一种两轮车毫米波雷达控制器的制作方法
本技术涉及汽车监测,具体涉及一种两轮车毫米波雷达控制器。
背景技术:
1、随着智能化汽车快速发展,现有毫米波雷达为汽车使用越来越多,但是现有技术中的毫米波雷达多为控制和探测头一体化,不适合两轮车使用,不适合个性化要求;此外,现有的毫米波雷达多为专用,仅能使用一家控制器,一旦遇到缺货问题就会影响汽车使用,也无法形成一定的标准化生产,适用性差。
2、因此,提出一种解决上述问题的两轮车毫米波雷达控制器实为必要。
技术实现思路
1、本实用新型的目的是克服现有技术的不足和缺陷,提供一种两轮车毫米波雷达控制器,可以适配多家毫米波雷达传感器,满足不同用户需求,且有效提高了驱动能力,适用性高。
2、本实用新型的目的是通过以下技术方案来实现的:
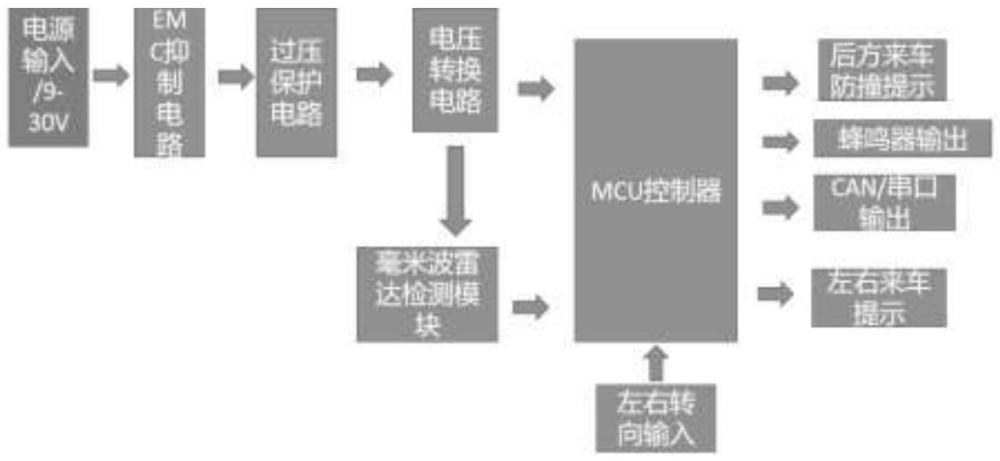
3、一种两轮车毫米波雷达控制器,包括电源电路、电压转换电路、mcu控制电路、毫米波雷达检测模块、驱动电路、can通讯电路以及串口通讯电路,所述电源电路的输出端与所述电压转换电路连接,所述电压转换电路分别与所述mcu控制电路及毫米波雷达检测模块连接供电,且所述毫米波雷达检测模块与所述mcu控制电路连接,所述mcu控制电路均与所述驱动电路、can通讯电路以及串口通讯电路连接对应输出。
4、作为本实用新型一种优选的技术方案,所述电源电路设置有电源输入电路、emc抑制电路以及过压保护电路,且所述emc抑制电路连接在所述电源输入电路与所述过压保护电路之间。
5、作为本实用新型一种优选的技术方案,所述电源输入电路外接9v到36v电压。
6、作为本实用新型一种优选的技术方案,所述emc抑制电路设置有共模电路l1,且所述共模电路l1的两端并联有相互串联的电容c20及电阻r8。
7、作为本实用新型一种优选的技术方案,所述过压保护电路设置有二极管d1,所述二极管d1连接在所述共模电路l1的后端,所述二极管d1的后端连接有串联的电阻r3、r9,且所述电阻r9的另一端接地,所述二极管d1的后端还连接有串联的电阻r1、稳压二极管dz1以及电阻r12,所述电阻r12的另一端接地,且所述电阻r12的两端并联有三极管q4,所述三极管q4的集电极连接有电阻r4,所述电阻r4的另一端与所述二极管d1连接,所述三极管q4的集电极与发射极之间连接有电阻r11,所述电阻r11的两端连接有三极管q3,所述三极管q3的集电极连接有串联的电阻r6、r2,所述电阻r2的另一端与所述二极管d1连接,且所述电阻r2的两端连接有mos管q1,所述mos管q1的后端连接有相互并联的电容c11、电容c11以及稳压二极管dz4,且所述稳压二极管dz4的两端并联有串联的电阻r5及led1。
8、作为本实用新型一种优选的技术方案,所述电压转换电路设置有降压器u1及降压器u2,所述降压器u1的2号引脚与所述电容c9连接,所述降压器u1的1号引脚与2号引脚之间连接有电容c2,所述降压器u1的2号引脚与3号引脚之间连接有电容c3,且所述降压器u1的3号引脚输出5v电压,所述降压器u2的2号引脚连接所述降压器u1的3号引脚,且降压器u2的2号引脚与1号引脚之间连接有电容c4,所述降压器u2的2号引脚与3号引脚之间连接有电容c5,且所述降压器u2的3号引脚输出3.3v电压,且所述降压器u2的3号引脚还连接有并联的电容c6、c7、c8,且所述电容c7与电容c8之间连接有电感l2,且所述电感l2后端输出3.3va。
9、作为本实用新型一种优选的技术方案,所述mcu控制电路设置有控制器u5、外读存储器u4以及烧录器p12,所述控制器u5的vdd端子连接3.3v电压,所述控制器u5的pd14与pd15端子之间连接有晶振x1,所述晶振x1的3号与4号引脚之间连接有电容c16,所述晶振x1的1号引脚与2号引脚之间连接有电容c17,所述外读存储器u4的e0、e1、e2以及vss端子接地,所述外读存储器u4的vcc端子连接3.3v电压,所述外读存储器u4的vcc端子与mode端子之间连接有电容c14并接地,所述外读存储器u4的vcc端子与scl端子之间连接有电阻r25同时与所述控制器u5的pb6端子连接,所述外读存储器u4的vcc端子与sda端子之间连接有电阻r23同时与所述控制器u5的pb7端子连接,所述烧录器p12的1号引脚连接3.3v电压,所述烧录器p12的2号引脚连接控制器u5的pa13端子,所述烧录器p12的3号引脚连接控制器u5的pa14端子,所述烧录器p12的4号引脚接地。
10、作为本实用新型一种优选的技术方案,所述驱动电路设置为四路驱动电路,设置有mos管q6、q7、q10、q11以及三极管q8、q9、q12、q13,所述mos管q6的源极与栅极之间连接有电阻r26,且所述mos管q6的源极还与所述电源电路连接,所述mos管q6的漏极与所述串口通讯电路连接,所述mos管q6的栅极连接有电阻r30,所述电阻r30的另一端与所述三极管q8的集电极连接,所述三极管q8的基极连接有电阻r35,所述电阻r35的另一端与所述控制器u5的pa8端子连接,且所述三极管q8的基极与发射极之间连接有电阻r38,且所述三极管q8的发射极接地,所述mos管q7的源极与栅极之间连接有电阻r27,且所述mos管q6的源极还与所述电源电路连接,所述mos管q7的漏极与所述串口通讯电路连接,所述mos管q7的栅极连接有电阻r31,所述电阻r31的另一端与所述三极管q9的集电极连接,所述三极管q9的基极连接有电阻r36,所述电阻r36的另一端与所述控制器u5的pa4端子连接,且所述三极管q9的基极与发射极之间连接有电阻r37,且所述三极管q9的发射极接地,所述mos管q10的源极与栅极之间连接有电阻r39,且所述mos管q10的源极还与所述电源电路连接,所述mos管q10的漏极与所述串口通讯电路连接,所述mos管q10的栅极连接有电阻r41,所述电阻r41的另一端与所述三极管q12的集电极连接,所述三极管q12的基极连接有电阻r44,所述电阻r44的另一端与所述控制器u5的pa3端子连接,且所述三极管q12的基极与发射极之间连接有电阻r46,且所述三极管q12的发射极接地,所述mos管q11的源极与栅极之间连接有电阻r40,且所述mos管q11的源极还与所述电源电路连接,所述mos管q11的漏极与所述串口通讯电路连接,所述mos管q11的栅极连接有电阻r42,所述电阻r42的另一端与所述三极管q13的集电极连接,所述三极管q13的基极连接有电阻r45,所述电阻r45的另一端与所述控制器u5的pa2端子连接,且所述三极管q13的基极与发射极之间连接有电阻r47,且所述三极管q13的发射极接地。
11、作为本实用新型一种优选的技术方案,所述can通讯电路设置有收发器u3,所述收发器u3的txd端子连接有电阻r14,所述电阻r14的另一端与所述控制器u5的pa12端子连接,所述收发器u3的vcc端子连接5v电压,所述收发器u3的gnd端子接地,且所述收发器u3的vcc端子与gnd端子之间连接有电容c12,所述收发器u3的rxd端子连接有电阻r20,所述电阻r20的另一端与所述控制器u5的pa11端子连接,所述收发器u3的stb端子连接有电阻r15,所述电阻r15的另一端接地,所述收发器u3的canh端子连接有电阻r18,所述电阻r18的另一端连接有电阻r16,所述电阻r16的另一端与所述控制器u5的pa9连接,且所述电阻r18的另一端与所述串口通讯电路连接,所述收发器u3的canl端子连接有电阻r19,所述电阻r19的另一端连接有电阻r22,所述电阻r22的另一端与所述控制器u5的pa10连接,且所述电阻r19的另一端与所述串口通讯电路连接,所述收发器u3的vio端子连接有电阻r21,所述电阻r21的另一端连接3.3v电压,且所述电阻r21还并联有电容c13,所述电容c13的另一端接地。
12、作为本实用新型一种优选的技术方案,所述串口通讯电路设置有雷达输入口p11,所述雷达输入口p11的1号引脚连接外部电压vcc,所述雷达输入口p11的2号引脚与所述控制器u5的pa10端子连接,所述雷达输入口p11的3号引脚与所述控制器u5的pa9端子连接,所述雷达输入口p11的4号引脚接地。
13、与现有技术相比,本实用新型具有如下的有益效果:
14、本实用新型将汽车的探测和控制分离,利用毫米雷达控制技术将探头独立检测目标再给控制部分处理,方便探头标准化和客户个性化需求,同时也方便进行标准化和模块化生产;此外还具有多重保护和大功率驱动能力,可以适应两轮车的前装和后装,适用性高。
- 还没有人留言评论。精彩留言会获得点赞!