一种基于激光雷达的道路宽度识别系统及摊铺机的制作方法
本技术涉及道路作业,尤其涉及一种基于激光雷达的道路宽度识别系统及摊铺机。
背景技术:
1、路面在进行摊铺时,需要采用摊铺机作业。摊铺机在作业过程中,在速度上需要保持恒定,不能过快,防止出现摊铺上的遗漏或出现过多的摊铺料,如果摊铺的质量没有达到预先设定的标准,必须进行重新摊铺。因此,需要进行道路宽度的识别,来保证路面上摊铺料分布均匀性。
2、在摊铺、碾压这类道路无人化施工场景中,摊铺机通过位于其熨平板伸缩段上的高精度差分定位系统来获取路面边界点的定位坐标,从而获取道路宽度信息,然后根据路宽信息结合控制策略给压路机下发施工路径和施工动作。而上述方式依赖于高精度差分定位系统的位置信息,一旦出现信号弱或者无信号的应用场景,道路无人化施工将无法正常进行。
3、因此,需要提供一种能够适用于无信号覆盖区域内实现路宽检测并且能够不依赖于高精度差分定位系统的道路宽度识别系统来解决上述技术问题。
技术实现思路
1、为了解决上述技术问题,本实用新型提供了一种基于激光雷达的道路宽度识别系统。解决了现有技术中在信号弱或者无信号的应用场景下道路无人化施工将无法正常进行的技术问题。
2、本实用新型的技术效果通过如下实现的:
3、提供一种基于激光雷达的道路宽度识别系统,包括:
4、两个辅助靶标,两个所述辅助靶标用于分别安装于摊铺机的熨平板在宽度方向上的两端,所述熨平板为伸缩式熨平板;
5、道路宽度识别雷达,所述道路宽度识别雷达用于安装在所述摊铺机上,所述道路宽度识别雷达用于扫描两个所述辅助靶标,以得到两个所述辅助靶标的靶标位置;以及,
6、控制装置,所述控制装置和所述道路宽度识别雷达电连接,所述控制装置用于当所述熨平板的两端抵接至道路边缘时根据两个所述辅助靶标的靶标位置计算两个所述辅助靶标之间的间隔宽度,以得到道路宽度。
7、进一步地,所述道路宽度识别雷达对应两个所述辅助靶标设置有两个,每个所述道路宽度识别雷达用于扫描对应的一个所述辅助靶标。
8、进一步地,所述道路宽度识别雷达用于安装在所述摊铺机的车身上,两个所述道路宽度识别雷达用于分别布置于所述车身在宽度方向上的两侧。
9、进一步地,所述基于激光雷达的道路宽度识别系统还包括导航建图雷达,所述导航建图雷达用于安装在所述摊铺机上,所述导航建图雷达用于根据环境点云建立地图信息;
10、所述导航建图雷达和所述控制装置电连接,所述控制装置还用于根据所述地图信息得到所述导航建图雷达的实时定位信息。通过搭配设置道路宽度识别雷达和在摊铺机的熨平板边缘设置辅助靶标,使得辅助靶标的位置能够同步熨平板的伸缩状态,实现对摊铺机的熨平板边缘的坐标检测,从而根据导航建图雷达和道路宽度识别雷达的相对位置关系和熨平板边缘的坐标完成道路宽度的识别过程。
11、进一步地,所述导航建图雷达用于安装于所述摊铺机的车身的顶部。
12、进一步地,所述基于激光雷达的道路宽度识别系统还包括两个高精度差分定位装置,两个所述高精度差分定位装置分别安装在两个所述辅助靶标上,以通过两个所述高精度差分定位装置获取两个所述辅助靶标的靶标位置;
13、两个所述高精度差分定位装置和所述控制装置电连接。
14、进一步地,两个所述高精度差分定位装置分别安装于所述辅助靶标的顶部。
15、进一步地,所述基于激光雷达的道路宽度识别系统设置为当所述摊铺机所在环境无信号覆盖时通过所述道路宽度识别雷达扫描对应的辅助靶标以确定其位置信息,且当所述摊铺机所在环境有信号覆盖时通过所述高精度差分定位装置测量其所在的辅助靶标的位置信息。
16、另外,还提供一种摊铺机,包括:
17、车身,所述车身上设置有熨平板;以及,
18、基于激光雷达的道路宽度识别系统,所述基于激光雷达的道路宽度识别系统为上述基于激光雷达的道路宽度识别系统,所述基于激光雷达的道路宽度识别系统中的两个辅助靶标分别安装于所述熨平板在宽度方向上的两端。
19、进一步地,所述熨平板在宽度方向上的两端均设置有伸缩板,两个所述辅助靶标一一对应安装在两个所述伸缩板上。
20、如上所述,本实用新型具有如下有益效果:
21、本申请通过搭配设置道路宽度识别雷达和在摊铺机的熨平板边缘设置辅助靶标,使得辅助靶标的位置能够同步熨平板的伸缩状态,实现对摊铺机的熨平板边缘的坐标检测,从而根据导航建图雷达和道路宽度识别雷达的相对位置关系和熨平板边缘的坐标完成道路宽度的识别过程。
技术特征:
1.一种基于激光雷达的道路宽度识别系统,其特征在于,包括:
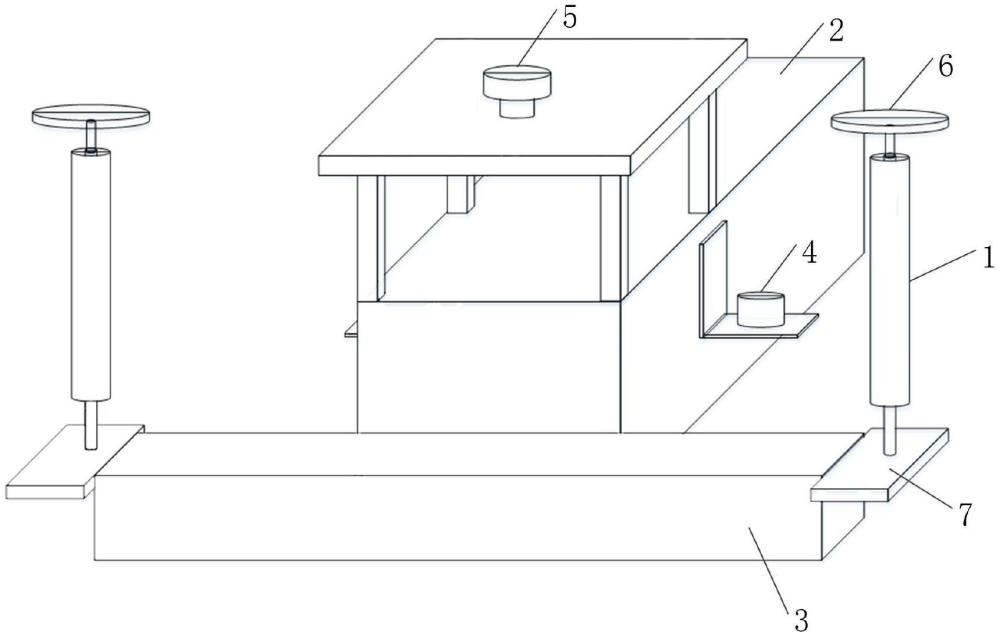
2.根据权利要求1所述的基于激光雷达的道路宽度识别系统,其特征在于,所述道路宽度识别雷达(4)对应两个所述辅助靶标(1)设置有两个,每个所述道路宽度识别雷达(4)用于扫描对应的一个所述辅助靶标(1)。
3.根据权利要求2所述的基于激光雷达的道路宽度识别系统,其特征在于,所述道路宽度识别雷达(4)用于安装在所述摊铺机(2)的车身上,两个所述道路宽度识别雷达(4)用于分别布置于所述车身在宽度方向上的两侧。
4.根据权利要求1至3任意一项所述的基于激光雷达的道路宽度识别系统,其特征在于,所述基于激光雷达的道路宽度识别系统还包括导航建图雷达(5),所述导航建图雷达(5)用于安装在所述摊铺机(2)上,所述导航建图雷达(5)用于根据环境点云建立地图信息;
5.根据权利要求4所述的基于激光雷达的道路宽度识别系统,其特征在于,所述导航建图雷达(5)用于安装于所述摊铺机(2)的车身的顶部。
6.根据权利要求1至3任意一项所述的基于激光雷达的道路宽度识别系统,其特征在于,所述基于激光雷达的道路宽度识别系统还包括两个高精度差分定位装置(6),两个所述高精度差分定位装置(6)分别安装在两个所述辅助靶标(1)上,以通过两个所述高精度差分定位装置(6)获取两个所述辅助靶标(1)的靶标位置;
7.根据权利要求6所述的基于激光雷达的道路宽度识别系统,其特征在于,两个所述高精度差分定位装置(6)分别安装于所述辅助靶标(1)的顶部。
8.根据权利要求7所述的基于激光雷达的道路宽度识别系统,其特征在于,所述基于激光雷达的道路宽度识别系统设置为当所述摊铺机(2)所在环境无信号覆盖时通过所述道路宽度识别雷达(4)扫描对应的辅助靶标(1)以确定其位置信息,且当所述摊铺机(2)所在环境有信号覆盖时通过所述高精度差分定位装置(6)测量其所在的辅助靶标(1)的位置信息。
9.一种摊铺机,其特征在于,包括:
10.根据权利要求9所述的摊铺机,其特征在于,所述熨平板(3)在宽度方向上的两端均设置有伸缩板(7),两个所述辅助靶标(1)一一对应安装在两个所述伸缩板(7)上。
技术总结
本技术涉及一种基于激光雷达的道路宽度识别系统及摊铺机,系统包括:两个辅助靶标,用于分别安装于摊铺机的熨平板在宽度方向上的两端,所述熨平板为伸缩式熨平板;道路宽度识别雷达,所述道路宽度识别雷达用于安装在所述摊铺机上,所述道路宽度识别雷达用于扫描两个所述辅助靶标得到其靶标位置;控制装置,所述控制装置和所述道路宽度识别雷达电连接,所述控制装置用于当所述熨平板的两端抵接至道路边缘时根据两个所述辅助靶标的靶标位置计算两个所述辅助靶标之间的间隔宽度。通过设置能够同步熨平板伸缩状态的辅助靶标,实现对摊铺机的熨平板两端边缘的位置检测,以结合摊铺机和道路宽度识别雷达的相对位置关系完成道路宽度的识别过程。
技术研发人员:武博文,雷焓,祖爽,王望,张志威
受保护的技术使用者:徐工集团工程机械股份有限公司道路机械分公司
技术研发日:20230712
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!