一种基于FPGA的激光干涉仪方向判断优化方法
(一)本发明涉及光电信号处理领域,尤其涉及一种基于fpga的激光干涉仪方向判断优化方法。
背景技术:
0、(二)背景技术
1、精密位移测量技术在工业生产、科学技术和国防建设等众多领域都有着非常重要而又广泛的应用。近年来,国际前沿尖端技术的快速发展对精密位移测量技术提出了新的要求,测量精度从纳米量级向亚纳米量级提高,测量速度也达到毫米秒量级。目前用于精密位移测量领域的测量工具主要有激光干涉仪和光栅干涉仪。
2、激光干涉测量以其优异的性能和广泛的应用场合,成为精密测量领域不可缺少的基本技术。激光干涉仪测量工具对物体进行高精度位移测量多使用基于幅值分辨的相位细分方法。基于幅值分辨的相位细分方法有很多种,都需要先使用雪崩光电二极管(apd)将光强信号转换为电信号,经过调理后通过模拟数字转换器(adc)采样转换为数字信号再进行解算,再由解算出的相位信息获得位移测量结果。
3、随着电子元器件和细分算法的发展,为了满足对运动物体更高分辨力和更高精确度位移测量需求,多采用高采样速率的adc来获得更加完整的光电信号信息和更高的相位细分数。但是也就造成现有的技术中的方向判断方法出现一些不好的影响。
4、现有的技术中的光栅尺公开一种利用正交信号的符号位和其幅值的变化趋势进行方向判断的方法。该方法在传统的四细分辨向方法的基础上,增加了对仅含有多普勒频率的正交信号幅值的变化趋势进行综合方向判别的方法。
5、现有的技术中的利用信号的符号位和其幅值的变化趋势进行方向判断方法受制高速adc的影响,在多个时间周期内不一定存在准确的幅值变化趋势,会造成测量对象在低速运动时会出现辨向不准确和不灵敏的问题。
6、现有的技术中的双频激光干涉仪公开一种判断所求多普勒频率δf正负性进行方向判断的方法。该方法通过多普勒频率δf与测量对象的位移关系来进行方向的判断。
7、现有的技术中的判断所求多普勒频率δf正负性进行方向判断的方法拥有很高方向判断的实时性。但是当被测物体低速运动时,由于过高的adc采样率,导致δf的正负性难以满足方向判断的准确性。
技术实现思路
0、(三)
技术实现要素:
1、针对现有的技术受adc采样率的限制,在运动台低速运动时出现辨向不准确和不灵敏的问题,本发明的目的在于提供一种在不同多普勒频率下方向判断准确,实时性好的基于fpga技术的激光干涉仪方向判断优化方法。
2、本发明的目的是这样实现的:
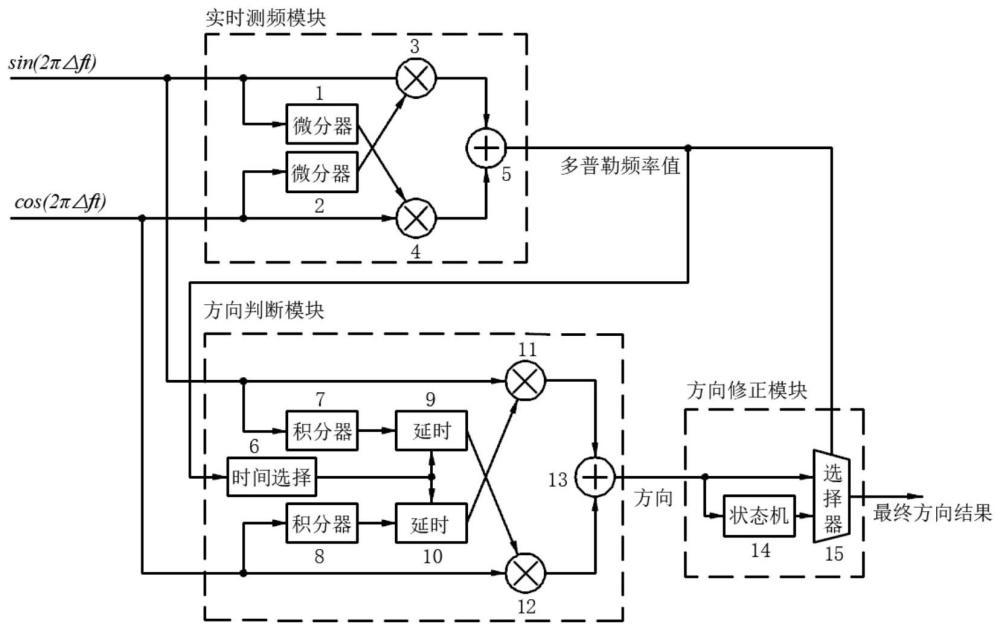
3、一种基于fpga的激光干涉仪方向判断优化方法,其特征是:它由微分器1和2,乘法器3、4、11和12,加法器5和13,时间选择单元6,积分器7和8,延时单元9和10,状态机14,选择器15组成;其中,所述方法由三个模块组成,实时测频模块将仅含有多普勒频率的正交信号通过微分器1和2,在乘法器9和10交叉相乘之后两路信号通过加法器11,获得当前多普勒的频率值;方向判断模块将仅含有多普勒频率的正交信号通过积分器1和2,然后通过延时单元9和10,时间选择单元6根据多普勒频率值动态选择输出延时时间,得到经过动态调节延时时间的积分结果与正交信号在乘法器11和12处交叉相乘,再通过加法器13输出方向;方向校正模块中选择器15根据多普勒频率值选择是否通过状态机14来对方向判断模块输出方向结果进行校正。
4、由激光干涉仪产生的光电信号提取出仅保留多普勒频率的正交信号的表达式如式(11)和(12)所示:
5、fsin=sin(2πδft) (11)
6、fcos=cos(2πδft) (12)
7、经过微分后,得到的信号如(13)和(14)所示:
8、f′cos=sin(2πδft2)-sin(2πδft1) (13)
9、f′sin=cos(2πδft2)-cos(2πδft1) (14)
10、再经过交叉相乘之后通过加法器,结果如式(15)所示:
11、fcos×f′sin+fsin×f′cos=2πδft (15)
12、从公式(15)可以看出,实时测频模块的输出结果仅与多普勒的频率δf有关。该实时测频模块可以输出多普勒的频率信息,并且基于fpga技术的流水线设计特点,可以确保在每个信号的采样周期都能够更新准确的多普勒频率信息。
13、基于fpga技术的流水线设计特点,在每个信号的采样周期更新频率信息,保证方向判断算法的实时性。由式(15)可以看到实时测频模块的输出结果与多普勒频率线性相关,保证输出的多普勒频率信息的准确性。
14、由激光干涉仪产生的光电信号提取出仅保留多普勒频率的正交信号的表达式如上式(11)和(12)所示。对这对正交信号任意临近的三个采样周期用辛普森法则做定积分运算,去最大程度逼近区间[ti-1,ti+1]定积分数值,如式(16)、(17)所示:
15、
16、
17、以任意这样的三个采样点作为一个积分器,通过延时单元对积分器进行延时,时间选择单元根据实时测频模块计算出来的多普勒频率信息调节延时时间,获得不同时间长度的积分区间[ta,tb],如式(18)、(19)所示:
18、
19、
20、将区间为[ta,tb]的积分计算结果与正交信号交叉相乘之后,得到结果如式(20)所示:
21、
22、从公式(20)可以看出,方向判别模块输出结果的符号和多普勒的频率1/δf的符号相同。因为激光干涉仪测量对象的运动方向与多普勒频移δf的符号相关,所以可以根据式(20)的符号对激光干涉仪测量对象的进行方向判断。
23、由于信号噪声的影响,当cos2πδf(t2-t1)的数值接近1时,造成式(20)计算结果会在正负之间跳动,从而出现方向判断错误情况。因此对于某个信号周期为t的多普勒频率,区间[ta,tb]的积分时间不应该趋近于0,t,2t……等整数倍周期。考虑到所提出方向判断优化方法的实时性,因此区间[ta,tb]长度应选取区间[0,t]之间,并且不趋近两端时间点。
24、通过利用多普勒频移δf的符号进行方向判断在测量对象低速运动时可能会出现判断不准确的情况,但是通过计算1/δf的符号来进行方向判断会保证测量对象在低频时也有良好的方向判断准确性。同时,通过动态调节延时时间,可以保证在不同的多普勒频率下方向判断的实时性。
25、根据实时测频模块计算出来的多普勒频率信息区分当前多普勒频率是否处于低频状态,若处于低频状态需要利用宽进严出状态机对方向判断模块的判断结果进行方向的校正;若是处于高频状态则直接将方向判断模块的判断结果进行输出。
26、测量对象的静止状态并不一定意味着绝对静止,缓慢的漂移会引起一些频率的变化,同时由于实际的工程要求,高采样率的adc对于较低的多普勒频率时,会占用大量的资源。设计一个宽进严出的状态机,可以保证在低频方向判断准确性的同时,保证较少的fpga资源利用率。
- 还没有人留言评论。精彩留言会获得点赞!