舱门试验装置和方法与流程
本技术涉及舱门控制,尤其涉及一种舱门试验装置和方法。
背景技术:
1、舱门机构作为飞机系统的重要组成部分,对飞机进行试验验证和适航取证非常关键。传统的方式是采用实物验证结合人工操作的方法进行试验。实物验证是指使用实际的物理样机进行试验,以检验其设计、性能和可靠性是否符合要求。人工试验则是通过人工操作来执行试验过程,例如手动操作按钮、拉动手柄来控制舱门的开启和关闭,以评估运动流畅性和操作便捷性等方面。
2、然而,传统的实物验证加人工试验方式存在一些问题:首先,这种方式的试验流程复杂,过程枯燥,所需时间周期漫长。其次,在保证试验安全和结果可靠的前提下,如何提高试验效率成为舱门机构功能试验亟需解决的问题。
技术实现思路
1、本技术提供一种舱门试验装置和方法,用以解决传统的试验方式所存在的问题。
2、第一方面,本技术提供一种舱门试验方法,所述方法包括:
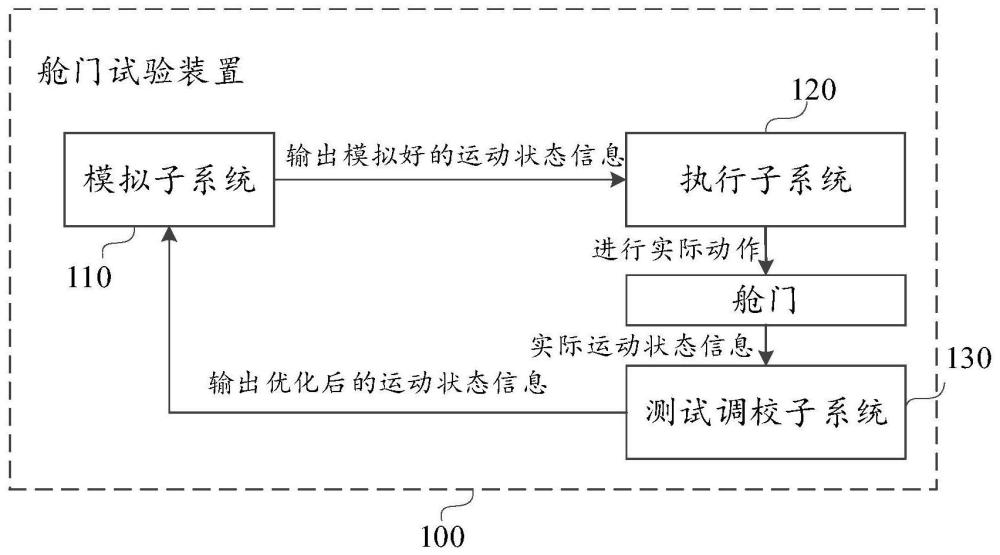
3、模拟子系统,用于根据预设的运动状态信息模拟舱门的运动,所述运动状态信息包括位置信息、姿态信息以及速度信息;
4、执行子系统,用于根据所述模拟子系统模拟后输出的运动状态信息驱动所述舱门进行实际动作;
5、测试调校子系统,对所述舱门进行实际动作时进行测量,以得到舱门的实际运动状态信息并对其进行优化,并将优化后的运动状态信息传输至所述模拟子系统以进行再次模拟和验证。
6、在本技术的一实施例中,所述模拟子系统包括模拟模块和编程模块;所述模拟模块用于根据预设的运动状态信息模拟舱门的运动,所述编程模块用于将所述模拟模块模拟后的运动状态信息转换为程序指令以传输至执行设备。
7、在本技术的一实施例中,所述执行子系统包括可调节平台、执行设备、仿生执行器以及视觉定位模块;所述可调节平台为提供支撑和运动基础的平台,用于支持和定位执行设备;所述执行设备,用于根据程序指令驱动舱门动作;所述仿生执行器用于模仿人的动作对舱门进行实际动作;所述视觉定位模块用于使用视觉技术对舱门和周围环境进行定位识别以确保所述执行设备能够操作舱门。
8、在本技术的一实施例中,所述测试调校子系统包括测试设备、测量靶标以及调校模块;所述测试设备用于监测和记录舱门的实际运动状态信息,所述测量靶标用于测量舱门的实际运动状态信息,所述调校模块用于根据所述实际运动状态信息进行测试调校以优化舱门的实际运动状态信息。
9、在本技术的一实施例中,所述调校模块还包括数字孪生模块,所述数字孪生模块用于从所述模拟子系统中获取模拟舱门的运动状态信息以用于创建数字孪生模型,并通过所述数字孪生模型与实时采集到的实际运动状态信息进行比较分析,当所述实际运动状态信息与所述数字孪生模型之间的误差超过预设值时,所述数字孪生模块对所述实际运动状态信息进行优化,以确保优化后的运动状态信息在所述预设值内,并将优化后的运动状态信息传输至所述模拟子系统,同时也随之优化所述数字孪生模型。
10、在本技术的一实施例中,所述仿生执行器包括可更换的末端执行器以适用多种不同的舱门。
11、在本技术的一实施例中,所述执行设备包括控制柜和底座,所述执行设备通过所述底座安装在所述可调节平台上,所述控制柜用于实现所述执行设备的底层控制并与其他设备进行通信。
12、在本技术的一实施例中,所述视觉定位模块包括图像测试设备和图像处理设备,所述图像测试设备安装在所述仿生执行器以用于拍摄舱门手柄位置,并将拍摄到的图像发送至所述图像处理设备进行处理。
13、在本技术的一实施例中,所述测试设备包括激光跟踪仪和传感器,所述测量靶标安装在舱门上以使得所述激光跟踪仪通过跟踪所述测量靶标的位置以测量出舱门的位置信息并将其传递至所述调校模块,所述传感器安装在舱门上以用于测量舱门的姿态信息和速度信息并将其传递至所述调校模块。
14、第二方面,本技术还提供一种舱门试验方法,所述方法包括:
15、模拟步骤:根据预设的运动状态信息模拟舱门的运动,所述运动状态信息包括位置信息、姿态信息以及速度信息;
16、执行步骤:根据模拟后输出的运动状态信息驱动所述舱门进行实际动作;
17、测试调校步骤:对所述舱门进行实际动作时进行测量,以得到舱门的实际运动状态信息并对其进行优化,并将优化后的运动状态信息进行再次模拟和验证。
18、在本技术的一实施例中,所述模拟步骤还包括:
19、编程步骤:将模拟后的运动状态信息转换为程序指令以传输至执行设备。
20、在本技术的一实施例中,所述测试调校步骤还包括:
21、创建数字孪生模型步骤:获取模拟舱门的运动状态信息以用于创建数字孪生模型,并通过所述数字孪生模型与实时采集到的实际运动状态信息进行比较分析,当所述实际运动状态信息与所述数字孪生模型之间的误差超过预设值时,所述数字孪生模块对所述实际运动状态信息进行优化,以确保优化后的运动状态信息在所述预设值内,并将优化后的运动状态信息传输至所述模拟子系统,同时也随之优化所述数字孪生模型。
22、在本技术的一实施例中,所述模拟步骤还包括:
23、创建仿真环境,并将机器人、舱门、工装的模型导入模拟子系统,并按照真实试验环境的位置进行布置,舱门手柄的初始运动轨迹被用作驱动,以实现舱门的动作,从仿真环境中获取舱门手柄力/力矩、舱门手柄角度、舱门各关节转角、舱门关键结构/机构的位移轨迹、舱门关键结构/机构的运动速度/加速度、舱门关键机构应力/应变以及舱门与门框的间隙/阶差的参数;
24、通过模拟子系统驱动舱门手柄来开启和关闭舱门,并使用仿生执行器的末端执行器模拟舱门手柄的动作,以及通过仿真生成机器人动作轨迹和记录每个位姿的关节转角。
25、在本技术的一实施例中,所述测试调校步骤还包括:
26、操作舱门后,将舱门的各项参数导入模拟子系统进行数据比对,与仿真差异较大的参数会被提示出来,并通过参数调节来使仿真的舱门参数与数字孪生模型的真实参数一致。
27、在本技术的一实施例中,所述编程步骤还包括:
28、根据生成的机器人程序和获取到的参数进行自动化设备的程序编写,包括机器人运动轨迹、末端执行器动作以及测量设备的介入时机,其中所述测量设备包括传感器和非接触测量设备,所述传感器用于测量力/力矩、角度、位移、速度以及加速度,所述非接触测量设备用于测量应变、位移、角度、速度以及加速度。
29、在本技术的一实施例中,所述执行步骤还包括:
30、使用声振相机对舱门的四个r角进行监测,以检查舱门的密封件是否发生挤出;
31、对舱门的运动机构进行监控,以检测所述运动机构是否有异响;
32、使用红外测温仪对舱门的所述运动机构进行监控,以检测所述运动机构是否升温超过设定的阈值;
33、对舱门的各个部分进行应变测量,如果所述应变测量超过第一阈值,则触发警报;
34、当所述参数中的任一参数超过第二阈值时,则控制机器人执行减速操作或执行停止操作。
35、在本技术的一实施例中,所述方法还包括:
36、对舱门运动机构进行机械原理仿真,包括运动学仿真和连杆仿真,并通过遗传算法计算出最优的运动机构,以及对舱门的可调杆进行调节;
37、将二维运动学仿真结果进行三维动力学仿真,其中舱门的仿真模型采用参数化建模;
38、进行舱门的三维动力学仿真,并根据仿真结果求解机器人的逆解,以得到机器人数据,其中所述机器人数据包括在不同时刻的六个转动关节角度值以及最佳的手柄力和运动速度;
39、根据所述机器人数据编写程序,以使得机器人对舱门进行操作和控制;
40、在实际执行环境中,使用机器人和测量设备对舱门进行试验,并将试验测得的数据导入到预设的舱门试验数据库模块中,以用于构建数字孪生模型,以及通过将所述数字孪生模型与所述仿真模型进行比对,以确定是否需要进行参数修正。
41、本技术提供的舱门试验装置和方法,通过模拟子系统根据预设的运动状态信息,能够模拟舱门的运动行为。这样可以在试验装置中模拟不同的运动状态,有助于测试和评估舱门的性能、稳定性和安全性。并且,执行子系统根据模拟子系统模拟后输出的运动状态信息,能够实际驱动舱门进行动作。该实际动作能够验证模拟结果,并确保装置的真实工作与模拟一致。
42、而且,测试调校子系统能够对实际运动状态信息进行优化。通过对实际运动状态信息的反馈和分析,可以识别和改进可能存在的误差,以提高舱门的运动控制和性能。
43、此外,优化后的运动状态信息被传输至模拟子系统,用于再次模拟和验证。该再次模拟和验证可以进一步验证和确认优化后的运动状态信息的有效性,并评估调整和改进的效果。从而实现“模拟-执行-测试调校”一体化结构设置。
- 还没有人留言评论。精彩留言会获得点赞!