一种火箭发动机壳体的自动化三维测量装置的制作方法
本技术属于三维测量,具体涉及一种火箭发动机壳体的自动化三维测量装置。
背景技术:
1、火箭发动机壳体在完成机械加工以后,需要对其各项尺寸进行检测,以确保各项尺寸均在公差范围内,保证产品是合格的,可以进入下一道工序。
2、目前,对火箭发动机壳体的尺寸检测方法是人工检测配合三坐标测量仪自动检测,人工检测通常是使用样块对孔类尺寸进行符合性监测,对于公差要求比较高且较小的尺寸,使用游标卡尺等测量器具进行检测,对公差要求较低的大尺寸使用卷尺进行检测,人工不便测量或者测量难度大的尺寸则使用三坐标测量仪编程进行测量。
3、如果各尺寸检测结果都在设计公差要求范围内,则认为其是合格的,可进入下一道工序,如果不符合要求,则认为火箭发动机壳体是不合格品,需要返厂进行修正或进行报废处理,综上,原来的火箭发动机壳体测量方法的缺点有:
4、a)效率低下。火箭发动机壳体所需要测量的尺寸数量大,视火箭发动机壳体大小与复杂程度,一个操作熟练、经验丰富的工人处理一个火箭发动机壳体可能需要至少两天的时间。
5、b)准确率得不到保证。检测结果完全取决于工人的技术,稍有疏忽很容易造成误判。为保证准确率,一个产品往往需要人工进行多次测量。
6、c)自动化程度低。目前火箭发动机壳体的尺寸检测主要是依靠人工进行,只有一些人工较难进行检测的尺寸才使用三坐标测量仪进行测量,但是三坐标测量仪使用需要对每种火箭发动机壳体进行针对性编程,并且使用门槛高,一般工人需要进行长期培训才能掌握这项技术。
7、因此,有必要采取一种更加切实有效的检测方法来克服原先检测方法的不足,来实现火箭发动机壳体尺寸的快速测量、快速判定是否合格,以达到既节约检测成本又提高检测效率、准确度以及自动化程度的目的。
技术实现思路
1、有鉴于此,本实用新型提供了一种火箭发动机壳体的自动化三维测量装置,能够实现火箭发动机壳体三维尺寸数据的自动化测量,并可以在提高产品的检测效率的同时提高检测的准确性。
2、本实用新型是通过下述技术方案实现的:
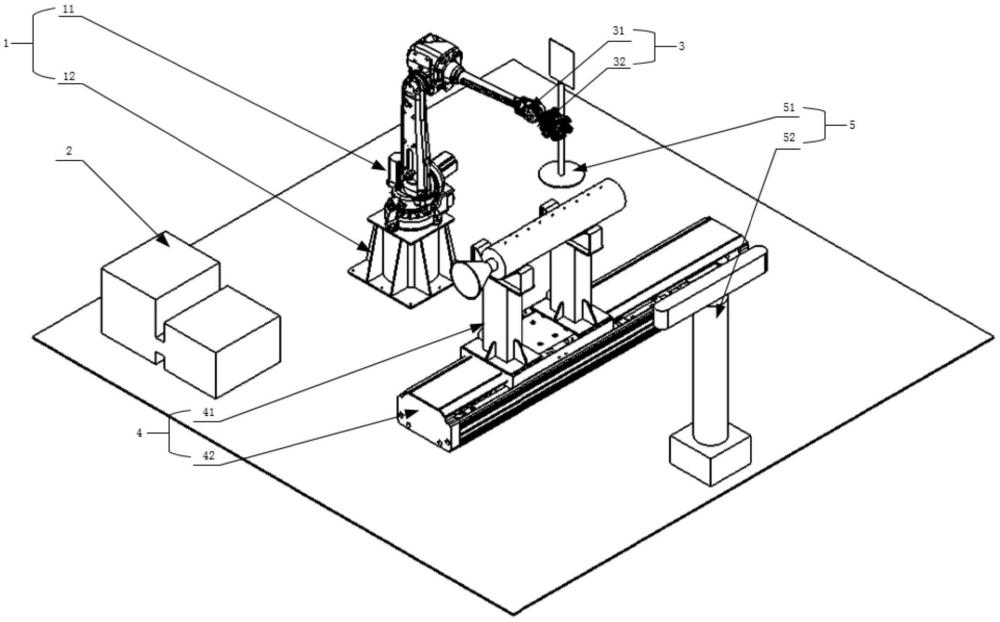
3、一种火箭发动机壳体的自动化三维测量装置,包括:六轴工业机器人、工控柜组件、自动化测头组件、直线模组、支撑架、标定板及跟踪仪;
4、六轴工业机器人通过基座固定在地面上;自动化测头组件安装在六轴工业机器人的端部;直线模组位于六轴工业机器人的工作空间内、六轴工业机器人的正前方;直线模组由滑块和导轨组成;支撑架安装在滑块上,火箭发动机壳体放置于支撑架上;滑块带动支撑架沿导轨的长度方向进行直线往复运动,用于带动六轴工业机器人运动;自动化测头组件和六轴工业机器人用于获取火箭发动机壳体某一区域内的光栅图像;
5、标定板位于工作空间的干涉范围外,用于自动化测头组件位置的标定;
6、跟踪仪和六轴工业机器人分别位于直线模组的两相对侧,用于实时获得自动测头组件的空间位置信息;
7、工控柜组件位于工作空间外,分别与六轴工业机器人、直线模组、跟踪仪及自动化测头组件电性连接;工控柜组件用于供电、设置六轴工业机器人和滑块的运动规划以及接收并处理光栅图像和空间位置信息获得壳体的三围尺寸数据。
8、进一步的,所述自动化测头组件为三维激光扫描测头,包括:面结构光投影组件和相机采集组件;
9、所述面结构光投影组件安装在相机采集组件的双目相机的中间,面结构光投影组件与相机采集组件电性连接;
10、所述面结构光影投影组件通过激光器提供标识;
11、所述相机采集组件通过双目相机获得光栅图像,双目相机内装有滤光片,滤光片用于过滤壳体表面的反射造成的光污染源;双目相机获得的光栅图像将传输给工控柜组件处理。
12、进一步的,所述工控柜组件包括:机器人电源组件、自动化测头电源组件、直线模组电源组件、工业机器人控制柜组件及计算机;
13、所述机器人电源组件与六轴工业机器人电性连接,用于给六轴工业机器人供电;
14、所述自动化测头电源组件与自动化测头组件电性连接,用于给自动化测头组件供电;
15、所述直线模组电源组件与直线模组电性连接,用于给直线模组供电;
16、所述计算机与工业机器人控制柜组件电性连接,工业机器人控制柜组件与六轴工业机器人电性连接,计算机通过机器人控制柜组件控制六轴工业机器人的运动轨迹;
17、所述计算机与自动化测头组件电性连接,用于控制自动化测头组件的启停,以及接收自动化侧头组件的光栅图像,获得点云数据;
18、所述计算机与直线模组电性连接,用于控制直线模组的滑块的移动;
19、所述计算机与跟踪仪电性连接,根据跟踪仪传输的自动测头组件的空间位置信息获得火箭发动机壳体的三维数据。
20、进一步的,所述六轴工业机器人与机器人示教器电性连接,机器人示教器用于寻找六轴工业机器人的运动路径点。
21、进一步的,所述支撑架为y型结构,y型结构的开口端上装有垫块。
22、有益效果:
23、(1)本实用新型的一种火箭发动机壳体的自动化三维测量装置,包括六轴工业机器人、工控柜组件、自动化测头组件、直线模组、支撑架、标定板及跟踪仪,能够实现对火箭发动机壳体的自动化测量;所述三维测量系统可通过六轴工业机器人测量火箭发动机壳体某一区域内不同位姿下的光栅图像,通过直线模组的滑块与导轨间配合获得火箭发动机壳体不同区域内的光栅图像,所述光栅图像经过数据处理可获得火箭发动机壳体完整的三维尺寸数据,所述三维测量系统能够解决火箭发动机壳体尺寸检测过程中存在的检测过程复杂,操作过程自动化难度大、检测效率低、人工操作繁琐等问题,可以减少人员参与的同时确保产品检测效率,还能提高检测准确性。
24、(2)本实用新型的一种火箭发动机壳体的自动化三维测量装置,双目相机内装有滤光片,由于滤光片能够过滤火箭发动机壳体表面的反射造成的光污染源,可以获得清晰完整的图像信息,从而进一步提高检测的准确性。
25、(3)本实用新型的一种火箭发动机壳体的自动化三维测量装置,工业机器人控制柜组件同时与六轴工业机器人和计算机电性连接,计算机与相机采集组件、直线模组以及跟踪仪电性连接,通过计算机的控制可以提高三维测量系统的测量效率的同时提高测量结果的准确性。
26、(4)本实用新型的一种火箭发动机壳体的自动化三维测量装置,支撑架的y型结构的开口端装有垫块,所述垫块可以防止火箭发动机壳体表面刮伤。
技术特征:
1.一种火箭发动机壳体的自动化三维测量装置,其特征在于,包括:六轴工业机器人(11)、工控柜组件(2)、自动化测头组件(3)、直线模组(42)、支撑架(41)、标定板(51)及跟踪仪(52);
2.如权利要求1所述一种火箭发动机壳体的自动化三维测量装置,其特征在于,所述自动化测头组件(3)为三维激光扫描测头,包括:面结构光投影组件(31)和相机采集组件(32);
3.如权利要求2所述一种火箭发动机壳体的自动化三维测量装置,其特征在于,所述工控柜组件(2)包括:机器人电源组件、自动化测头电源组件、直线模组电源组件、工业机器人控制柜组件及计算机;
4.如权利要求3所述一种火箭发动机壳体的自动化三维测量装置,其特征在于,所述六轴工业机器人(11)与机器人示教器电性连接,机器人示教器用于寻找六轴工业机器人(11)的运动路径点。
5.如权利要求1-4任一项所述一种火箭发动机壳体的自动化三维测量装置,其特征在于,所述支撑架(41)为y型结构,y型结构的开口端上装有垫块。
技术总结
本技术公开了一种火箭发动机壳体的自动化三维测量装置,属于三维测量技术领域,包括六轴工业机器人、工控柜组件、自动化测头组件、直线模组、支撑架、标定板及跟踪仪;六轴工业机器人通过基座固定在地面上;自动化测头组件安装在六轴工业机器人的端部;直线模组位于六轴工业机器人的工作空间内;直线模组包含滑块和导轨;支撑架安装在滑块上;标定板位于工作空间的干涉范围外;跟踪仪和六轴工业机器人分别位于直线模组的两相对侧;工控柜组件位于工作空间外,分别与六轴工业机器人、直线模组、跟踪仪及自动化测头组件电性连接。本技术能够实现火箭发动机壳体三维尺寸数据的自动化测量,并可以提高产品的检测效率的同时提高检测的准确性。
技术研发人员:邱玥,李炜,李永亮,黎明诚,东涛,康希锐,谢良康
受保护的技术使用者:陕西电器研究所
技术研发日:20231010
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!