应答机测距的频偏误差控制电路及控制方法与流程
本发明属于雷达测距,尤其涉及一种频偏误差控制电路及方法,可用于应答机的距离测量,提高应答机的测距精度。
背景技术:
1、雷达和应答机构成询问应答式二次雷达系统,应答机装在飞机,雷达位于地面。雷达向应答机周期性发射脉冲询问信号,应答机接收询问信号,对其进行判断和处理,向雷达回复脉冲应答信号,同时,应答机兼具高度表功能,可探测飞机与地面的距离,采用线性调频连续波信号,其信号波形为锯齿波,调频带宽为b,信号周期为t,应答机的压控振荡器产生线性调频连续波发射,该发射信号经目标反射产生一定时间延迟后的回波信号被应答机接收,应答机将该回波信号与发射信号的复制品进行混频,随后依次进行滤波、相干检波和采样,最后采用一组窄带滤波器用fft方法进行频谱分析,提取出频率信息即差频fb,再根据光速c、锯齿波信号周期t、差频fb、调频带宽b这四者与目标距离r的关系:r=(c×t×fb)÷(2×b),计算得到目标距离,得到测距误差△r/r=△fb/fb+△t/t-△b/b。式中,fb的误差与fft的处理点数有关,若点数越大则频率分辨率越高,可把fb的误差控制在0.1%以内;采用高稳定度晶振以及高速数字时钟计数,则t的量化误差很小,可把t的误差控制在0.1%以内;b的误差与压控振荡器的稳定度有关,压控振荡器频率的波动造成了调制频偏误差,当应答机的工作频率不高于c波段时,b的误差可控制在1%以内。根据以上公式得知,b的误差是制约应答机测距精度提高的首要因素。
2、现有对压控振荡器的调制主要有模拟调制的方式和数字调制方式,其中:
3、对压控振荡器进行模拟调制的方式,如图1所示,其采用幅度从低到高线性变化的锯齿波电压来调制压控振荡器的输出频率,这种方式不仅会产生一定带宽的线性调频连续波信号,而且当压控振荡器调谐端受到电源纹波影响时,会造成输入的锯齿波电压线性度变差,使压控振荡器的输出频率产生随机偏移,导致调频带宽b发生变化,影响应答机的测距精度。频率越高则压控振荡器的输出频率越容易产生随机偏移现象,导致调频带宽b的误差增大。当应答机的工作频率高于c波段时,在全温度范围中调频带宽b的误差大于1%,降低了应答机的测距精度。
4、当对压控振荡器采用数字调制方式时,是把模拟的锯齿波电压变成数字量电压,用数字锁相环来控制压控振荡器的输出频率,数字锁相环的频率递增歩阶受数字量电压控制,频率歩阶与采样步长互为线性关系。当在近距时,由于锯齿波信号周期时间短,所以数字量的采样点数少,在快速傅立叶变换fft进行频谱分析时,由于频率步阶大且点数少,提取出的频率信息不准确,会出现偏移现象,因而导致近距的测距精度不能满足使用要求。
技术实现思路
1、本发明的目的在于针对上述现有技术的不足,提出一种应答机测距的频偏误差控制电路及控制方法,以实现对线性调频信号调制频偏的精密控制,提高线性调频信号的频率稳定度,从而提高应答机的测距精度。
2、本发明的技术思路是:通过频综源模块输出高频率稳定度的点频信号;通过功分器分成两路输出,一路经分频后与斜坡发生器环路模块输出的低频线性调频信号进行混频,产生高频线性调频信号输入到高混频模块中,另一路经倍频后在高混频模块中与高频线性调频信号进行混频,产生更高频线性调频信号,并通过发射通道传输至天线发射。其实现方案如下:
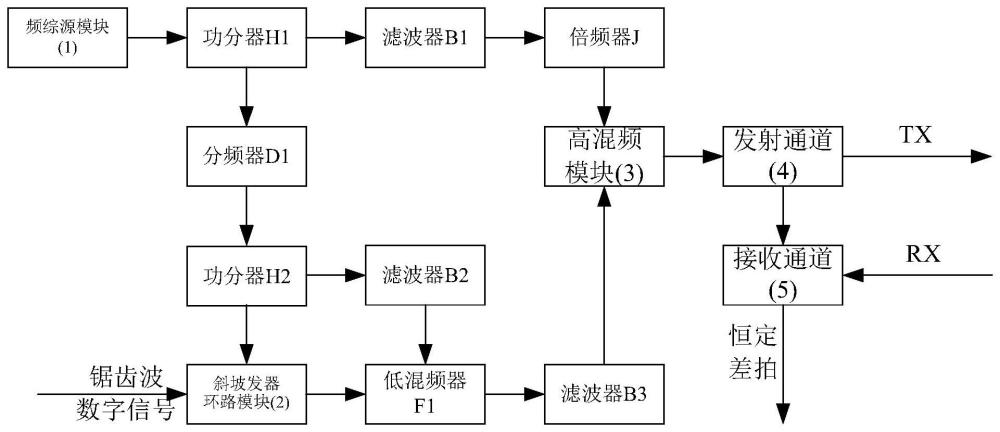
3、1.一种应答机测距的频偏误差控制电路,包括:发射通道、接收通道和调频源,其特征在于:还包括频综源模块1、斜坡发生器环路模块2、高混频模块3;
4、所述频综源模块1分两路输出,一路通过第一功分器h1、分频器d1、第二功分器h2与斜坡发生器环路模块2连接,该第二功分器h2的第二输出端通过第二滤波器b2输入到低混频器f1;另一路通过第一功分器h1、第一滤波器b1、倍频器j与高混频模块3连接;
5、所述斜坡发生器环路模块2作为调频源,其通过低混频器f1、第三滤波器b3与高混频模块3连接;
6、所述高混频模块3,将倍频器j输出的信号与第三滤波器b3输出的信号进行混频后输入给发射通道4,并通过天线发射端口发射;接收通道5接收其发射信号,输出恒定差频信号进行测距。
7、进一步,所述频综源模块1,包括:晶振e、第二分频器d2、鉴相器a、第四滤波器b4、压控振荡器c和第三功分器h3;晶振e的输出端与鉴相器a的第一输入端连接,鉴相器a的输出端经过第四滤波器b4与压控振荡器c的输入端连接,压控振荡器c的输出端通过第三功分器h3分成两路输出,即第一路输出进入第一功分器h1的输入端,第二路输出通过第二分频器d2反馈给鉴相器a第二输入端,形成锁相环路;当第二分频器d2输出信号与晶振e输出信号相位差恒定后,则鉴相器a会输出恒定值不变的直流电压信号,使压控振荡器c输出频率锁定在11600mhz的点频上,通过第三功分器h3的第一输出端输入到第一功分器h1输入端。
8、进一步,所述斜坡发生器环路模块2,包括:数字斜坡发生装置l、第五滤波器b5、第六滤波器b6;第五滤波器b5对第二功分器h2输入的点频信号滤波后传输给数字斜坡发生器l作为其参考时钟,该斜坡发生装置l在参考时钟的驱动和外部锯齿波数字信号的控制下产生93mhz~257mhz低频数字线性调频信号,该数字线性调频信号经过第六滤波器b6滤波后再进入低混频器f1输入端。
9、进一步,所述高变频模块3,包括:第七滤波器b7、第一放大器g1、第八滤波器b8和高混频器f2;第七滤波器b7对倍频器j输出的信号进行滤波后进入高混频器f2;第一放大器g1对第三滤波器b3输出的信号进行功率放大后,再通过第八滤波器b8滤波进入高混频器f2;高混频器f2对进入的这两路信号进行混频,产生24018mhz~24182mhz的更高频线性调频信号,并将其传输到发射通道4中。
10、进一步,所述发射通道4,包括:第九滤波器b9、第二放大器g2、第十滤波器b10和耦合器k;高混频模块3输出的更高频线性调频信号依次通过第九滤波器b9、第二放大器g2、第十滤波器b10和耦合器k后传输到天线发射端口发射,接收通道5进行接收。
11、2.一种应答机测距的频偏误差控制方法,其特征在于,包括如下:
12、使用晶振作为参考源,通过锁相环路技术使频综源模块产生11600mhz的稳定点频信号,并分成两路支路输出,一条经倍频后输入到高混频模块进行混频,另一条又分成两路输出,第一路输出给低混频器,第二路输出给斜坡发生器环路模块作为参考时钟;
13、在参考时钟的驱动和外部锯齿波数字信号控制下,斜坡发生器环路模块产生频率为93mhz~257mhz的低频线性调频信号进入低混频器;
14、低混频器对稳定点频信号和斜坡发生器环路模块输出的低频线性调频信号进行混频,产生频率为818mhz~982mhz的高频线性调频信号,再通过滤波后输入给高混频模块;
15、高混频模块将输入的高频线性调频信号与倍频后的点频信号进行混频,产生频率为24018mhz~24182mhz的更高频线性调频信号,实现对频偏误差的控制,并输入给发射通道,通过天线发射端口发射,接收通道接收其发射信号,输出恒定差频信号进行测距。
16、本发明与现有技术相比,具有如下优点:
17、第一,本发明由于使用高频率稳定度、低相位噪声的晶振作为参考源,通过锁相环路技术使频综源模块产生11600mhz的稳定点频信号,可提高频率稳定度,降低相位噪声。
18、第二,本发明由于采用数字式斜坡发生技术,用725mhz点频信号作为参考时钟,可加快扫频速度、减小频率递增歩阶、缩减采样步长、增加采样点数、提高频率稳定度和线性度。
19、第三,本发明由于将点频信号与线性调频信号进行混频,产生更高频率的24018mhz~24182mhz线性调频信号,进一步提高了输出频率的稳定度,降低了输出信号发生频率偏移的概率,同时提高了信号的输出频率。
- 还没有人留言评论。精彩留言会获得点赞!