重复定位精度测试平台的制作方法
本申请涉及机器人,特别是涉及一种重复定位精度测试平台。
背景技术:
1、工业机器人是工业自动化领域中重要的自动化设备,但由于制造装配误差、控制误差、运动热变形、回转间隙以及疲劳磨损等诸多原因容易导致工业机器人的实际位置与命令位置的偏差较大,甚至出现机器人末端抖动的故障现象,限制了工业机器人的应用。因此,对于工业机器人的重复定位精度的测试分析尤为重要。
2、而在传统技术中,对工业机器人的重复定位精度的测试主要依赖百分表、千分表,通过机器人循环运动时碰撞仪表探针来获取精度误差数据,但碰撞往往会带来累计误差,测试精度较差。
技术实现思路
1、基于此,有必要针对上述问题,提供一种重复定位精度测试平台,用于对机器人的重复定位精度进行测试,包括:
2、基座;
3、立柱,连接所述基座;
4、滑动组件,包括若干个,各所述滑动组件分别连接至所述立柱,且各所述滑动组件的滑动方向不同;
5、距离检测组件,包括若干个,各所述距离检测组件分别与对应的所述滑动组件连接,所述距离检测组件能够在对应的所述滑动组件的带动下滑动。
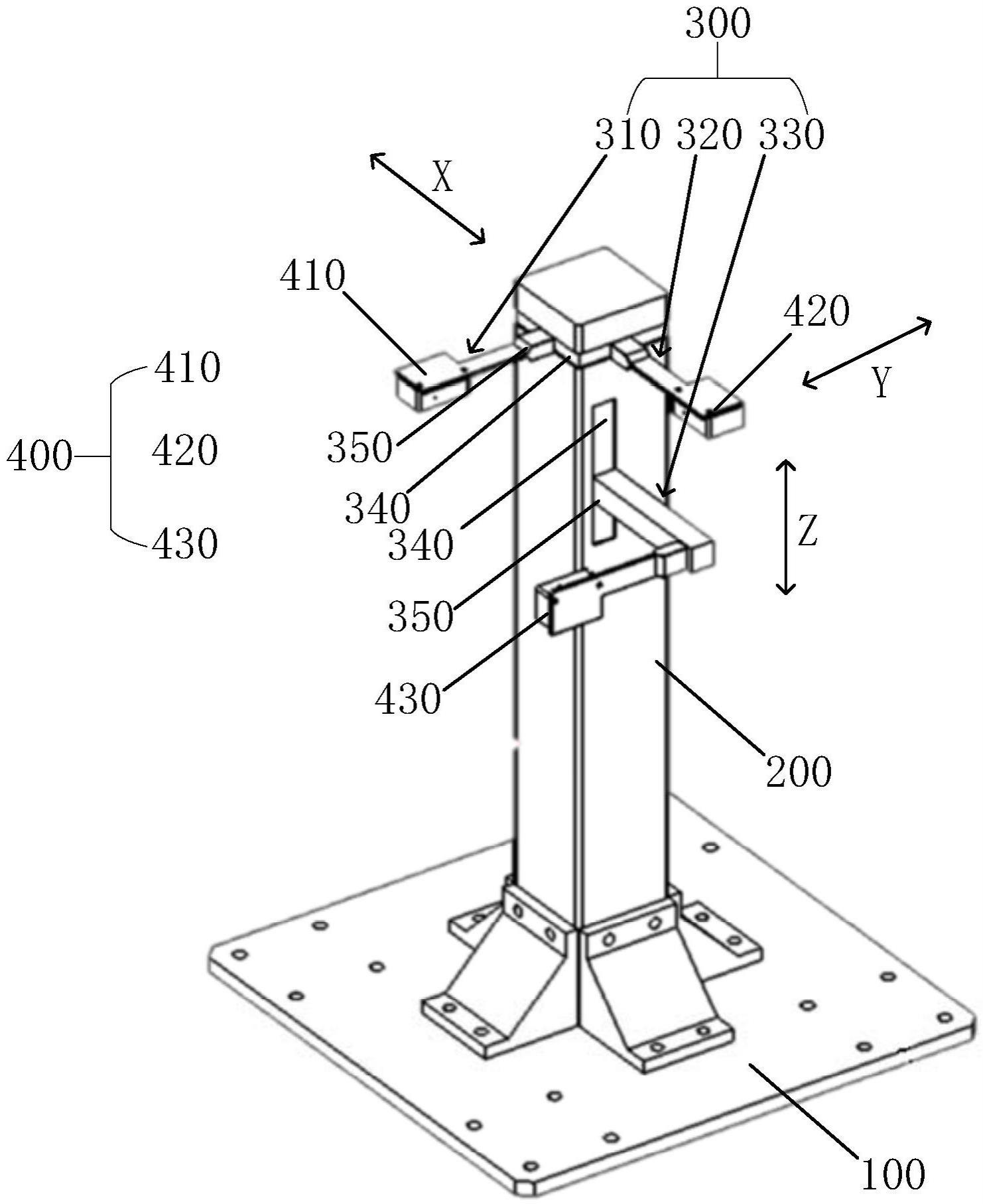
6、在其中一个实施例中,所述滑动组件包括第一滑动组件、第二滑动组件以及第三滑动组件,所述第一滑动组件的滑动方向为x方向,所述第二滑动组件的滑动方向为y方向,所述第三滑动组件的滑动方向为z方向。
7、在其中一个实施例中,所述立柱为长方体,所述第一滑动组件与所述第二滑动组件设置于所述长方体的相邻两个侧面。
8、在其中一个实施例中,所述第一滑动组件的滑动方向与所述第二滑动组件的滑动方向位于同一水平面。
9、在其中一个实施例中,所述第三滑动组件位于所述第一滑动组件与所述第二滑动组件远离所述基座的一侧。
10、在其中一个实施例中,所述第三滑动组件位于所述第一滑动组件与所述第二滑动组件靠近所述基座的一侧。
11、在其中一个实施例中,所述第三滑动组件与所述第一滑动组件位于所述长方体的同一侧面,或者,所述第三滑动组件与所述第二滑动组件位于所述长方体的同一侧面。
12、在其中一个实施例中,每个所述滑动组件均包括导轨和滑块,所述滑块的一端连接所述导轨且能够沿所述导轨滑动,所述滑块的另一端连接对应的所述距离检测组件。
13、在其中一个实施例中,所述导轨的长度范围为50mm至100mm。
14、在其中一个实施例中,所述距离检测组件包括激光位移传感器。
15、本申请实施例提供的重复定位精度测试平台,在基座上设置立柱,在立柱上连接有若干个滑动组件,各滑动组件的滑动方向不同,每个滑动组件均连接有对应的距离检测组件,因此,各个滑动组件可以分别带动各自对应的距离检测组件朝向不同的方向滑动,当将该重复定位精度测试平台应用于机器人的重复定位精度测试时,可以将机器人移动至测试平台处,再控制各个滑动组件沿不同的滑动方向带动各自对应的距离检测组件移动,进而得到各个距离检测组件到机器人不同位置的距离信息,以此作为后续的精度评判标准,通过反复多次执行上述操作,可以得到机器人在不同方向上的偏移量,进而确定出机器人的重复定位精度。上述重复定位精度测试平台中采用距离检测组件可以无接触式地检测得到机器人的位置信息,避免传统技术中由于碰撞仪表探针带来的累计误差,测试精度较高,并且,每个距离检测组件均具有对应的滑动组件,滑动组件可以带动对应的距离检测组件自由滑动以适应不同大小的待测目标,灵活性和适配性较好。
技术特征:
1.一种重复定位精度测试平台,用于对机器人的重复定位精度进行测试,其特征在于,包括:
2.根据权利要求1所述的重复定位精度测试平台,其特征在于,所述滑动组件包括第一滑动组件、第二滑动组件以及第三滑动组件,所述第一滑动组件的滑动方向为x方向,所述第二滑动组件的滑动方向为y方向,所述第三滑动组件的滑动方向为z方向。
3.根据权利要求2所述的重复定位精度测试平台,其特征在于,所述立柱的形状为长方体,所述第一滑动组件与所述第二滑动组件设置于所述长方体的相邻两个侧面。
4.根据权利要求3所述的重复定位精度测试平台,其特征在于,所述第一滑动组件的滑动方向与所述第二滑动组件的滑动方向位于同一水平面。
5.根据权利要求4所述的重复定位精度测试平台,其特征在于,所述第三滑动组件位于所述第一滑动组件与所述第二滑动组件远离所述基座的一侧。
6.根据权利要求4所述的重复定位精度测试平台,其特征在于,所述第三滑动组件位于所述第一滑动组件与所述第二滑动组件靠近所述基座的一侧。
7.根据权利要求5或6所述的重复定位精度测试平台,其特征在于,所述第三滑动组件与所述第一滑动组件位于所述长方体的同一侧面,或者,所述第三滑动组件与所述第二滑动组件位于所述长方体的同一侧面。
8.根据权利要求1所述的重复定位精度测试平台,其特征在于,每个所述滑动组件均包括导轨和滑块,所述滑块的一端连接所述导轨且能够沿所述导轨滑动,所述滑块的另一端连接对应的所述距离检测组件。
9.根据权利要求8所述的重复定位精度测试平台,其特征在于,所述导轨的长度范围为50mm至100mm。
10.根据权利要求1所述的重复定位精度测试平台,其特征在于,所述距离检测组件包括激光位移传感器。
技术总结
本申请涉及机器人技术领域,具体公开一种重复定位精度测试平台,用于对机器人的重复定位精度进行测试,包括基座、立柱、滑动组件以及距离检测组件。立柱连接基座;滑动组件包括若干个,各滑动组件分别连接至立柱,且各滑动组件的滑动方向不同;距离检测组件包括若干个,各距离检测组件分别与对应的滑动组件连接,距离检测组件能够在对应的滑动组件的带动下滑动。上述重复定位精度测试平台采用距离检测组件可以无接触式检测得到机器人的位置信息,避免由于碰撞仪表探针带来的累计误差,测试精度较高,并且,每个距离检测组件均具有对应的滑动组件,滑动组件可以带动对应的距离检测组件自由滑动以适应不同大小的待测目标,灵活性和适配性较好。
技术研发人员:孙平,孙恺,曹宇男
受保护的技术使用者:苏州艾利特机器人有限公司
技术研发日:20230720
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!