一种适用于多能场景馈线自动化的故障测距方法及系统与流程
本发明涉及电力系统配电自动化,具体为一种适用于多能场景馈线自动化的故障测距方法及系统。
背景技术:
1、根据配电网故障定位精度要求和功能的不同,配电网故障定位又可以分为故障区段定位和故障测距。目前,配电网故障测距的方法主要有行波法、人工智能法、信号注入法、阻抗法。
2、其中,行波法需要较多高精度的量测设备,并且由于成本问题,考虑其不适用于dg(分布式电源)大量接入的配电网;人工智能法随着配电网拓扑结构和故障情况的变化,算法复杂,处理时间花费较多;信号注入法易受到干扰,且成本较高;现有的阻抗法通过忽略分支负荷,利用区段两端测量的电气量信息进行故障测距,利用两端的电气量将带来通信的相关问题。传统的阻抗法适用于测量点与故障点之间无分支线的单侧电源的情况,在已知故障类型和单位线路参数(忽略并联电导、电容)的条件下,利用测量点本地的电压电流值计算故障线路阻抗,从而得到测量点与故障点之间的距离。该方法无需通信获取其它测量点数据,但dg的接入可能使测试点与故障点之间接入分支线,并且使单侧电源系统变为多侧电源系统,所以传统的阻抗方法不适用于测量点与故障点之间存在分支线的情况。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述存在的问题,提出了本发明。
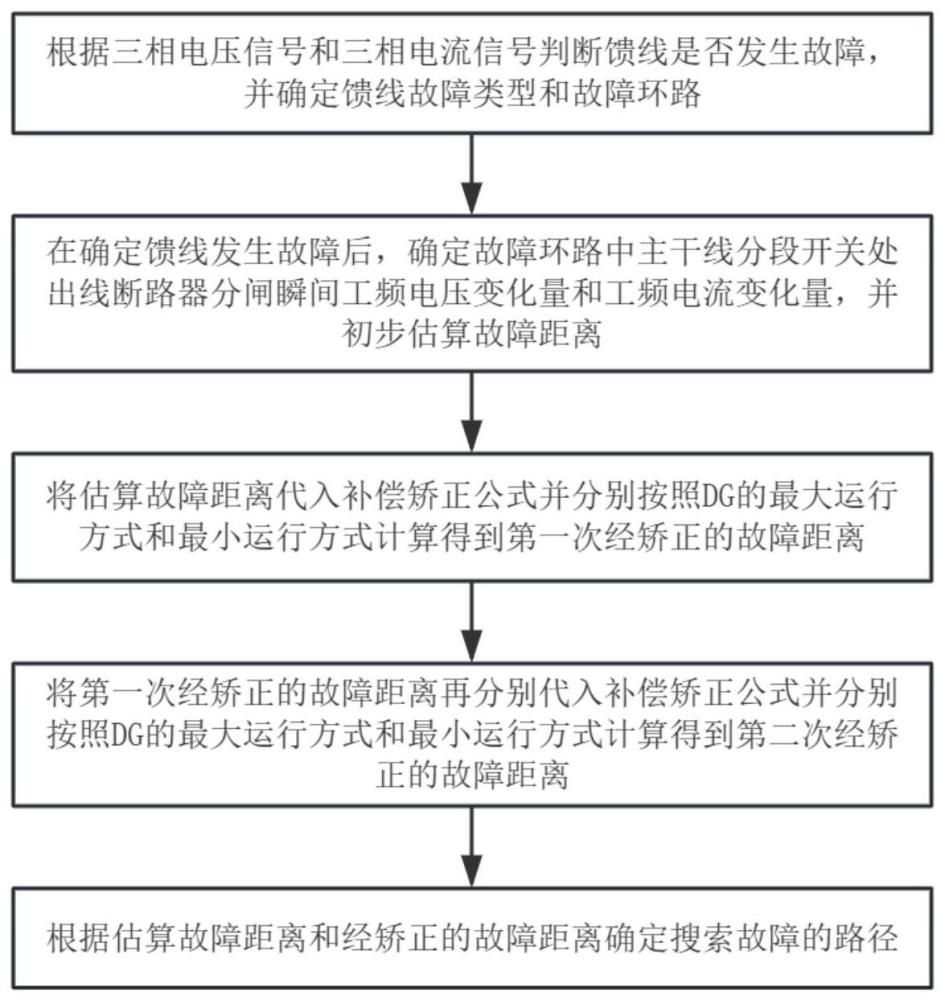
3、本发明的第一方面在于提供一种适用于多能场景馈线自动化的故障测距方法,包括:根据三相电压信号和三相电流信号判断馈线是否发生故障,并确定馈线故障类型和故障环路;在确定馈线发生故障后,确定所述故障环路中主干线分段开关处出线断路器分闸瞬间工频电压变化量和工频电流变化量,并初步估算故障距离;将所述估算故障距离代入补偿矫正公式并分别按照dg的最大运行方式和最小运行方式计算得到第一次经矫正的故障距离;将所述第一次经矫正的故障距离再分别代入补偿矫正公式并分别按照dg的最大运行方式和最小运行方式计算得到第二次经矫正的故障距离;根据所述估算故障距离和经矫正的故障距离确定搜索故障的路径。
4、作为本发明所述的适用于多能场景馈线自动化的故障测距方法的一种优选方案,其中,所述故障环路中主干线分段开关处出线断路器分闸瞬间工频电压变化量和工频电流变化量的确定包括:
5、获取所述故障环路中主干线分段开关处出线断路器分闸后两个工频周期的采样电压和采样电流,以及分闸前两个工频周期的采样电压和采样电流,并分别相减得到所述主干线分段开关处出线断路器分闸瞬间电压变化量和分闸瞬间电流变化量;
6、利用全周傅氏算法分别根据所述主干线分段开关处出线断路器分闸瞬间电压变化量和分闸瞬间电流变化量,得到主干线分段开关处分闸瞬间工频电压变化量和分闸瞬间工频电流变化量。
7、作为本发明所述的适用于多能场景馈线自动化的故障测距方法的一种优选方案,其中,所述估算故障距离包括:
8、根据所述主干线分段开关处分闸瞬间工频电压变化量和分闸瞬间工频电流变化量得到估算故障距离,表示为:
9、
10、
11、其中,表示主干线分段开关fs1处分闸瞬间工频电压变化量,表示主干线分段开关fs1处分闸瞬间工频电流变化量,表示分支线开关fs11处分闸瞬间工频电流变化量,z1a表示主干线分段开关fs1与dg接入主干线的节点a之间的等值阻抗,zak表示节点a与故障点k之间的等值阻抗,lk表示主干线分段开关fs1与故障点k之间即测试点与故障点的实际距离,z1表示线路单位长度阻抗,l′fk表示估算的故障距离。
12、作为本发明所述的适用于多能场景馈线自动化的故障测距方法的一种优选方案,其中,包括:
13、基于开路附加网络确定分支线开关处分闸瞬间工频电流变化量;
14、获取分布式电源接入主干线的节点a与故障点k之间的等值阻抗以及线路单位长度阻抗;
15、根据所述分布式电源接入主干线的节点a与故障点k之间的等值阻抗、线路单位长度阻抗、分支线开关处分闸瞬间工频电流变化量和主干线分段开关处分闸瞬间工频电流变化量确定测距误差。
16、作为本发明所述的适用于多能场景馈线自动化的故障测距方法的一种优选方案,其中,还包括:
17、基于所述测距误差结合主干线电流和分支线电流的关系,并减去已知的主干线分段开关fs1与节点a之间距离,得到估算的节点a与故障点k点之间的距离,表示为:
18、
19、其中,l′fak表示估算的节点a与故障点k点间的距离,lak表示实际的节点a与故障点k点间的距离,zg表示分支线开关fs11的dg侧的等值阻抗;
20、所述实际的节点a与故障点k点间的距离的计算为:
21、
22、其中,x表示补偿矫正系数。
23、作为本发明所述的适用于多能场景馈线自动化的故障测距方法的一种优选方案,其中,所述第一次经矫正的故障距离的获取包括:
24、将所述估算故障距离代入补偿矫正公式并分别按照dg的最大运行方式和最小运行方式计算得到dg最大运行方式下的第一次补偿矫正值l′ak,max和最小运行方式下的第一次补偿矫正值l′ak,min,表示为:
25、
26、
27、式中,
28、其中,z′ak表示估算故障距离代入补偿矫正公式得到的第一次估算值,zg,max表示分支线开关fs11在最大运行方式下的dg侧的等值阻抗,zg,min表示分支线开关fs11在最小运行方式下的dg侧的等值阻抗。
29、作为本发明所述的适用于多能场景馈线自动化的故障测距方法的一种优选方案,其中,所述第二次经矫正的故障距离的获取包括:
30、将所述第一次经矫正的故障距离再分别代入补偿矫正公式并分别按照dg的最大运行方式和最小运行方式计算得到得到dg最大运行方式下的第二次补偿矫正值l″ak,max和最小运行方式下的第二次补偿矫正值l″ak,min,表示为:
31、
32、
33、式中,
34、其中,z″ak,max表示第一次经矫正的故障距离代入补偿矫正公式的最大运行方式下的第二次估算值,z″ak,min表示第一次经矫正的故障距离代入补偿矫正公式的最小运行方式下的第二次估算值。
35、本发明的第二方面在于提供一种适用于多能场景馈线自动化的故障测距系统,包括:
36、距离初步估算单元,用于根据三相电压信号和三相电流信号判断馈线是否发生故障,并确定馈线故障类型和故障环路,在确定馈线发生故障后,确定所述故障环路中主干线分段开关处出线断路器分闸瞬间工频电压变化量和工频电流变化量,并初步估算故障距离;
37、故障距离矫正单元,用于将所述估算故障距离代入补偿矫正公式并分别按照dg的最大运行方式和最小运行方式计算得到第一次经矫正的故障距离,将所述第一次经矫正的故障距离再分别代入补偿矫正公式并分别按照dg的最大运行方式和最小运行方式计算得到第二次经矫正的故障距离;
38、故障路径确定单元,用于根据所述估算故障距离和经矫正的故障距离确定搜索故障的路径。
39、本发明的第三方面在于提供一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器被配置为调用所述存储器存储的指令,以执行本发明任一实施例所述方法的步骤。
40、本发明的第四方面在于提供一种计算机可读存储介质,其上存储有计算机程序指令,包括:
41、所述计算机程序指令被处理器执行时实现如本发明任一实施例所述方法的步骤。
42、与现有技术相比,本发明的有益效果为:
43、本发明在判断馈线发生故障后,基于开路附加网络确定故障环路中主干线分段开关处分闸瞬间工频电压变化量和分闸瞬间工频电流变化量,并根据分闸瞬间工频电压变化量和分闸瞬间工频电流变化量估算故障距离,再基于经补偿矫正的故障距离即可进一步确定故障点位于估算故障距离与经补偿矫正的故障距离之间并靠近后者处。由此,本发明能够适用于测试点与故障点之间接入分支线的情况,以及本发明所述的故障测距方法结合多能场景下的远方控制型馈线自动化的故障区段定位,基于本地存储数据,并利用开路附加网络,能够较准确找到故障区段内的故障点具体位置,从而能够有效降低现场运维人员巡线强度,便于及时修复故障线路,提高配电网供电可靠性,保证电力系统安全稳定运行,并可满足多能场景下的远方控制型馈线自动化的进一步拓展的实际需求。另外,本发明基于本地数据进行计算,无需通信,且具有计算简单,成本低的优点。
- 还没有人留言评论。精彩留言会获得点赞!