑块的一侧设置有第二镜头。本产品通过超声波位置传感器感应待检测货物的位置,从而便于机器臂末端向待检测货物方向移动,同时通过第一镜头和第二镜头对待检测货物进行拍照,从而便于此装置对待检测货物贴合部位进行检测,并且减少此装置感应和移动到待检测货物贴合部位的时间,以便提高检测效率。
技术研发人员:赵园园
受保护的技术使用者:上海波创电气有限公司
技术研发日:20230703
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!