一种适用于测试水下机器人航速、抗流能力的装置的制作方法
本技术涉及水下机器人,特别涉及一种适用于测试水下机器人航速、抗流能力的装置。
背景技术:
1、在水下机器人投入市场之前,需对水下机器人在不同水体流速环境中的航速及抗流能力进行测试,以判断该水下机器人整体的性能或是否达到投入市场的标准,进一步确保水下机器人的质量。在对水下机器人航速及抗流能力测试过程中,一般是将水下机器人放在泳池内的静水中或在湖泊及河流等水域内进行测试,但在湖泊及河流水域测试时,受湖泊及河流底部是否平整及天气不可控因素影响大,这样不仅加剧户外测试实施的难度,还影响对水下机器航速及抗流能力测试的精确性。
2、于是,目前在对水下机器人航速及抗流能力测试过程中,大部分是将水下机器人放在室内泳池的静水中和实验室搭建起的静水中进行测试,但相对静止状态的静水只是自然水域中水体环境之一,致水下机器人在该水体环境中测试,所测试的航速只反映水下机器人单一方向的动力性能,并未反映水下机器人在其他水体环境中的航速及抗流能力,从而得不到水下机器人综合航速及综合抗流能力,使水下机器人质量得不到保障。
3、由此,有必要对现有用于模拟水下机器人航行中水体环境结构及方式进行改进及设计,以解决在静水中测试水下机器人航速,因所测试的水体环境过于单一,致所测试出的水下机器人航速只反映水下机器人单一的动力性能的问题。
技术实现思路
1、本实用新型的目的在于提出一种适用于测试水下机器人航速、抗流能力的装置,以解决在静水中测试水下机器人航速,因所测试的水体环境过于单一,致所测试出的水下机器人航速只反映水下机器人单一的动力性能的问题。
2、为解决上述的技术问题,本实用新型采用以下技术方案:
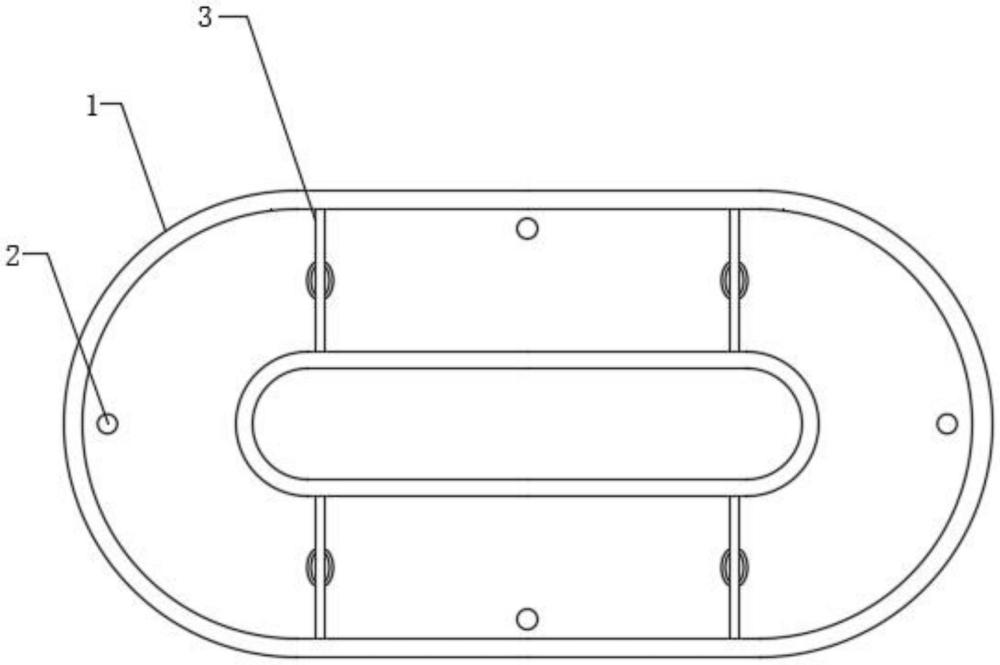
3、一种适用于测试水下机器人航速、抗流能力的装置,包括水池、水流测速件、水流扰动件及控制系统;所述水池底部设置有水流测速件,水流测速件及水流扰动件分别与控制系统电连接,水流扰动件设置于水池内壁间;水流扰动件包括支撑杆、夹具、连接座及螺旋桨;支撑杆端部与水池内壁连接,支撑杆与夹持座一端的夹具相夹合,夹持座另一端通过铰接座与连接座铰接;连接座另一端的套环与连接杆转动连接,连接杆侧壁与转动拉动部连接;连接杆下部与螺旋桨转轴相连的电机连接,螺旋桨转轴上设置有螺旋桨。
4、进一步,所述水流扰动件位于相邻两个水流测速件间,水流测速件沿水池底部设置为四个,四个水流测速件呈环形排布。
5、进一步,所述控制系统通过控制器一与驱动螺旋桨转动的电机电连接,控制系统通过控制器二与水流测速件电连接,水流测速件设置为水流流速传感器。
6、进一步,所述夹具分别位于夹持座两侧,两个夹具分别与夹持座注塑为一体,夹具夹持开口一与夹持座夹持开口二的轮廓相匹配。
7、进一步,所述连接座包括连接柄及铰接块;连接柄侧壁分别与两个套环侧壁连接,连接柄一一端与铰接块连接;铰接块通过铰接轴与铰接座铰接,u型槽状的铰接座与夹持座一端连接。
8、进一步,所述转动拉动部包括紧固环,连接柄一及拉杆;紧固环套接于连接杆上半段,紧固环侧壁与连接柄一一端连接,连接柄一上的通孔内部嵌设有拉杆。
9、进一步,所述连接杆上套接有防滑圆环,防滑圆环分别位于两个套环下方,防滑圆环外径大于套环外径。
10、进一步,所述连接杆上部与辅助提拉帽连接。
11、工作过程:需模拟机器人水下航行中的水流流动环境时,可通过控制系统向水流扰动件发送测试阶段中所需水流流速的信息,水流扰动件中的电机便带动螺旋桨转快或转慢来调节水池内水流流速,后经水流测速件将调节后的流速反馈给控制系统并显示;若显示的流速不是测试所需的流速,则通过电机带动螺旋桨转快或转慢继续对水池流速进行调节;若显示的流速在测试所需的流速范围内,使螺旋桨保持此时的转速不变,以模拟水下机器人在水下航行中的不同流速环境之一,为后续测试机器人水下航速及抗流能力做准备。
12、在以上过程中,若要模拟机器人航行中其他水流情况,通过拉动与连接杆相连的转动拉动部转至不同角度,使螺旋桨处于不同角度姿态放置位来驱使水体流动,以模拟水下机器人在水下航行中的其他水流情况之一;另外,也可通过朝夹持座或转动拉动部一端推动连接杆,与连接杆相连的连接座便绕铰接座转动,进而带动螺旋桨转至不同角度,使螺旋桨处于不同角度姿态外来驱使水体流动,以模拟水下机器人在水下航行中的其他水流情况之一。
13、与现有技术相比,本实用新型至少具有以下有益效果之一:
14、本实用新型通过将水流扰动件与控制系统电连接,水流扰动件设置于水池内壁间;能够在对水下机器人航速及抗流能力进行模拟测试时,可通过控制系统控制水流扰动件中螺旋桨的不同转速,进一步将水池中的水调至多种流速下的水体环境,使其更贴合自然水域中的多种流速,为后续测机器人航速及抗流能力提供多种水体测试环境,以得到水下机器人综合航速及综合抗流能力的测试结果,以解决在静水中测试水下机器人航速,因所测试的水体环境过于单一,致所测试出的水下机器人航速只反映水下机器人单一的动力性能的问题。
技术特征:
1.一种适用于测试水下机器人航速、抗流能力的装置,其特征在于:包括水池(1)、水流测速件(2)、水流扰动件(3)及控制系统;所述水池(1)底部设置有水流测速件(2),水流测速件(2)及水流扰动件(3)分别与控制系统电连接,水流扰动件(3)设置于水池(1)内壁间;水流扰动件(3)包括支撑杆(4)、夹具(5)、连接座(6)及螺旋桨(7);支撑杆(4)端部与水池(1)内壁连接,支撑杆(4)与夹持座(8)一端的夹具(5)相夹合,夹持座(8)另一端通过铰接座(9)与连接座(6)铰接;连接座(6)另一端的套环(10)与连接杆(12)转动连接,连接杆(12)侧壁与转动拉动部(13)连接;连接杆(12)下部与螺旋桨转轴相连的电机(15)连接,螺旋桨转轴上设置有螺旋桨(7)。
2.根据权利要求1所述的一种适用于测试水下机器人航速、抗流能力的装置,其特征在于:所述水流扰动件(3)位于相邻两个水流测速件(2)间,水流测速件(2)沿水池(1)底部设置为四个,四个水流测速件(2)呈环形排布。
3.根据权利要求1所述的一种适用于测试水下机器人航速、抗流能力的装置,其特征在于:所述控制系统通过控制器一与驱动螺旋桨(7)转动的电机(15)电连接,控制系统通过控制器二与水流测速件(2)电连接,水流测速件(2)设置为水流流速传感器。
4.根据权利要求1所述的一种适用于测试水下机器人航速、抗流能力的装置,其特征在于:所述夹具(5)分别位于夹持座(8)两侧,两个夹具(5)分别与夹持座(8)注塑为一体,夹具夹持开口一(16)与夹持座夹持开口二(17)的轮廓相匹配。
5.根据权利要求1所述的一种适用于测试水下机器人航速、抗流能力的装置,其特征在于:所述连接座(6)包括连接柄(18)及铰接块(19);连接柄(18)侧壁分别与两个套环(10)侧壁连接,连接柄(18)一端与铰接块(19)连接;铰接块(19)通过铰接轴与铰接座(9)铰接,u型槽状的铰接座(9)与夹持座(8)一端连接。
6.根据权利要求1所述的一种适用于测试水下机器人航速、抗流能力的装置,其特征在于:所述转动拉动部(13)包括紧固环(20)、连接柄一(21)及拉杆(22);紧固环(20)套接于连接杆(12)上半段,紧固环(20)侧壁与连接柄一(21)一端连接,连接柄一(21)上的通孔内嵌设有拉杆(22)。
7.根据权利要求1所述的一种适用于测试水下机器人航速、抗流能力的装置,其特征在于:所述连接杆(12)上套接有防滑圆环(11),防滑圆环(11)分别位于两个套环(10)下方,防滑圆环(11)外径大于套环(10)外径。
8.根据权利要求1所述的一种适用于测试水下机器人航速、抗流能力的装置,其特征在于:所述连接杆(12)上部与辅助提拉帽(14)连接。
技术总结
本技术涉及水下机器人技术领域,特别涉及一种适用于测试水下机器人航速、抗流能力的装置,包括环形水池、水流测速件、水流扰动件及控制系统;能够在对水下机器人航速及抗流能力进行模拟测试时,可通过控制系统控制水流扰动件中螺旋桨的不同转速,进一步将环形水池中的水调至多种流速下的水体环境,使其更贴合自然水域中的多种流速,为后续测机器人航速及抗流能力提供多种水体测试环境,以得到水下机器人综合航速及综合抗流能力的测试结果,以解决在静水中测试水下机器人航速,因所测试的水体环境过于单一,致所测试出的水下机器人航速只反映水下机器人单一的动力性能的问题。
技术研发人员:谭书海,熊淦
受保护的技术使用者:深圳潜行创新科技有限公司
技术研发日:20230714
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!